1.本实用新型涉及渔业用品技术领域,尤其是指一种智能织网机紧结预抽摆臂机构。
背景技术:
2.渔业生产用的网具,通过网绳编织可以形成拖网、围网、撒网、定置网和网箱等。拖网和围网为海洋渔业捕捞用的重型网具,也可以用于生产流网捕鱼、曳网捕鱼、捞鱼捕鱼、诱饵捕鱼和定置捕鱼。或编织成为网箱,渔笼等捕捉用品;为了保证织网机在生产过程中网绳的张紧力,往往需要采用多级预存和张紧,从而使网绳能够平稳的进入织网机,传统的织网机大多只有一段张紧区,一旦张紧辊到达张紧极限,就无法使网绳张紧,对织网机生产会带来较大影响。
技术实现要素:
3.本实用新型的目的在于克服现有技术的不足,提供一种可以实现预抽时自动张紧的智能织网机紧结预抽摆臂机构。
4.为实现上述目的,本实用新型所提供的技术方案为:一种智能织网机紧结预抽摆臂机构,它包括有安装在机架上的预抽座,预抽座上活动安装有预抽摆臂,预抽摆臂输出方向的预抽座上设有压辊架,压辊架中部安装有输入托辊,输入托辊输出方向的压辊架上固定有水平支撑臂,水平支撑臂顶部安装有上张紧辊,水平支撑臂底部安装有下张紧辊,水平支撑臂外端安装有输出托辊,输出托辊与输入托辊之间安装有经线压辊。
5.所述的预抽摆臂为两条,预抽摆臂底部通过臂轴与预抽座铰接,下张紧辊安装在两条预抽摆臂下部之间,上张紧辊安装在两条预抽摆臂顶部之间;两条预抽摆臂上部之间连接有拉簧板,拉簧板上连接的张力拉簧,张力拉簧与压辊架顶部连接。
6.所述的经线压辊上方的压辊架上固定有悬臂,悬臂外端固定有竖直向下的压辊臂,压辊臂上设有竖直向下的压辊槽,经线压辊端部位于压辊槽内,压辊槽顶部的压辊臂上设有第一感应器。
7.所述的预抽摆臂一侧的压辊架上固定有限位抵触臂,限位抵触臂外端与预抽摆臂上部接触,限位抵触臂外端设有第二感应器。
8.本实用新型在采用上述方案后,所有感应器均由外部系统控制,网绳从上张紧辊绕过向下回绕过下张紧辊,从输入托辊、输出托辊顶部穿过后输出,经线压辊在自重下压在输入托辊、输出托辊之间的网绳上,经线压辊压在网绳上,此段网绳也会形成一定的伸缩区,张力拉簧对预抽摆臂提供拉力,拉动上张紧辊网绳偏向于压辊架方向,使网绳预留一定的张力区,当后工序拉扯速度大于前工序放绳速度时,网绳会拉动预抽摆臂上部向前绳方向行走,张力拉簧被拉伸,当预抽摆臂行至最远距离时(张力拉簧长度极限),此时会网绳带动经线压辊上行,当经线压辊上碰触到第一感应器时,第一感应器发送信号给外部系统,外部系统控制前工序放绳速度加快,反之,当前工序放绳速度大于后工序时,拉簧失为拉力,
预抽摆臂向限位抵触臂方向行走,当预抽摆臂与第二感应器接触时,表示网绳的放绳速度太快,第二感应器发送信号给外部系统,外部系统控制前工序降低放绳速度;通过这种方式防止因后工序拉扯力大导致网绳断裂,与外部系统配合后可以实现预抽时自动张紧的目的。
附图说明
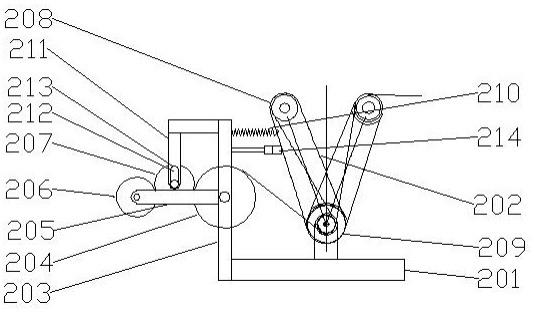
9.图1为本实用新型的整体结构示意图。
具体实施方式
10.下面结合所有附图对本实用新型作进一步说明,本实用新型的较佳实施例为:参见附图1,本实施例所述的一种智能织网机紧结预抽摆臂机构包括有安装在机架上的预抽座201,预抽座201上活动安装有预抽摆臂202,预抽摆臂202输出方向的预抽座201上设有压辊架203,压辊架203中部安装有输入托辊204,输入托辊204输出方向的压辊架203上固定有水平支撑臂205,水平支撑臂205顶部安装有上张紧辊208,水平支撑臂205底部安装有下张紧辊209,水平支撑臂205外端安装有输出托辊206,输出托辊206与输入托辊204之间安装有经线压辊207。
11.预抽摆臂202为两条,预抽摆臂202底部通过臂轴与预抽座201铰接,下张紧辊209安装在两条预抽摆臂202下部之间,上张紧辊208安装在两条预抽摆臂202顶部之间;两条预抽摆臂202上部之间连接有拉簧板,拉簧板上连接的张力拉簧210,张力拉簧210与压辊架203顶部连接。
