1.本实用新型涉及采摘装置技术领域,具体涉及一种水果采摘机器人。
背景技术:
2.随着经济的发展,人们的生活水平都在提高,在智能领域方面有着很大的进步,工业机器人的研发投入比重加大,让机器人投放在简单重复的工作上和危险性较高的工作地方,能够提高劳动效率,还能减少人们在危险的环境中工作。
3.我国是水果生产大国,但是在水果的采摘阶段大多还是使用人工进行采摘。很多水果因为生长在果树的较高部位,在采摘时至少需要一个人在果树上进行作业,还需要另一个人在地面接取果实进行装筐,不仅耗时耗力,效率低下,而且还容易发生危险,极大的提高了劳动成本。而采摘过后还需要人工将水果集中搬运到果园外,操作麻烦,更加耗费时间,因此本实用新型提出一种水果采摘机器人。
技术实现要素:
4.本实用新型的目的在于:为解决现有的人工采摘水果,不仅耗时耗力,而且还容易发生危险,并且在采摘过后还需要人工对水果进行集中装筐运输到果园外部,操作繁琐效率过低的问题,本实用新型提供了一种水果采摘机器人。
5.本实用新型为了实现上述目的具体采用以下技术方案:
6.一种水果采摘机器人,包括车板,所述车板上固定连接有支撑架,所述支撑架上倾斜向上设置有传送带,所述传送带的履带上沿其长度方向阵列安装有多个盛放框,所述支撑架上转动安装有位于传送带顶部一侧的翻斗,所述支撑架上安装有用于驱动翻斗转动的驱动组件,所述车板上可拆卸设置有位于翻斗正下方的收集框,所述车板上固定安装有位于传送带另一侧的阶梯架,所述阶梯架上沿传送带的倾斜方向阵列安装有多个用于采摘水果的机械手。
7.进一步地,所述翻斗包括上端为开口的锥形斗,所述锥形斗上端一侧构造有用于盛放框翻转贯穿的倾倒口,所述锥形斗两侧均固定连接有转动贯穿支撑架的转轴,其中一个所述转轴与驱动组件相连接。
8.进一步地,所述驱动组件包括固定安装在支撑架一侧的支撑板,所述支撑板上固定连接有驱动电机,所述驱动电机的输出轴与其中一个转轴之间通过链条传动连接。
9.进一步地,所述车板上构造有位于翻斗正下方的u型限位框,所述u型限位框内两侧均沿其长度方向构造有滑块,所述收集框底部两侧构造有与滑块滑动配合的滑槽。
10.进一步地,所述机械手包括通过电机转动安装在阶梯架上的底盘,所述底盘固定连接有伸缩臂,所述伸缩臂的另一端转动安装有用于夹持水果的夹爪。
11.进一步地,所述伸缩臂包括固定连接在底盘上的座板,所述座板上通过电机转动安装有转动臂一,所述转动臂一的另一端通过电机转动安装有转动臂二,所述转动臂二另一端通过电机转动安装有转动臂三,所述转动臂三的另一端固定连接有转动电机,所述夹
爪固定连接在转动电机的输出轴上。
12.进一步地,所述夹爪包括固定连接在转动电机输出轴上的安装板,所述安装板的另一端构造有与转动电机输出轴垂直设置的滑轨,所述滑轨上滑动安装有两个相对设置的夹板,所述安装板上固定连接有控制电机,所述控制电机的输出轴转动贯穿安装板且端部固定连接有转板,所述转板的两端均铰接弧形连板,所述夹板的底部均固定连接有设置在转板两侧的连接板,所述弧形连板与连接板的端部相互铰接。
13.进一步地,两个所述夹板的相对面上均构造有橡胶软垫。
14.本实用新型的有益效果如下:
15.1、本实用新型在车板上设置有机械手,通过车板将装置移动至果树旁时,可以使用机械手自动对果树上的水果进行摘取,然后将水果放入到侧面传动带的盛放框内,通过传送带的运输,可以持续不断的将盛放框内的水果倒入到翻斗内,经过一定时间的积蓄可以通过驱动组件将翻斗翻转,使其内部的水果倒入到收集框内,人员只需要将装满水果的收集框运送至果园外再将空的收集框更换上去即可,整体操作方便快捷,省时省力,极大的提高了整体工作效率,降低了劳动成本,并且无需人工在高空作业,保障了人员的安全。
