1.本发明属于低速风洞试验技术领域,具体涉及一种基于前视反馈的全机模型阵风载荷减缓风洞试验方法。
背景技术:
2.阵风,又称突风(gust)或大气湍流,是大气中一种强度较大的确定性风扰动。当飞行器遭遇阵风时,机体会产生附加的非定常气动力与力矩,从而对飞行器飞行性能产生不利影响。现代民用飞机,如大型客机,强调经济性、舒适性、安全性、可靠性,要求具有较高的气动效率和较低的结构重量,通常采用大展弦比机翼,在结构材料上大量使用复合材料,飞机机翼具有较大的柔性,因此飞机对阵风响应更加敏感,阵风载荷,特别是垂直离散阵风载荷,经常成为飞行载荷最严重的情况,对大型客机的舒适性、安全性、经济性、可靠性带来严重影响。当飞机遭遇中低强度的阵风带来的非定常气动载荷会造成飞机的颠簸,给乘客带来紧张感,降低民用飞机的舒适性,甚至导致乘客的人身伤害;当飞机遭遇高强度的非定常气动载荷时,飞机局部过载可达2.5g以上,这会给飞机结构带来破坏或者产生疲劳裂纹,影响飞机的使用寿命,对飞机的安全性和可靠性带来较大影响,民用飞机对阵风载荷造成的疲劳损伤极为敏感,阵风载荷谱是飞机结构寿命可靠性设计的重要科学依据。由于阵风载荷问题,为了保证飞机的强度,需要对飞机结构进行加强,导致飞机重量增加,进而影响飞机的经济性。
3.国内外民用飞机适航条列对于阵风载荷做出了明确的规定。中国运输类飞机适航标准(ccar-25-r4)和美国航空管理条例(far-25)都对阵风载荷设计准则给出了相应规定。准确预测阵风载荷是飞机设计阶段必须进行的一项重要工作。我国大型民用飞机研制对发展先进的大型高低速风洞阵风试验技术提出了迫切需求。除了飞机强度设计所需的阵风载荷预测需求,还需要对阵风载荷减缓技术进行验证。
4.目前,阵风载荷及阵风载荷减缓研究多采取计算仿真的方法开展,相关试验研究主要在风洞中开展一些探索性的初步研究工作,现有的风洞阵风载荷减缓试验,多是采用阵风扰流到达模型传感器后再输出给控制系统进行舵面偏转,导致由于控制舵机信号时间滞后和控制面偏角速率受限导致减缓效果变差的,无法快速实现阵风载荷减缓;此外,以往风洞阵风载荷减缓试验模型主要采用机翼部件或半翼展模型,难以真实的反应飞机遭遇阵风时机翼、升降舵、发动机短舱及机身等全机多部件过载情况;另一方面,机翼部件或半翼展模型阵风载荷减缓试验一般只采用襟翼或副翼进行控制,无法进行襟翼与方向舵组合偏转,进而实现模型的姿态控制、刚体模态、弹性体模态及刚弹混合模态的阵风减缓控制。
技术实现要素:
5.为了解决上述问题,本发明的目的是提供一种基于前视反馈的全机模型阵风载荷减缓风洞试验方法,可在阵风扰动到达模型之前获得阵风扰动信息,提前启动模型舵面偏转进行阵风载荷减缓控制,解决了阵风载荷减缓风洞试验中由于控制舵机信号时间滞后和
控制面偏角速率受限导致控制效果变差的问题,可快速实现阵风减缓。
6.本发明主要通过下述技术方案得以实现:一种基于前视反馈的全机模型阵风载荷减缓风洞试验方法,如下,将全机模型安装在模型支撑装置上,将阵风前视测量探头安装在距全机模型前方一定距离的阵风前视测量探头支撑架上,再将传感器组与采集系统连接,所述的传感器组包括应变片、陀螺仪、光栅尺及加速度计;
7.正式试验前,首先启动风洞风速,待风速达到预设值后,开启阵风发生器装置,发生器叶片按照指定的摆动角度、摆动频率及波形运动,当阵风扰流到达阵风前视测量探头时,阵风前视测量探头将获得的阵风信息传递到信号接收与转换盒中,由信号接收与转换盒解算出阵风的扰动量,此时观察到全机模型在阵风的作用下沉浮和俯仰运动幅度较大,布置在全机模型上的各传感器的测量值变化较大,采用数据采集与舵面偏转控制计算驱动舵面偏转,通过对测量阵风扰动的幅值和频率进行分析,测试阵风减缓襟翼及升降舵的舵面所需的偏转角度,记录全机模型沉浮与俯仰运动稳定、且传感器数值变化较小时的舵面偏转角度,采用建立的阵风载荷减缓方程及多次测量结果获得了阵风扰动量与舵面偏转角度的关系式;
