1.本实用新型涉及一种长条类工件搬运堆叠系统。
背景技术:
2.目前,随着碳纤维材料作为增强材料与树脂、金属、陶瓷等材料复合,制作先进的复合材料,在航天,风力发电领域的运用越来越多,随着煤炭等不可再生资源的短缺,风力发电的推广也越来越多,风力发电所用的叶片是以碳纤维高强度材料为基础的。
3.这种叶片的长度很长,最长可以达到一两百米,叶片生产加工结束后,需要依靠吊装设备起吊搬运,传统的堆叠方式都是靠人工用手一层层完成堆叠,工件越长所需的人工也就越多,而且堆叠效率低,导致企业的人工成本增加。由于叶片是由若干组很薄的碳纤维板材叠加再经后道处理制作而成的,价格高昂,传统的吊装设备和人工堆叠的过程中,容易造成叶片掉落和损坏,给企业带来巨大损失。
技术实现要素:
4.本实用新型所要解决的技术问题是,克服现有技术的不足,提供一种长条类工件搬运堆叠系统,可以实现长条类工件的自动抓取、搬运和堆叠,安全性好,堆叠效率高。
5.为了解决上述技术问题,本实用新型的技术方案是:
6.一种长条类工件搬运堆叠系统,它包括:
7.支架组件,所述支架组件包括横梁以及固定在横梁两端的竖梁;
8.抓取组件,所述抓取组件包括固定座、垂直梁、长梁、吸嘴、水平移动机构和垂直移动机构,所述垂直梁通过垂直移动机构与固定座相连,所述固定座通过水平移动机构与横梁相连,所述长梁固定在垂直梁的底部,若干所述吸嘴均匀设置在长梁的底部;
9.输送平台,所述输送平台位于抓取组件下方,用于输送长条类工件;
10.堆放平台,两个所述堆放平台分别位于输送平台的两侧,用于堆叠长条类工件。
11.进一步,所述水平移动机构包括水平电机、水平齿轮、水平齿条和水平导轨,所述水平电机固定在固定座上,所述水平齿轮固定在水平电机的电机轴上,所述水平齿条设置在横梁上并与水平齿轮啮合,两根所述水平导轨平行设置在横梁上,所述固定座上设置有与水平导轨配合滑动的水平滑块。
12.进一步,所述垂直移动机构包括连接板、垂直电机、垂直齿轮、垂直齿条和垂直导轨,所述垂直梁的侧壁与连接板固定连接,所述垂直电机固定在固定座上,所述垂直齿轮固定在垂直电机的电机轴上,所述垂直齿条固定在连接板上,所述垂直齿轮与垂直齿条啮合,两根所述垂直导轨平行设置在连接板上,所述固定座上设置有与垂直导轨配合滑动的垂直滑块。
13.进一步,所述长梁的底部设置有夹爪组件,所述夹爪组件包括固定框架、垂直气缸、水平气缸和抱臂,所述固定框架的顶部与长梁固定连接,两个所述垂直气缸分别设置在固定框架的两个侧壁上,所述垂直气缸的输出端连接有衔接板,所述水平气缸固定在衔接
板的底部,两个所述抱臂分别固定在水平气缸的左右输出端上。
14.采用了上述技术方案,本实用新型通过抓取组件在支架组件的横梁上做上下和左右移动,安装两个堆放平台进行堆叠和包装,实现对长条类工件的自动抓取、搬运和堆叠,工作效率更高,安全可靠。本实用新型通过真空吸嘴吸取长条类工件后,再配合夹爪组件将长条类工件抱紧,防止工件掉落,进一步提高了安全性。
附图说明
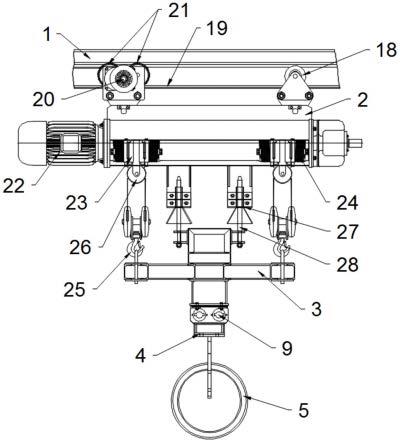
15.图1为本实用新型的一种长条类工件搬运堆叠系统的主视图;
16.图2为本实用新型的抓取组件的结构示意图;
17.图3为本实用新型的水平移动机构的结构示意图;
18.图4为本实用新型的垂直移动机构的结构示意图;
19.图5为本实用新型的夹爪组件的结构示意图。
具体实施方式
20.为了使本实用新型的内容更容易被清楚地理解,下面根据具体实施例并结合附图,对本实用新型作进一步详细的说明。
