1.本实用新型属于锯片加工设备领域,尤其涉及一种机械手组件。
背景技术:
2.在加工处理片状锯片时,锯片加工好之后需要卸下再安装新的待处理锯片,现有装置对于锯片的装配不便,效率较低。
3.因此,针对以上现状,迫切需要开发一种通过装配座的特殊结构限定,以及气缸、驱动机构等结构的配合设置,实现了锯片的平面内转动、转移以及径向的装配,自动化程度高的机械手组件,以克服当前实际应用中的不足。
技术实现要素:
4.本实用新型实施例的目的在于提供一种机械手组件,旨在解决现有装置对于锯片的装配不便,效率较低的问题。
5.本实用新型实施例是这样实现的,一种机械手组件,包括立架,还包括:装配座,所述装配座的一端安装固定有手臂,手臂远离装配座的一端设有用于对锯片进行夹紧固定的手爪;安装板,所述装配座远离手臂的一端安装于安装板上,安装板远离装配座的一端安装固定有滑杆,滑杆和立架配合滑动连接,所述立架上还安装固定有气缸,气缸的输出端和滑杆同步连接,所述气缸用于通过滑杆、安装板和装配座驱动手臂移动;驱动机构,所述驱动机构安装固定于立架上,且所述驱动机构用于在不影响手臂移动的同时通过装配座驱动手臂转动;分片磁铁组,所述立架上还安装固定有固定板,固定板上周向分布安装有多个分片磁铁组,多个分片磁铁组配合工作对锯片进行分片,多个分片磁铁组的中心位置于固定板上还安装固定有用于锯片挂置的挂片杆。
6.进一步的技术方案,所述装配座包括有转动块和传动杆,所述传动杆设有两根,两根所述传动杆的一端安装固定有手臂,两根所述传动杆的另一端安装固定有转动块,且所述转动块转动安装于安装板上。
7.进一步的技术方案,所述驱动机构包括有驱动轮和步进电机,所述步进电机安装固定于立架上,驱动轮配合滑动安装于两根所述传动杆上,且所述步进电机和驱动轮通过皮带传动配合连接。
8.进一步的技术方案,所述驱动轮还与立架转动连接。
9.进一步的技术方案,所述滑杆、气缸和传动杆互相平行设置,所述气缸用于驱动滑杆、安装板、转动块、传动杆和手臂构成的整体相对驱动轮移动位置。
10.进一步的技术方案,所述固定板为y形板,所述立架上还安装固定有用于悬挂锯片的挂杆,所述挂杆、分片磁铁组、手臂和挂片杆均位于立架的同一侧。
11.进一步的技术方案,多个所述分片磁铁组配合工作将锯片等距离分隔开来。
12.进一步的技术方案,所述手爪为带有感应器的电磁铁。
13.进一步的技术方案,所述手爪为带有距离感应器的电磁铁。
14.本实用新型实施例提供的一种机械手组件,通过装配座的特殊结构限定,以及气缸、驱动机构等结构的配合设置,实现了锯片的平面内转动、转移以及径向的装配,自动化程度高。
附图说明
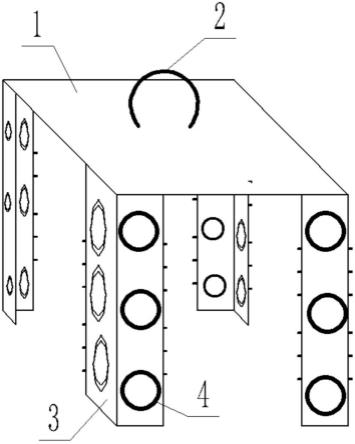
15.图1为本实用新型实施例提供的机械手组件的前视立体结构示意图;
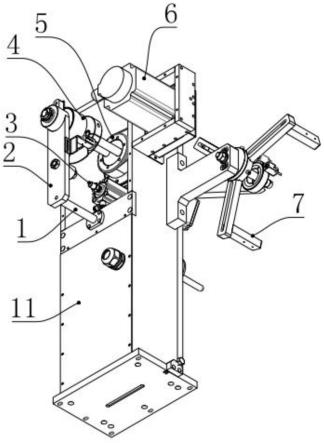
16.图2为本实用新型实施例提供的机械手组件的后视立体结构示意图;
17.图3为图2的主视结构示意图;
18.图4为图2的左视结构示意图;
19.图5为图2的俯视结构示意图。
20.图中:1-滑杆,2-安装板,3-气缸,4-装配座,5-驱动轮,6-步进电机,7-分片磁铁组,8-挂片杆,9-手臂,10-手爪,11-立架。
具体实施方式
21.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
22.以下结合具体实施例对本实用新型的具体实现进行详细描述。
23.如图1-图5所示,为本实用新型一个实施例提供的一种机械手组件,包括立架11,还包括:
24.装配座4,所述装配座4的一端安装固定有手臂9,手臂9远离装配座4的一端设有用于对锯片进行夹紧固定的手爪10;