8.正式试验时,重新开启风洞风速和阵风发生器,首先采集全机模型舵面无偏转的数据,之后将阵风前视测量探头获得的阵风扰动信息由信号接收与转换盒解算出阵风的扰动量,依据之前建立的舵面偏转角度与阵风扰动量关系,解算出此时全机模型所需的舵面偏角,并由数据采集与舵面偏转控制计算机发出指令驱动舵面偏转相应的角度,这时全机模型沉浮和俯仰运动稳定在某个固定的范围内,阵风扰动得到有效抑制,采集应变片、陀螺仪、光栅尺和加速度传感器的数据,与之前舵面无偏转获得的值进行差量计算,即得到阵风载荷减缓量。
9.进一步的,根据襟翼和升降舵操纵面的组合偏转,产生直接升力来抵消阵风产生的气动力及力矩增量,建立的所述的阵风载荷减缓方程如下:
[0010][0011]
式(1)中,l
α
是升力对攻角的导数,lq是升力对俯仰角速率的导数,lf是襟翼升力增量,δf是襟翼偏角,le是升降舵升力增量,δe升降舵偏角,v是来流风速,wg是参考点垂直阵风速度,是参考点阵风速度变化率,m
α
是俯仰力矩对攻角的导数,mq是俯仰力矩对俯仰角速率的导数,mf是襟翼俯仰力矩增量,me是升降舵俯仰力矩。
[0012]
由于襟翼布置在参考点附近,其舵偏产生的俯仰力矩可忽略,即:
[0013]
mfδf≈0
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0014]
对于本方法采用的常规布局全机模型:
[0015][0016]
通过多次风洞内数据测量结果,并联合式(2)与式(3)得到舵面偏转角度与阵风扰动量关系式:
[0017][0018]
式(4)中,
[0019]
k1为开环阵风减缓控制器、阵风幅值到襟翼偏度的增益,
[0020]
k2为开环阵风减缓控制器、阵风幅值到升降舵偏度的增益,
[0021]
k3为开环阵风减缓控制器、阵风幅值变化率到升降舵偏度的增益,
[0022]
具体表达形式如下:
[0023][0024]
本发明的有益效果及优点如下:本发明通过前视反馈阵风扰动测量及模型多操纵面的控制方式,采用全机模型试验能更加真实的反应飞机遭遇阵风的情况,实现了模型刚体模态、弹性体模态、刚弹混合模态的阵风减缓控制方式,较好的控制了模型姿态,翼根弯矩载荷的最大减缓幅度达50%,本发明快速有效的降低了飞机模型的阵风载荷,减缓控制效果显著。
附图说明:
[0025]
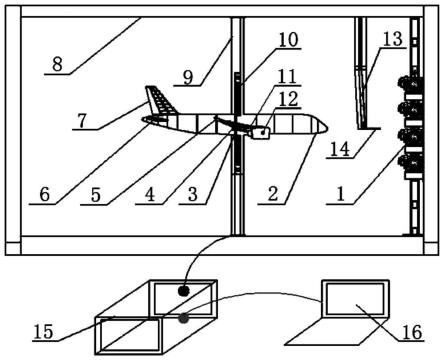
图1为本发明试验原理示意图。
[0026]
图2为本发明试验原理前视图。
[0027]
图3为本发明阵风载荷减缓控制示意图。
[0028]
图4为本发明控制律框图。
[0029]
图5为翼根弯矩减缓试验效果图。
[0030]
其中,1、阵风发生器,2、机头加速度传感器,3、陀螺仪,4、迎角传感器,5、翼尖加速度传感器,6、升降舵加速度传感器,7、方向舵加速度传感器,8、风洞,9、模型支撑装置,10、光栅尺,11、翼根应变片,12、发动机短舱加速度传感器,13、阵风前视测量探头支撑架,14、阵风前视测量探头,15、信号接收与转换盒,16、数据采集与舵面偏转控制计算机,17、发生器叶片支撑a,18、发生器叶片支撑b。
具体实施方式:
[0031]
下面根据说明书附图举例对本发明做进一步的说明:
[0032]
实施例1
[0033]
如图1-3所示,一种基于前视反馈的全机模型阵风载荷减缓风洞试验方法,包括:
[0034]
步骤1、安装阵风发生器、全模型阵风载荷减缓试验模型支撑装置和阵风前视测量探头支撑架;
[0035]
步骤2、将全模型安装在模型支撑装置上,并安装阵风前视测量探头;
[0036]
