技术特征:
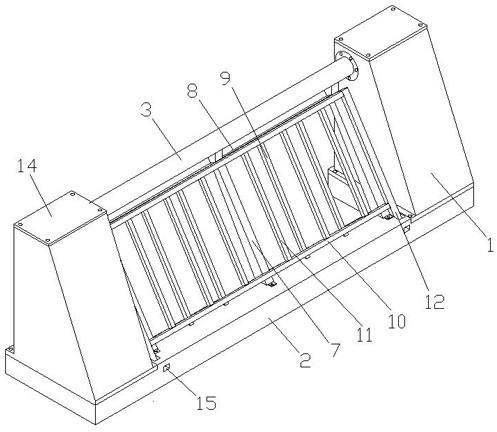
1.一种水果采摘机器人,包括车板(1),其特征在于,所述车板(1)上固定连接有支撑架(2),所述支撑架(2)上倾斜向上设置有传送带(3),所述传送带(3)的履带上沿其长度方向阵列安装有多个盛放框(4),所述支撑架(2)上转动安装有位于传送带(3)顶部一侧的翻斗(5),所述支撑架(2)上安装有用于驱动翻斗(5)翻转转动的驱动组件(6),所述车板(1)上可拆卸设置有位于翻斗(5)正下方的收集框(7),所述车板(1)上固定安装有位于传送带(3)另一侧的阶梯架(8),所述阶梯架(8)上沿传送带(3)的倾斜方向阵列安装有多个用于采摘水果的机械手(9)。2.根据权利要求1所述的一种水果采摘机器人,其特征在于,所述翻斗(5)包括上端为开口的锥形斗(501),所述锥形斗(501)上端一侧构造有用于盛放框(4)翻转贯穿的倾倒口(502),所述锥形斗(501)两侧均固定连接有转动贯穿支撑架(2)的转轴(503),其中一个所述转轴(503)与驱动组件(6)相连接。3.根据权利要求2所述的一种水果采摘机器人,其特征在于,所述驱动组件(6)包括固定安装在支撑架(2)一侧的支撑板(601),所述支撑板(601)上固定连接有驱动电机(602),所述驱动电机(602)的输出轴与其中一个转轴(503)之间通过链条传动连接。4.根据权利要求1所述的一种水果采摘机器人,其特征在于,所述车板(1)上构造有位于翻斗(5)正下方的u型限位框(101),所述u型限位框(101)内两侧均沿其长度方向构造有滑块(102),所述收集框(7)底部两侧构造有与滑块(102)滑动配合的滑槽(103)。5.根据权利要求1所述的一种水果采摘机器人,其特征在于,所述机械手(9)包括通过电机转动安装在阶梯架(8)上的底盘(901),所述底盘(901)固定连接有伸缩臂(902),所述伸缩臂(902)的另一端转动安装有用于夹持水果的夹爪(903)。6.根据权利要求5所述的一种水果采摘机器人,其特征在于,所述伸缩臂(902)包括固定连接在底盘(901)上的座板(9021),所述座板(9021)上通过电机转动安装有转动臂一(9022),所述转动臂一(9022)的另一端通过电机转动安装有转动臂二(9023),所述转动臂二(9023)另一端通过电机转动安装有转动臂三(9024),所述转动臂三(9024)的另一端固定连接有转动电机(9025),所述夹爪(903)固定连接在转动电机(9025)的输出轴上。7.根据权利要求5所述的一种水果采摘机器人,其特征在于,所述夹爪(903)包括固定连接在转动电机(9025)输出轴上的安装板(9031),所述安装板(9031)的另一端构造有与转动电机(9025)输出轴垂直设置的滑轨(9032),所述滑轨(9032)上滑动安装有两个相对设置的夹板(9033),所述安装板(9031)上固定连接有控制电机(9034),所述控制电机(9034)的输出轴转动贯穿安装板(9031)且端部固定连接有转板(9035),所述转板(9035)的两端均铰接弧形连板(9036),所述夹板(9033)的底部均固定连接有设置在转板(9035)两侧的连接板(9037),所述弧形连板(9036)与连接板(9037)的端部相互铰接。8.根据权利要求7所述的一种水果采摘机器人,其特征在于,两个所述夹板(9033)的相对面上均构造有橡胶软垫。
技术总结
本实用新型公开了一种水果采摘机器人,涉及采摘装置技术领域。本实用新型包括车板,所述车板上固定连接有支撑架,所述支撑架上倾斜向上设置有传送带,所述传送带的履带上沿其长度方向阵列安装有多个盛放框,所述支撑架上转动安装有位于传送带顶部一侧的翻斗,所述支撑架上安装有用于驱动翻斗转动的驱动组件,所述车板上可拆卸设置有位于翻斗正下方的收集框,所述车板上固定安装有位于传送带另一侧的阶梯架,所述阶梯架上沿传送带的倾斜方向阵列安装有多个用于采摘水果的机械手。本实用新型通过机械手自动摘取水果,避免了人工采摘发生坠落的危险保障了人身安全,增加了摘取效率,节省时间和成本。省时间和成本。省时间和成本。
技术研发人员:杨帆 王园园
受保护的技术使用者:商洛学院
技术研发日:2022.02.23
技术公布日:2022/8/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。