1.本技术涉及实验室自动化工作站技术领域,尤其是涉及一种基于红外线的安全型实验室自动化工作站。
背景技术:
2.目前,实验室全自动工作站可广泛应用于生物工程、dna质粒纯化工作、药物筛选、elisa反应、pcr前处理、dna测序处理、临床检验样品处理及血站系统高通量样品分析工作,该实验室自动化工作站独特的样品处理器确保样品处理工作高度自动化与标准化—拥有微量化反应体系,降低了样品处理成本。其自动化的操作过程减少了人为操作误差,标准化的实验程序可以提高实验的重复性,精准的加样过程使得1μl样品的实验误差不超过3%。
3.相关技术中,实验人员在使用自动化工作站时,操作机械臂进行移动,通过机械臂自动完成耗材的搬运,完成核酸纯化等过程,以及向酶标仪传送微孔板等。
4.针对上述中的相关技术,发明人认为存在有自动化工作站不具有安全防护模块,从而使得实验人员在使用时机械臂进行操作时,机械臂容易与工作站上的试管发生碰撞,从而导致实验无法正常进行。
技术实现要素:
5.为了改善现有自动化工作站不具有安全防护模块的问题,本技术提供一种基于红外线的安全型实验室自动化工作站。
6.本技术提供的一种基于红外线的安全型实验室自动化工作站采用如下的技术方案:
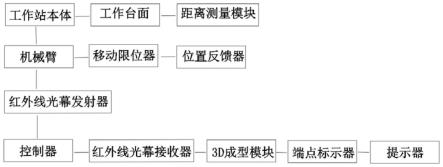
7.一种基于红外线的安全型实验室自动化工作站,包括工作站本体,所述工作站本体上形成有工作台面,且所述工作站本体上设置有机械臂,所述机械臂移动架设在所述工作站本体上,所述工作站本体上架设有红外线光幕发射器,所述红外线光幕发射器朝向所述工作台面的一侧发射红外线光幕;所述工作站本体上设置有控制器,所述控制器与所述红外线光幕发射器之间电连接;所述机械臂上架设有移动限位器,所述移动限位器与所述控制器电连接。
8.可选的,所述控制器内设置有红外线光幕接收器,所述红外线光幕接收器接收所述红外线光幕发射器发出的红外线光幕信号。
9.可选的,所述控制器内设置有3d成型模块,所述3d成型模块接收所述红外线光幕接收器的红外线光幕信号,所述3d成型模块将红外线光幕信号转换为3d立体图像。
10.可选的,所述控制器内设置有端点标示器,所述端点标示器将所述3d成型模块成型后的3d立体图像的若干个高点进行标示使得形成标示点,且所述机械臂上架设有位置反馈器,所述位置反馈器将所述机械臂的位置以红点的方式反馈给控制器。
11.可选的,所述工作站本体上设置有距离测量模块,所述距离测量模块上形成有第一测量点与第二测量点,当所述位置反馈与标示点在同一竖直方向上时,第一测量点与标
示点重合,第二测量点与位置发反馈器重合,随着位置反馈器向靠近标示点移动,第一移动点与第二移动点之间的距离随之减小,所述距离测量模块测量第一测量点与第二测量点之间的距离。
12.可选的,所述移动限位器内设置有安全值a与安全值b,当机械臂距离所述3d成型模块成型后的3d立体图像端点之间的距离在安全值a与安全值b之间时,所述移动限位器则不会发出警报,当所述机械臂距离所述3d成型模块成型后的3d立体图像端点之间的距离小于安全值b时,所述移动限位器则发出警报。
13.综上所述,本技术包括以下至少一种基于红外线的安全型实验室自动化工作站有益技术效果:
14.运用中,实验人员在使用工作站机械臂进行移动,通过机械臂自动完成耗材的搬运,以及向酶标仪传送微孔板,机械臂在移动的过程中,红外线光幕发射器朝向工作台面的一侧发射红外线光幕,红外线光幕传回控制器,控制器通过移动限位器移动机械臂,当机械臂靠近红外线光幕时,移动限位器限制机械臂向光幕靠近,从而使得实验人员在使用时机械臂进行操作时,防止机械臂与工作站上的试管发生碰撞,从而使得实验能够正常进行。
附图说明
15.图1是本实施例主要体现一种基于红外线的安全型实验室自动化工作站框形图。
16.附图标记:1、工作站本体;11、工作台面;12、距离测量模块;2、机械臂;21、移动限位器;22、位置反馈器;3、红外线光幕发射器;4、控制器;41、红外线光幕接收器;42、3d成型模块;43、端点标示器;44、提示器。
具体实施方式
17.为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例的附图,对本技术实施例的技术方案进行清楚、完整地描述。显然,所描述的实施例是本技术的一部分实施例,而不是全部的实施例。基于所描述的本技术的实施例,本领域普通技术人员在无需创造性劳动的前提下所获得的所有其它实施例,都属于本技术保护的范围。
18.除非另作定义,此处使用的技术术语或者科学术语应当为本技术所属领域内具有一般技能的人士所理解的通常意义。本技术专利申请说明书以及权利要求书中使用的“一个”或者“一”等类似词语,不表示数量限制,而是表示存在至少一个。
19.在本技术说明书和权利要求书的描述中,术语“上”、“下”、“水平”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或单元必须具有特定的方向、以特定的方位构造和操作,因此,不能理解为对本技术的限制。