附图说明
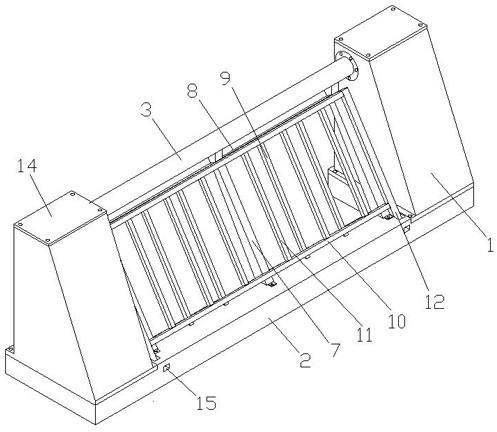
16.图1是本实用新型立体结构图;
17.图2是本实用新型平面俯视图;
18.图3是本实用新型平面侧视图;
19.图4是本实用新型局部立体爆炸图;
20.附图标记:1、车板;101、u型限位框;102、滑块;103、滑槽;2、支撑架;3、传送带;4、盛放框;5、翻斗;501、锥形斗;502、倾倒口;503、转轴;6、驱动组件;601、支撑板;602、驱动电机;7、收集框;8、阶梯架;9、机械手;901、底盘;902、伸缩臂;9021、座板;9022、转动臂一;9023、转动臂二;9024、转动臂三;9025、转动电机;903、夹爪;9031、安装板;9032、滑轨;9033、夹板;9034、控制电机;9035、转板;9036、弧形连板;9037、连接板。
具体实施方式
21.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。
22.如图1所示,本实用新型一个实施例提出的一种水果采摘机器人,包括车板1,车板1上固定连接有支撑架2,支撑架2上倾斜向上设置有传送带3,传送带3的履带上沿其长度方向阵列安装有多个盛放框4,支撑架2上转动安装有位于传送带3顶部一侧的翻斗5,支撑架2上安装有用于驱动翻斗5翻转转动的驱动组件6,车板1上可拆卸设置有位于翻斗5正下方的收集框7,车板1上固定安装有位于传送带3另一侧的阶梯架8,阶梯架8上沿传送带3的倾斜方向阵列安装有多个用于采摘水果的机械手9,通过设置车板1,可以使装置移动至需要采摘的果树旁,然后通过机械手9的移动对果实进行抓取,无需人工爬到果树上进行采摘,防止发生危险,保障了人员的安全,采摘过后的果实通过机械手9的移动,可以放入到传送带3上的盛放框4内,通过传送带3的运输,可以将盛放框4内的果实持续不断的倾倒入翻斗5中进行暂存,翻斗内的水果达到一定数量后,可以通过驱动组件6将其翻转,使其内部的果实
倾倒入下方的收集框7内,人工只需要将装满果实的收集框7运送至果园外,并将空的收集框7更换到车板1上即可,整体采摘操作简单便捷,省时省力,极大的提高了工作效率,设置多个机械手9同时采摘,可以进一步提高采摘的效率,而设置翻斗5进行中转暂存果实,可以在人员运送收集框与更换收集框的时候,使装置可以继续工作,极大的提高了整体装置的工作效率。
23.如图2-3所示,在一些实施例中,翻斗5包括上端为开口的锥形斗501,锥形斗501上端一侧构造有用于盛放框4翻转贯穿的倾倒口502,锥形斗501两侧均固定连接有转动贯穿支撑架2的转轴503,其中一个转轴503与驱动组件6相连接,通过设置锥形斗501并且其内壁为倾斜状,当果实从盛放框4进入翻斗5的时候,与果实从翻斗5倒入收集框7的时候,都可以使果实倾斜滚动下落,防止果实下落时产生过大的撞击力从而造成损坏,增加装置的实用性,而设置倾倒口502一方面可以方便盛放框4的翻转进入,另一方面也可以方便翻斗5倾倒果实时使果实能够顺利的进入到收集框7内。