步骤3、将在机身梁靠近模型重心位置处安装倾角传感器和角速率陀螺,分别测量俯仰角和俯仰角速率;分别在左/右机翼翼尖、左/右发动机短舱(短舱梁前缘)、机头、模型重心和机身后体安装加速度传感器;在左/右机翼根部,粘贴用于测量翼根弯矩应变片;将上述传感器安装、调试完毕,并与信号接收与转换盒相连;
[0037]
步骤4、正式试验前,首先启动风洞风速,待风速达到预设值后,开启阵风发生器装置,发生器叶片按照指定的摆动角度、摆动频率及波形运动;
[0038]
步骤5、当阵风扰流到达阵风前视测量探头时,阵风前视测量探头将获得的阵风信息传递到信号接收与转换盒中,由信号接收与转换盒解算出阵风的扰动量,此时可观察到模型在阵风的作用下沉浮和俯仰运动幅度较大,布置在模型上的应变片、陀螺仪、光栅尺及加速度传感器的测量值变化也较大,采用数据采集与舵面偏转控制计算机驱动舵面偏转,通过对测量阵风扰动的幅值和频率进行分析,测试阵风减缓襟翼及升降舵的舵面所需的偏转角度,记录模型沉浮与俯仰运动稳定、且传感器数值变化较小时的舵面偏转角度,采用建立的阵风载荷减缓方程及多次测量结果获得了阵风扰动量与舵面偏转角度的关系式;
[0039]
步骤6、根据襟翼和升降舵操纵面的组合偏转,产生直接升力来抵消阵风产生的气动力及力矩增量,建立的阵风载荷减缓方程如下:
[0040][0041]
式(1)中,l
α
是升力对攻角的导数,lq是升力对俯仰角速率的导数,lf是襟翼升力增量,δf是襟翼偏角,le是升降舵升力增量,δe升降舵偏角,v是来流风速,wg是参考点(机翼气动中心)垂直阵风速度,是参考点阵风速度变化率,m
α
是俯仰力矩对攻角的导数,mq是俯仰力矩对俯仰角速率的导数,mf是襟翼俯仰力矩增量,me是升降舵俯仰力矩。
[0042]
步骤7、由于襟翼布置在参考点附近,其舵偏产生的俯仰力矩可忽略,即:
[0043]
mfδf≈0
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0044]
步骤8、对于本发明采用的常规布局模型有:
[0045][0046]
步骤9、通过多次风洞内数据测量结果,并联合式(2)与式(3)可得舵面偏转角度与阵风扰动量关系式:
[0047][0048]
式(4)中,k1为开环阵风减缓控制器、阵风幅值到襟翼偏度的增益,k2为开环阵风减缓控制器、阵风幅值到升降舵偏度的增益,k3为开环阵风减缓控制器、阵风幅值变化率到升降舵偏度的增益,具体表达形式如下:
[0049][0050]
步骤10、正式试验时,重新开启风洞风速和阵风发生器,首先采集无舵面无偏转的数据。之后将前视测量探头获得的阵风扰动信息由信号接收与转换盒解算出阵风的扰动量,依据之步骤5~步骤9建立的舵面偏转角度与阵风扰动量关系式,解算出此时模型所需的舵面偏角,并通过数据采集与舵面偏转控制计算机发出指令驱动舵面偏转相应的角度,这时模型沉浮和俯仰运动稳定在某个固定的范围内,阵风扰动得到有效抑制,采集陀螺仪、光栅尺、应变片和加速度传感器的信息,与之前获得的无舵面偏转值进行差量计算,即获得阵风载荷减缓量。
[0051]
如图3所示,为阵风载荷减缓控制示意图,其中l表示阵风测点到设计阵风参考点的距离,v表示来流速度,g
δg
为副翼过载对阵风速度的传递函数。如图4所示,为控制律框图,其中w
gn
机头处垂直阵风速度,x0为前视阵风测量点到参考点的距离,τ为滞后时间常数、τ=x0/v。本发明采用全机模型试验能更加真实的反应飞机遭遇阵风的情况,多操纵面的控制方式可实现刚体模态、弹性体模态、刚弹混合模态的阵风减缓控制,减缓效果更佳。
[0052]
如图5所示,为翼根弯矩减缓试验效果图。当控制律开启既模型舵面偏转时,模型遭受的阵风载荷得到了有效降低,在重点频率3.5hz时阵风载荷减缓量达到了50%以上,快速高效的减小了阵风载荷,减缓控制效果显著。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