20.以下结合附图1对本技术作进一步详细说明。
21.本技术实施例公开一种基于红外线的安全型实验室自动化工作站。
22.参照图1,一种基于红外线的安全型实验室自动化工作站,包括工作站本体1,工作站本体1上形成工作台面11,且工作站本体1上移动设置有机械臂2,使用前,将试管架放置在工作站本体1上,然后将试管放置在试管架上。工作站本体1上设置有红外线光幕发射器3与控制器4,红外线光幕发射器3与控制器4之间电连接,红外线光幕发射器3朝向工作台面
11的一侧发射红外线光幕,红外线光幕信号传回控制器4,机械臂2上设置有移动限位器21,当机械臂2移动靠近红外线光幕时,移动限位器21限制机械臂2的位置,防止因操作人员的失误导致机械臂2与试管发生碰撞,从而造成实验不能很好的进行。
23.控制器4内设置有红外线光幕接收器41,红外线光幕接收器41接收红外线光幕发射器3发出的红外线光幕信号。使得,红外线光幕发射器3发出的红外线光幕信号能够很好的被红外线光幕接收器41进行接收。
24.红外线光幕发射器3可拆卸固定在工作台面11竖直方向的上侧,使得红外线光幕发射器3发射出的红外线光幕能够投影在工作台面11上,且控制器4内设置有3d成型模块42,3d成型模块42接收红外线光幕接收器41的红外线光幕信号,3d成型模块42将红外线光幕信号转换为3d立体图像,将工作台面11上的试管架与试管以3d立体图像的方式成型在控制器4上。由于试管是透明的,实验人员在实验时,试管架上有若干个试管,实验人员不能准确的找到对应试管,通过以3d立体图像将试管架及试管的立体图像成型在控制器4内,使得实验人员跟容易观察。
25.控制器4内设置有端点标示器43,由于3d成型模块42成型的3d图像高度方向上会有不同的高度差,端点标示器43在3d成型模块42成型3d图像后,在3d图像每一个高度平面上会形成一个标示点,以使得,在使用时,3d图像端点的表面会形成有若干个标示点。机械臂2上还设置有位置反馈器22,位置反馈器22可拆卸固定在机械臂2上,位置反馈器22会将机械壁在工作台本体上的位置以红点的方式反馈给控制器4,机械臂2移动时,红点也会跟着进行移动。
26.控制器4内还设置有提示器44,当反馈器反馈给控制器4的红点与标示点在竖直方向上重合后,提示器44发出提示,当反馈器反馈给控制器4的红点与标示点在竖直方向上错位后,提示器44则不会发出提升,以使得,实验人员通过机械臂2对试管进行操作时,位置的精确性得以提升。
27.工作站本体1上设置有距离测量模块12,距离测量模块12上形成有第一测量点与第二测量点,当位置反馈器22与标示点在同一竖直方向上重合时,第一测量点与标示点重合,第二测量点与位置发反馈器重合,随着位置反馈器22向靠近标示点移动,第一移动点与第二移动点之间的距离随之减小,距离测量模块12测量第一测量点与第二测量点之间的距离。第一测量点与第二测量点之间的距离能够很好的反应给实验人员,使得机械臂2与试管之间的距离更加精确,防止机械臂2与试管之间发生碰撞。
28.为进一步防止机械臂2与试管架上的试管发生碰撞,设计人员改进后,移动限位器21内设置有安全值a与安全值b,且移动限位器21内设置有报警器,当第一移动点与第二移动点之间的距离在安全值a与安全值b之间时,移动限位器21上的报警器则不会发出警报,当第一移动点与第二移动点之间的距离小于安全值b时,移动限位器21上的报警器则发出警报。提示实验人员提升注意力。
29.本技术实施例一种基于红外线的安全型实验室自动化工作站的实施原理为:使用时,将试管架放置在工作台面11上,装有试剂的试管放置在试剂架上,然后红外线光幕发射器3朝向工作台面11的一侧发射红外线光幕,控制器4内的红外线光幕接收器41接收红外线光幕发射器3发出的红外线光幕信号,之后3d成型模块42将红外线光幕信号转换为3d立体图像,随后控制器4内的端点标示器43,将3d成型模块42成型3d图像后,在3d图像每一个高
度平面上形成一个标示点,机械臂2上的位置反馈器22,将机械壁在工作台本体上的位置以红点的方式反馈给控制器4,当反馈器反馈给控制器4的红点与标示点在竖直方向上重合后,提示器44发出提示,当位置反馈器22与标示点在同一竖直方向上重合时,位置反馈器22上的第一测量点与标示点重合,第二测量点与位置发反馈器重合,随着位置反馈器22向靠近标示点的一侧移动,第一移动点与第二移动点之间的距离随之减小,距离测量模块12测量第一测量点与第二测量点之间的距离,当第一移动点与第二移动点之间的距离在安全值a与安全值b之间时,移动限位器21上的报警器则不会发出警报,当第一移动点与第二移动点之间的距离小于安全值b时,移动限位器21上的报警器则发出警报。
30.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。