24.如图1所示,在一些实施例中,驱动组件6包括固定安装在支撑架2一侧的支撑板601,支撑板601上固定连接有驱动电机602,驱动电机602的输出轴与其中一个转轴503之间通过链条传动连接,驱动电机602通过链条带动转轴503进行转动,从而可以带动锥形斗501进行自动翻转,无需人工操作,节省人力,并且驱动电机602具有自锁功能,可以对锥形斗501的位置进行限位固定,防止其发生倾斜从而使盛放框4无法将果实倒入到其中,增加装置的实用性。
25.如图2-3所示,在一些实施例中,车板1上构造有位于翻斗5正下方的u型限位框101,u型限位框101内两侧均沿其长度方向构造有滑块102,收集框7底部两侧构造有与滑块102滑动配合的滑槽103,通过设置u型限位框101可以通过其内部的滑块102与收集框7上的滑槽进行插合,从而对收集框7进行定位,防止翻斗5在倾倒果实时发生外漏,增加装置的安全性。
26.如图1所示,在一些实施例中,机械手9包括通过电机转动安装在阶梯架8上的底盘901,底盘901固定连接有伸缩臂902,伸缩臂902的另一端转动安装有用于夹持水果的夹爪903,通过将底盘901转动设置在阶梯架8上,可以将实现机械手9的整体转动,从而方便将摘取后的水果移动至传送带3上的盛放框4内,而设置伸缩臂902则是用于可以对不同位置的果实进行摘取,转动设置的夹爪903可以在夹住果实时发生转动,从而使果实与果树产生分离,便于摘取。
27.如图4所示,在一些实施例中,伸缩臂902包括固定连接在底盘901上的座板9021,座板9021上通过电机转动安装有转动臂一9022,转动臂一9022的另一端通过电机转动安装有转动臂二9023,转动臂二9023另一端通过电机转动安装有转动臂三9024,转动臂三9024的另一端固定连接有转动电机9025,夹爪903固定连接在转动电机9025的输出轴上,通过设置转动臂一9022、转动臂二9023、转动臂三9024,可以增加伸缩臂902的伸缩长度与自动度,更便于对果实进行摘取。
28.如图4所示,在一些实施例中,夹爪903包括固定连接在转动电机9025输出轴上的安装板9031,安装板9031的另一端构造有与转动电机9025输出轴垂直设置的滑轨9032,滑轨9032上滑动安装有两个相对设置的夹板9033,安装板9031上固定连接有控制电机9034,控制电机9034的输出轴转动贯穿安装板9031且端部固定连接有转板9035,转板9035的两端
均铰接弧形连板9036,夹板9033的底部均固定连接有设置在转板9035两侧的连接板9037,弧形连板9036与连接板9037的端部相互铰接,在对果实进行夹取时,可以通过控制电机9034带动转板9035进行转动,从而使转板9035的两端通过弧形连板9036带动两个夹板9033相互靠近,实现对果实的夹持,再通过转动电机9025的转动可以带动整个夹爪903进行转动,从而使果实与果树脱离,防止果实在摘取时受到碰撞,保证了果实的完整性,增加了装置的实用性。
29.如图4所示,在一些实施例中,两个夹板9033的相对面上均构造有橡胶软垫,用于夹持果实时产生软性碰撞,防止硬性碰撞而损伤果实。
30.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本实用新型。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本实用新型的精神或范围的情况下,在其它实施例中实现。因此,本实用新型将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。