1.本实用新型涉及充电桩技术领域,尤其涉及一种机器人充电桩。
背景技术:
2.服务机器人正逐步替代部分人工的工作。目前,已将机器人广泛应用于餐厅、酒店、医院、政府机构等场景中,提供配送、引导等服务。应用于上述场景中的机器人需要克服使用场地的限制,进行无轨道移动。机器人具有电源系统,当电量消耗后,需要对电源系统及时进行充电。在机器人与充电桩的对接过程,机器人与充电桩不可避免的发生刚性碰撞,易导致外壳破损影响美观。
技术实现要素:
3.本实用新型的目的在于克服现有机器人与充电桩对接时易发生刚性碰撞的问题,提供一种机器人充电桩。
4.本实用新型提供了一种机器人充电桩,包括外壳、对接结构、定位标识部和缓冲件,所述外壳包括前壳体和后壳体,所述对接结构和所述定位标识部设置于所述前壳体上;所述缓冲件设置于所述后壳体远离所述前壳体的一侧。
5.可选地,所述前壳体上设置有用于容置机器人导向轮的收纳槽。
6.可选地,所述定位标识部包括识别码和设置在所述前壳体上的多个凹槽,所述识别码贴附于所述凹槽内。
7.可选地,所述凹槽个数为两个,两个所述凹槽分别设置于所述对接结构两侧。
8.可选地,所述后壳体上设置有凸起平台,所述缓冲件设置于所述凸起平台上。
9.可选地,所述缓冲件为缓冲泡棉或弹性橡胶。
10.可选地,所述外壳还包括侧壁,所述侧壁连接所述前壳体和所述后壳体,所述侧壁上设置有散热孔。
11.可选地,所述机器人充电桩还包括充电桩本体和充电指示件;
12.所述外壳还包括上盖,所述上盖、侧壁、前壳体以及后壳体围合形成容纳腔以用于容纳所述充电桩本体;
13.所述上盖上设置有通孔,所述通孔朝向所述充电桩本体的一面设置有所述充电指示件。
14.可选地,所述充电指示件为灯带,所述通孔朝向所述充电桩本体的一面设置有用于显示所述灯带的导光件。
15.可选地,所述对接结构包括防护罩和充电电极,所述防护罩可滑动的设置于所述前壳体上,所述防护罩包括滑动槽,所述充电电极可滑动的设置于所述滑动槽内;
16.其中,所述对接结构在与所述机器人对接时,所述防护罩朝靠近所述后壳体的方向移动,以显露所述充电电极。
17.在本实用新型中,通过在前壳体上设置定位标识部,使得待充电的机器人识别前
壳体的位置,从而进行测距定位。通过在后壳体上设置缓冲件,且缓冲件与墙体抵接,以减缓机器人与对接结构在对桩过程中产生的刚性碰撞从而减轻对外壳的挤压,并增加充电桩本体的稳定性。同时,机器人充电桩在有踢脚线的墙体使用时,通过设置缓冲件填充后壳体与墙体之间的空隙,避免机器人充电桩产生晃动。
附图说明
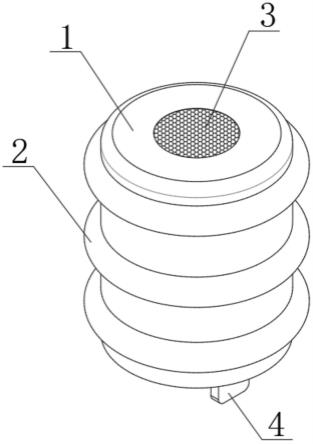
18.图1是本实用新型一实施例提供的一种机器人充电桩的示意图;
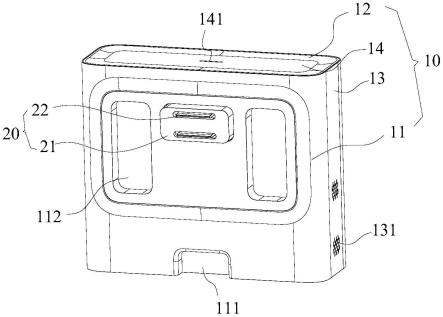
19.图2是本实用新型一实施例提供的一种机器人充电桩的另一角度示意图;
20.图3是本实用新型一实施例提供的一种机器人充电桩的后壳体示意图;
21.图4是本实用新型一实施例提供的一种机器人充电桩的上盖的结构示意图;
22.图5是本实用新型一实施例提供的一种机器人充电桩的上盖的示意图。
具体实施方式
23.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
24.为了说明本实用新型的技术方案,下面通过具体实施例来进行说明。
25.如图1-图5所示,本实用新型的一实施例的一种机器人充电桩,包括外壳10、对接结构20、定位标识部和缓冲件3,所述外壳10包括前壳体11和后壳体12,所述对接结构20和所述定位标识部设置于所述前壳体11上。所述缓冲件3设置于所述后壳体12远离所述前壳体11的一侧,且所述缓冲件3用于与墙体抵接。
