1.本发明涉及电子信息技术领域、医疗领域,具体为一种基于线结构光点云三维建模的人体腰围获取方法。
背景技术:
2.传统的人体腰围测量,由人工通过软尺进行测量,另外,受到不同患者的病情的影响,在测量人体尺寸时,医疗中环境中一些病人无法站立配合手工测量,这导致手工测量人体腰围时有效率低、误差大、缺乏一致性等缺点,随着经济成本与时间成本的提高,传统的手工测量无法满足大批量测量人体的需求,同时人体的测量技术从手工测量向着自动化测量发展,不论是接触式测量还是非接触式测量,都与身体部位高度相关,如何精确批量的获取人体尺寸成为了关键,并且目前的测量技术还有待改进和发展;
3.然而三维精密仪器是传感器技术以及未来的自动检测技术的发展方向,其中,线结构光三维测量方法具有精度高、适应性强、受环境光影响小、维护方便等特点,在工业测量以及移动测量等领域有着广泛应用,这在人体测量领域有着较好的发展前景,并且能够很好地解决上述问题,因此亟需设计一种基于线结构光点云三维建模的人体腰围获取方法。
技术实现要素:
4.本发明要解决的技术问题在于,针对现有技术的上述缺陷,提供一种基于线结构光点云三维建模的人体腰围获取方法,旨在解决现有技术中由人工测量带来的效率低、误差大、缺乏一致性等问题。
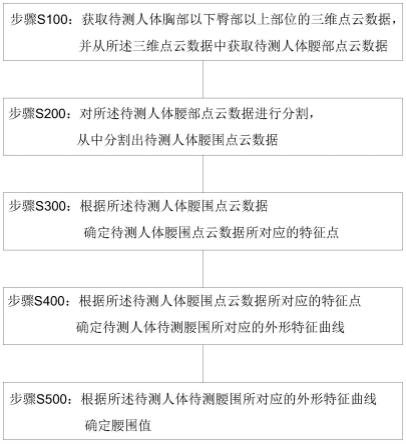
5.本发明解决其技术问题所采用的技术方案是:一种基于线结构光点云三维建模的人体腰围获取方法,包括人体腰围获取方法,所述人体腰围获取方法包括以下步骤:
6.步骤s100:获取待测人体胸部以下臀部以上部位的三维点云数据,并从所述三维点云数据中获取待测人体腰部点云数据;
7.步骤s200:对所述待测人体腰部点云数据进行分割,从中分割出待测人体腰围点云数据;
8.步骤s300:根据所述待测人体腰围点云数据确定待测人体腰围点云数据所对应的特征点;
9.步骤s400:根据所述待测人体腰围点云数据所对应的特征点确定待测人体待测腰围所对应的外形特征曲线;
10.步骤s500:根据所述待测人体待测腰围所对应的外形特征曲线确定腰围值。
11.所述步骤s200包括以下步骤:
12.步骤s2001:根据获取的待测人体腰部点云数据建立三维点云模型;
13.步骤s2002:使用真实人体数据拟合人体部为宽厚比建立数学模型;
14.步骤s2003:根据数学模型手动分割出待测人体腰围点云数据对应的特征点和特
征曲线,所述特征点包括待测人体腰围点云数据顶点和待测人体腰围点云数据两侧点;
15.步骤s2004:确定待测人体腰围点云数据各个点所对应的局部斜率;
16.步骤s2005:根据各个点所对应的局部斜率将待测人体腰部点云数据分割出待测人体腰围点云数据。
17.所述步骤s2005包括以下步骤:
18.步骤s20051:获取各个点对应的局部斜率变化量;
19.步骤s20052:将各个点对应的局部斜率变化量预设分割阈值进行比较;
20.步骤s20053:将大于预设分割阈值的每个局部斜率变化量所对应的点作为待测人体腰围点云数据中的点。
21.所述步骤s300包括以下步骤:
22.步骤s3001:根据所述待测人体腰围点云数据确定待测人体腰围的顶点;
23.步骤s3002:根据所述待测人体腰围的顶点确定待测人体腰围点云数据对应的两侧点;
24.所述步骤s400包括以下步骤:
25.步骤s4001:根据所述待测人体腰围的顶点及所述待测人体腰围点云数据对应的两侧点确定待测人体待测腰围所对应的外形特征曲线,所述外形特征曲线包括腰围曲线。
26.所述步骤s3002包括以下步骤:
27.步骤s30021:获取待测人体腰围点云数据中各个点的坐标;
28.步骤s30022:获取各个点之间的直线距离值;
29.步骤s30023:根据所述直线距离值确定待测人体腰围点云数据的两侧点。
30.优选地:所述人体腰围获取方法还包括以下步骤:
31.步骤s201:根据所述待测人体腰围点云数据确定所述待测人体待测腰围所对应的外形特征曲线;
32.步骤s202:根据所述外形特征曲线确定待测人体的腰围长度值。
33.与现有技术相比,本发明的有益效果是:
34.本方法可以通过结构光激光对站立不便的卧床病人进行腰部的三维重构从而测量腰围,首先获取待测人体胸部以下臀部以上部位的三维点云数据,并从所述三维点云数据中获取待测人体腰部点云数据,然后对所述待测人体腰部点云数据进行分割,从中分割出待测人体腰围点云数据,接着根据所述待测人体腰围点云数据确定待测人体腰围点云数据所对应的特征点,紧接着根据所述待测人体腰围点云数据所对应的特征点确定待测人体待测腰围所对应的外形特征曲线,最后根据所述待测人体待测腰围所对应的外形特征曲线确定腰围值;
35.另一方面,本发明对待测人体腰部的三维点云数据进行分割,并基于手动分割的腰围三维点云数据的特征点得到待测人体的腰围三维点云数据以及外形特征曲线,以对待测人体的腰围值进行测量,该检测方法具有精度高、效率高、非接触性、适应性强等优点,适用于多种病患的人体腰围测量;
附图说明
36.图1为本发明一种基于线结构光点云三维建模的人体腰围获取方法地流程示意
图;
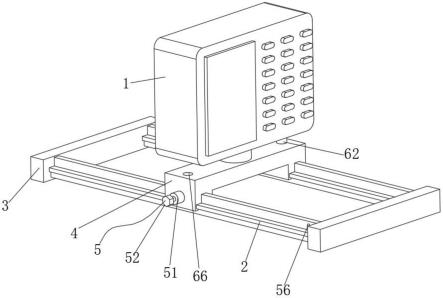
37.图2为本发明实施例提供的线结构光传感器采集待测人体腰围的三维数据的结构示意图;
38.图3为本发明实施例提供的人体腰围点云数据的结构图。
具体实施方式
39.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
40.本实施例提供一种基于线结构光点云三维建模的人体腰围获取方法,包括人体腰围获取方法,所述人体腰围获取方法包括以下步骤,具体如图1所示:
41.步骤s100:获取待测人体胸部以下臀部以上部位的三维点云数据,三维点云数据包括待测人体腰部点云数据,本实施例中的三维点云数据由线结构光传感器采集,如图2和图3所示,线结构光传感器由固定角度安装的相机和线激光器组成,线结构光传感器基于激光三角测量原理获取单个待测人体腰部点云数据,通过编码器提供距离信息,连续获取多个待测人体腰部点云数据,并结合定位位姿即可获得待测人体腰部的三维点云数据,以便后续步骤中根据三维点云数据对待测人体的腰围外形进行检测分析;
42.步骤s200:对所述待测人体腰部点云数据进行分割,从中分割出待测人体腰围点云数据,在一具体实施例中,所述步骤s200包括以下步骤:
43.步骤s2001:根据获取的待测人体腰部点云数据建立三维点云模型;
44.步骤s2002:使用真实人体数据拟合人体部为宽厚比建立数学模型;
45.步骤s2003:根据数学模型手动分割出待测人体腰围点云数据对应的特征点和特征曲线;
46.步骤s2004:确定待测人体腰围点云数据各个点所对应的局部斜率;
47.步骤s2005:根据各个点所对应的局部斜率将待测人体腰部点云数据分割出待测人体腰围点云数据;
48.具体地,所述待测人体腰部点云数据中各个点对应的局部斜率指包含所述待测人体腰部点云数据中各个点的局部区域段的斜率,本实施例在对待测人体腰围点云数据进行分割时,获取待测人体腰部点云数据中各个点对应的局部斜率,并根据各个点对应的局部斜率分割出待测人体腰围点云数据,对于待测人体腰部点云数据s(p1,p2,p3,...,pn),其任意点pi对应的局部斜率可以表示为:
[0049][0050]
其中,(x
i k
,y
i k
)为pi k点坐标,(x
i-k
,y
i-k
)为pi-k点坐标,k为大于1的整数。
[0051]
在一具体实施例中,所述步骤s2005包括以下步骤:
[0052]
步骤s20051:获取各个点对应的局部斜率变化量;
[0053]
步骤s20052:将各个点对应的局部斜率变化量预设分割阈值进行比较;
[0054]
步骤s20053:将大于预设分割阈值的每个局部斜率变化量所对应的点作为待测人
体腰围点云数据中的点;
[0055]
具体地,各个点对应的局部斜率变化量为各个点对应的局部斜率与其邻近的点对应的局部斜率的差值,将各个点对应的局部斜率变化量与预设分割阈值进行比较,当局部斜率变化量大于分割阈值时,将该局部斜率变化量对应的点作为待测人体腰围点云数据,例如,待测人体腰围的三维点云数据为s(p1,p2,p3,...,pn),基于线结构光传感器获取腰部点云数据形状特征,三维点云数据可被分割为待测人体腰围点云数据sw(p1,p2,p3,...,pn),在将三维点云数据分割为待测人体腰围点云数据sw(p1,p2,p3,...,pn)时,可以在三维点云数据s(p1,p2,p3,...,pn)的左侧选取一个对比点,然后以此点为基准,将三维点云数据中的各个点对应的局部斜率与对应的局部斜率相减,从而获得各个点对应的局部斜率变化量,在对局部斜率变化量与预设的分割阈值相比较,其中待测人体腰围点云数据sw(p1,p2,p3,...,pn)满足:
[0056]
sw={pi|abs(r
i-m1)>tandp
i-1
∈sw}
[0057]
其中,ri为三维点云数据中任意点pi对应的局部斜率,m1为对比点对用的局部斜率,t为预设分割阈值;
[0058]
步骤s300:根据所述待测人体腰围点云数据确定待测人体腰围点云数据所对应的特征点,所述特征点包括待测人体腰围点云数据顶点和待测人体腰围点云数据两侧点;
[0059]
所述步骤s300包括以下步骤:
[0060]
步骤s3001:根据所述待测人体腰围点云数据确定待测人体腰围的顶点;
[0061]
步骤s3002:根据所述待测人体腰围的顶点确定待测人体腰围点云数据对应的两侧点;
[0062]
所述步骤s3002包括以下步骤:
[0063]
步骤s30021:获取待测人体腰围点云数据中各个点的坐标;
[0064]
步骤s30022:获取各个点之间的直线距离值;
[0065]
步骤s30023:根据所述直线距离值确定待测人体腰围点云数据的两侧点;
[0066]
具体地,根据局部斜率变化量最大处为顶点pd(xd,yd,zd),由上述步骤可知,待测人体腰围点云数据具有两个两侧点,分别为两侧点pa(xa,ya,za)和两侧点pb(xb,yb,zb),首先以顶点pd(xd,yd,zd)为基准点,遍历待测人体腰围点云数据sw中所有的点云点后,通过找到相距顶点最远的点云点pa(xa,ya,za)后,遍历待测人体腰围点云数据sw中所有的点云点后,通过找到相距pa(xa,ya,za)点最远的点云点pb(xb,yb,zb),pa(xa,ya,za)点与pb(xb,yb,zb)点为待测人体腰围点云数据的两侧点,其中待测人体腰围点云数据各点pi(xi,yi,zi)到其两侧点如pa(xa,ya,za)点组成的距离d的计算公式为:
[0067][0068]
步骤s400:根据所述待测人体腰围点云数据所对应的特征点确定待测人体待测腰围所对应的外形特征曲线,所述步骤s400包括以下步骤:
[0069]
步骤s4001:根据所述待测人体腰围的顶点及所述待测人体腰围点云数据对应的两侧点确定待测人体待测腰围所对应的外形特征曲线,所述外形特征曲线包括腰围曲线;
[0070]
具体地,两侧点的连接线为kdtree的方向向量,通过滤波,减少点云体积,选取合适的阈值,取得若干点,再进行拟合待测人体待测腰围的椭圆特征曲线;
[0071]
步骤s500:根据所述待测人体待测腰围所对应的外形特征曲线确定腰围值。
[0072]
优选地:所述人体腰围获取方法还包括以下步骤:
[0073]
步骤s201:根据所述待测人体腰围点云数据确定所述待测人体待测腰围所对应的外形特征曲线;
[0074]
步骤s202:根据所述外形特征曲线确定待测人体的腰围长度值。
[0075]
综上所述,本方法可以通过结构光激光对站立不便的卧床病人进行腰部的三维重构从而测量腰围,获取待测人体胸部以下臀部以上部位的三维点云数据,并从所述三维点云数据中获取待测人体腰部点云数据,对所述待测人体腰部点云数据进行分割,从中分割出待测人体腰围点云数据,根据所述待测人体腰围点云数据确定待测人体腰围点云数据所对应的特征点,根据所述待测人体腰围点云数据所对应的特征点确定待测人体待测腰围所对应的外形特征曲线,根据所述待测人体待测腰围所对应的外形特征曲线确定腰围值;
[0076]
本发明对待测人体腰部的三维点云数据进行分割,并基于手动分割的腰围三维点云数据的特征点得到待测人体的腰围三维点云数据以及外形特征曲线,以对待测人体的腰围值进行测量,该检测方法具有精度高、效率高、非接触性、适应性强等优点,适用于多种病患的人体腰围测量。
[0077]
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。