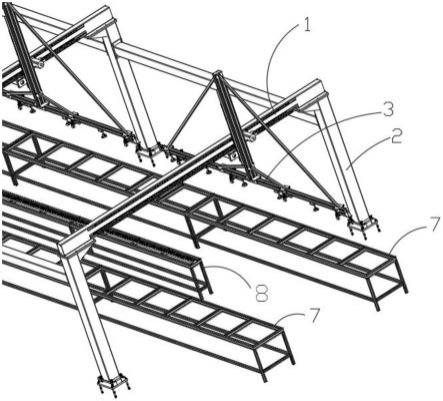
21.如图1~5所示,本实施例提供一种长条类工件搬运堆叠系统,它包括多个支架组件,每个支架组件上安装一个抓取组件3,抓取组件3下方安装有输送平台8和堆放平台7,输送平台8上安装有辊轮,输送平台8用于输送长条类工件,两个堆放平台7分别位于输送平台8的两侧,用于堆叠长条类工件。本实施例设置两个堆放平台7,当抓取组件3将输送平台8上的长条类工件堆叠到一个堆放平台7上后,在该堆放平台7进行包装,同时抓取组件3将输送平台8上的长条类工件吊装到另一个堆放平台7上继续堆叠,设置两个堆放平台7,可以节省时间,提高工作效率。
22.如图1所示,本实施例的支架组件数量可根据场地大小和长条类工件的长度增加或者减少,支架组件包括横梁1以及固定在横梁1两端的竖梁2,竖梁2固定支撑在地面上。
23.如图2所示,本实施例的抓取组件3包括固定座31、垂直梁32、长梁33、吸嘴34、水平移动机构4和垂直移动机构5,垂直梁32通过垂直移动机构5与固定座31相连,固定座31通过水平移动机构4与横梁1相连,长梁33固定在垂直梁32的底部,若干吸嘴34均匀设置在长梁33的底部。垂直移动机构5带动吸嘴34上下移动,对下方的长条类工件进行吸取,吸取完成后,再由水平移动机构4带动长条类工件左右移动,堆叠在堆放平台7上。
24.如图3所示,水平移动机构4包括水平电机41、水平齿轮、水平齿条43和水平导轨44,图中未示出水平齿轮。水平电机41固定在固定座31上,水平齿轮固定在水平电机41的电机轴上,水平齿条43设置在横梁1上并与水平齿轮啮合,两根水平导轨44 平行设置在横梁1上,固定座31上设置有与水平导轨44配合滑动的水平滑块。水平电机41带动水平齿轮与水平齿条43啮合,从而使得固定座31可以沿着水平导轨44左右滑动,实现了长条类工件的左右搬运。
25.如图4所示,垂直移动机构5包括连接板51、垂直电机52、垂直齿轮、垂直齿条 54和垂直导轨55,图中未示出垂直齿轮。垂直梁32的侧壁与连接板51固定连接,垂直电机52固定在固定座31上,垂直齿轮固定在垂直电机52的电机轴上,垂直齿条54 固定在连接板51上,
垂直齿轮与垂直齿条54啮合,两根垂直导轨55平行设置在连接板51上,固定座31上设置有与垂直导轨55配合滑动的垂直滑块。垂直电机52带动垂直齿轮与垂直齿条54啮合,从而使得连接板51可以沿着垂直导轨55上下滑动,实现了垂直梁32在固定座31上做上下移动,从而带动吸嘴34上下移动。
26.如图5所示,为了防止吸嘴34吸取的长条类工件掉落造成损坏,长梁33的底部还设置有夹爪组件6,在吸嘴34吸住长条类工件后,夹爪组件6再将长条类工件抱住防止掉落。夹爪组件6包括固定框架61、垂直气缸62、水平气缸63和抱臂64,固定框架 61的顶部与长梁33固定连接,两个垂直气缸62分别设置在固定框架61的两个侧壁上,垂直气缸62的输出端连接有衔接板65,水平气缸63固定在衔接板65的底部,两个抱臂64分别固定在水平气缸63的左右输出端上。垂直气缸62带动水平气缸63和抱臂64 上下移动,水平气缸63驱动左右两个抱臂64打开或者抱紧长条类工件。
27.以上所述的具体实施例,对本实用新型解决的技术问题、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本实用新型的具体实施例而已,并不用于限制本实用新型,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。