12.经线压辊207上方的压辊架203上固定有悬臂,悬臂外端固定有竖直向下的压辊臂211,压辊臂211上设有竖直向下的压辊槽212,经线压辊207端部位于压辊槽212内,压辊槽212顶部的压辊臂211上设有第一感应器213。
13.预抽摆臂202一侧的压辊架203上固定有限位抵触臂,限位抵触臂外端与预抽摆臂202上部接触,限位抵触臂外端设有第二感应器214。
14.本实施例在采用上述方案后,所有感应器均由外部系统控制,网绳从上张紧辊绕过向下回绕过下张紧辊,从输入托辊、输出托辊顶部穿过后输出,经线压辊在自重下压在输入托辊、输出托辊之间的网绳上,经线压辊压在网绳上,此段网绳也会形成一定的伸缩区,张力拉簧对预抽摆臂提供拉力,拉动上张紧辊网绳偏向于压辊架方向,使网绳预留一定的张力区,当后工序拉扯速度大于前工序放绳速度时,网绳会拉动预抽摆臂上部向前绳方向行走,张力拉簧被拉伸,当预抽摆臂行至最远距离时(张力拉簧长度极限),此时会网绳带动经线压辊上行,当经线压辊上碰触到第一感应器时,第一感应器发送信号给外部系统,外部系统控制前工序放绳速度加快,反之,当前工序放绳速度大于后工序时,拉簧失为拉力,预抽摆臂向限位抵触臂方向行走,当预抽摆臂与第二感应器接触时,表示网绳的放绳速度太快,第二感应器发送信号给外部系统,外部系统控制前工序降低放绳速度;通过这种方式防止因后工序拉扯力大导致网绳断裂,与外部系统配合后可以实现预抽时自动张紧的目的。
15.以上所述之实施例只为本实用新型之较佳实施例,并非以此限制本实用新型的实施范围,故凡依本实用新型之形状、原理所作的变化,均应涵盖在本实用新型的保护范围内。
技术特征:
1.一种智能织网机紧结预抽摆臂机构,它包括有安装在机架上的预抽座(201),其特征在于:预抽座(201)上活动安装有预抽摆臂(202),预抽摆臂(202)输出方向的预抽座(201)上设有压辊架(203),压辊架(203)中部安装有输入托辊(204),输入托辊(204)输出方向的压辊架(203)上固定有水平支撑臂(205),水平支撑臂(205)顶部安装有上张紧辊(208),水平支撑臂(205)底部安装有下张紧辊(209),水平支撑臂(205)外端安装有输出托辊(206),输出托辊(206)与输入托辊(204)之间安装有经线压辊(207)。2.根据权利要求1所述的一种智能织网机紧结预抽摆臂机构,其特征在于:预抽摆臂(202)为两条,预抽摆臂(202)底部通过臂轴与预抽座(201)铰接,下张紧辊(209)安装在两条预抽摆臂(202)下部之间,上张紧辊(208)安装在两条预抽摆臂(202)顶部之间;两条预抽摆臂(202)上部之间连接有拉簧板,拉簧板上连接的张力拉簧(210),张力拉簧(210)与压辊架(203)顶部连接。3.根据权利要求1所述的一种智能织网机紧结预抽摆臂机构,其特征在于:经线压辊(207)上方的压辊架(203)上固定有悬臂,悬臂外端固定有竖直向下的压辊臂(211),压辊臂(211)上设有竖直向下的压辊槽(212),经线压辊(207)端部位于压辊槽(212)内,压辊槽(212)顶部的压辊臂(211)上设有第一感应器(213)。4.根据权利要求1所述的一种智能织网机紧结预抽摆臂机构,其特征在于:预抽摆臂(202)一侧的压辊架(203)上固定有限位抵触臂,限位抵触臂外端与预抽摆臂(202)上部接触,限位抵触臂外端设有第二感应器(214)。
技术总结
本实用新型提供一种智能织网机紧结预抽摆臂机构,它包括有安装在机架上的预抽座,预抽座上活动安装有预抽摆臂,预抽摆臂输出方向的预抽座上设有压辊架,压辊架中部安装有输入托辊,输入托辊输出方向的压辊架上固定有水平支撑臂,水平支撑臂顶部安装有上张紧辊,水平支撑臂底部安装有下张紧辊,水平支撑臂外端安装有输出托辊,输出托辊与输入托辊之间安装有经线压辊。本方案与外部系统配合后可以实现预抽时自动张紧的目的。抽时自动张紧的目的。抽时自动张紧的目的。
技术研发人员:黄瑞良 黄凯 孙卫军 周岩
受保护的技术使用者:湖南鑫海股份有限公司
技术研发日:2021.12.24
技术公布日:2022/8/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。