25.安装板2,所述装配座4远离手臂9的一端安装于安装板2上,安装板2远离装配座4的一端安装固定有滑杆1,滑杆1和立架配合滑动连接,所述立架11上还安装固定有气缸3,气缸3的输出端和滑杆1同步连接,所述气缸3用于通过滑杆1、安装板2和装配座4驱动手臂9移动;
26.驱动机构,所述驱动机构安装固定于立架11上,且所述驱动机构用于在不影响手臂9移动的同时通过装配座4驱动手臂9转动;
27.分片磁铁组7,所述立架11上还安装固定有固定板,固定板上周向分布安装有多个分片磁铁组7,多个分片磁铁组7配合工作对锯片进行分片(优选为等距离分隔锯片),多个分片磁铁组7的中心位置于固定板上还安装固定有用于锯片挂置的挂片杆8。
28.作为本实用新型的一种优选实施例,所述装配座4包括有转动块和传动杆,所述传动杆设有两根,两根所述传动杆的一端安装固定有手臂9,两根所述传动杆的另一端安装固定有转动块,且所述转动块转动安装于安装板2上。
29.作为本实用新型的一种优选实施例,所述驱动机构包括有驱动轮5和步进电机6,所述步进电机6安装固定于立架11上,驱动轮5配合滑动安装于两根所述传动杆上,且所述步进电机6和驱动轮5通过皮带传动配合连接。具体的,皮带传动可以为皮带和带轮,即带轮安装固定于步进电机6的输出轴上,带轮通过皮带和驱动轮5连接,以此实现皮带传动,具体不作限定。为了提升驱动轮5的稳定性,所述驱动轮5还与立架11转动连接,这样可避免两根
传动杆移动时对驱动轮5的稳定性造成影响。
30.作为本实用新型的一种优选实施例,所述滑杆1、气缸3和传动杆互相平行设置,便于通过气缸3带动传动杆稳定的移动。具体的,所述气缸3用于驱动滑杆1、安装板2、转动块、传动杆和手臂9构成的整体相对驱动轮5移动位置。
31.作为本实用新型的一种优选实施例,所述固定板为y形板,所述立架11上还安装固定有用于悬挂锯片的挂杆(未示出),所述挂杆、分片磁铁组7、手臂9和挂片杆8均位于立架11的同一侧,便于锯片的挂置,使用方便。
32.作为本实用新型的一种优选实施例,所述手爪10优选为带有感应器(优选为距离感应器)的电磁铁,可以完成吸附抓取。
33.该机械手组件,使用时,手臂9装配固定在装配座4上,装配座4是由转动块(可拆卸)配合两根传动杆组成,手臂9固定装配在传动杆末端,传动杆外围套装有驱动轮5,步进电机6和驱动轮5通过皮带传动配合连接;安装板2通过一个滑杆1与立架11滑动连接,装配座4的转动块转动安装在安装板2上,气缸3的输出端和滑杆1同步连接;立架11一侧安装有分片磁铁组7,分片磁铁组7阵列分布在y形的固定板上,y形的固定板中心固定有挂片杆8,立架11上还安装固定有用于悬挂锯片的挂杆(未示出)。
34.加工时,分片磁铁组7将锯片分片(即通过磁力分离各锯片,便于手爪夹取吸附)后,手臂9末端的手爪10将锯片吸附,转动到加工位置加工后释放,加工完成后再吸附锯片,转动到挂杆处放置。
35.气缸3通过滑杆1可以推动安装板2和装配座4同步移动,步进电机6通过驱动轮5可以实现手臂9的摆动,这样配合可以完成锯片的平面内转动、转移以及径向的装配,手爪10可以为带有感应器的电磁铁,可以完成吸附抓取,自动化程度高。
36.另外,对所述气缸3、步进电机6、分片磁铁组7和手爪10的控制采用现有技术中公开的plc控制器即可,plc控制器、气缸3、步进电机6、分片磁铁组7和手爪10的具体型号及电路连接不作具体限定,在实际应用时可灵活设置。
37.涉及到的电路、电子元器件和模块均为现有技术,本领域技术人员完全可以实现,无需赘言,本实用新型保护的内容也不涉及对于软件和方法的改进。
38.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。