26.在本实施例中,通过在前壳体11上设置定位标识部,使得待充电的机器人识别前壳体11的位置,从而进行测距定位。通过在后壳体12上设置缓冲件3,且缓冲件3与墙体抵接,以减缓机器人与对接结构20在对桩过程中对外壳10的挤压,并增加充电桩本体的稳定性。同时,机器人充电桩在有踢脚线的墙体使用时,通过设置缓冲件3填充后壳体12与墙体之间的空隙,避免充电桩本体产生晃动。
27.如图1所示,在本实用新型的一些实施例中,所述前壳体11上设置有用于容置机器人导向轮的收纳槽111,防止机器人与充电桩本体对接过程中因外壳10结构原因造成机器人与外壳10发生碰撞。
28.如图1所示,在本实用新型的一些实施例中,所述定位标识部包括识别码和设置在所述前壳体11上的多个凹槽112,所述识别码贴附于所述凹槽112内,避免识别码在机器人充电时产生磨损。
29.如图1所示,在本实用新型的一些实施例中,所述凹槽112个数为两个,两个所述凹槽112分别设置于所述对接结构20两侧,便于机器人对对接结构20位置进行定位。
30.如图2和图3所示,在本实用新型的一些实施例中,所述后壳体12上设置有凸起平台121,所述缓冲件3设置于所述凸起平台121上。通过设置凸起平台121填充后壳体12与墙体之间的空隙,增加充电桩本体的稳定性。
31.具体地,凸起平台121上设置容纳孔,缓冲件3容置在容纳孔中,且缓冲件3一面凸出于凸起平台121。
32.在本实用新型的一些实施例中,所述缓冲件3为缓冲泡棉或弹性橡胶。
33.如图1和图2所示,在本实用新型的一些实施例中,所述外壳10还包括侧壁13,所述侧壁13连接所述前壳体11和所述后壳体12,所述侧壁13上设置有散热孔131,保证充电桩本体的内部硬件散热均匀。
34.如图1和图2所示,参考图4和图5,在本实用新型的一些实施例中,所述机器人充电桩还包括充电桩本体和充电指示件。
35.所述外壳10还包括上盖14,所述上盖14、侧壁13、前壳体11以及后壳体12围合形成容纳腔以用于容纳所述充电桩本体,具体地,所述充电桩本体包括电源适配器和控制模块。所述控制模块用于控制机器人与所述机器人充电桩之间的电性连接,所述控制模块电性连接所述电源适配器。
36.所述上盖14上设置有通孔141,所述通孔141朝向所述充电桩本体的一面设置有所述充电指示件。充电桩的工作状态通过充电指示件显示。
37.如图5所示,在本实用新型的一些实施例中,所述充电指示件为灯带,所述通孔141朝向所述充电桩本体的一面设置有用于显示所述灯带的导光件142。机器人充电过程中灯带通过颜色指示充电状态,如蓝色是待机,绿色是充电中,红色是充电错误。具体地,导光件142由玻璃或其它透明材质制成。
38.如图1所示,在本实用新型的一些实施例中,所述对接结构20包括防护罩21和充电电极22,所述防护罩21可滑动的设置于所述前壳体11上,所述防护罩21包括滑动槽,所述充电电极22可滑动的设置于所述滑动槽内。
39.其中,所述对接结构在与所述机器人对接时,所述防护罩21朝靠近所述后壳体12的方向移动,以显露所述充电电极22,充电电极22被纳入机器人的对接空间,充电桩本体通过电极耦合完成供应充电。
40.以上实施例仅用以说明本实用新型的技术方案,而非对其限制。尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的精神和范围,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。