技术特征:
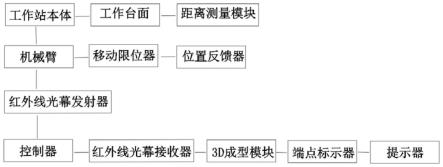
1.一种基于红外线的安全型实验室自动化工作站,包括工作站本体(1),所述工作站本体(1)上形成有工作台面(11),且所述工作站本体(1)上设置有机械臂(2),所述机械臂(2)移动架设在所述工作站本体(1)上,其特征在于:所述工作站本体(1)上架设有红外线光幕发射器(3),所述红外线光幕发射器(3)朝向所述工作台面(11)的一侧发射红外线光幕;所述工作站本体(1)上设置有控制器(4),所述控制器(4)与所述红外线光幕发射器(3)之间电连接;所述机械臂(2)上架设有移动限位器(21),所述移动限位器(21)与所述控制器(4)电连接。2.根据权利要求1所述的一种基于红外线的安全型实验室自动化工作站,其特征在于:所述控制器(4)内设置有红外线光幕接收器(41),所述红外线光幕接收器(41)接收所述红外线光幕发射器(3)发出的红外线光幕信号。3.根据权利要求1所述的一种基于红外线的安全型实验室自动化工作站,其特征在于:所述控制器(4)内设置有3d成型模块(42),所述3d成型模块(42)接收所述红外线光幕接收器(41)的红外线光幕信号,所述3d成型模块(42)将红外线光幕信号转换为3d立体图像。4.根据权利要求1所述的一种基于红外线的安全型实验室自动化工作站,其特征在于:所述控制器(4)内设置有端点标示器(43),所述端点标示器(43)将所述3d成型模块(42)成型后的3d立体图像的若干个高点进行标示使得形成标示点,且所述机械臂(2)上架设有位置反馈器(22),所述位置反馈器(22)将所述机械臂(2)的位置以红点的方式反馈给控制器(4)。5.根据权利要求1所述的一种基于红外线的安全型实验室自动化工作站,其特征在于:所述工作站本体(1)上设置有距离测量模块(12),所述距离测量模块(12)上形成有第一测量点与第二测量点,当所述位置反馈与标示点在同一竖直方向上时,第一测量点与标示点重合,第二测量点与位置发反馈器重合,随着位置反馈器(22)向靠近标示点移动,第一移动点与第二移动点之间的距离随之减小,所述距离测量模块(12)测量第一测量点与第二测量点之间的距离。6.根据权利要求1所述的一种基于红外线的安全型实验室自动化工作站,其特征在于:所述移动限位器(21)内设置有安全值a与安全值b,当机械臂(2)距离所述3d成型模块(42)成型后的3d立体图像端点之间的距离在安全值a与安全值b之间时,所述移动限位器(21)则不会发出警报,当所述机械臂(2)距离所述3d成型模块(42)成型后的3d立体图像端点之间的距离小于安全值b时,所述移动限位器(21)则发出警报。
技术总结
本申请涉及一种基于红外线的安全型实验室自动化工作站,涉及实验室自动化工作站技术领域,其包括工作站本体,所述工作站本体上形成有工作台面,且所述工作站本体上设置有机械臂,所述机械臂移动架设在所述工作站本体上,所述工作站本体上架设有红外线光幕发射器,所述红外线光幕发射器朝向所述工作台面的一侧发射红外线光幕;所述工作站本体上设置有控制器,所述控制器与所述红外线光幕发射器之间电连接;所述机械臂上架设有移动限位器,所述移动限位器与所述控制器电连接。本申请使得实验人员在使用时机械臂进行操作时,防止机械臂与工作站上的试管发生碰撞,从而使得实验能够正常进行的效果。常进行的效果。常进行的效果。
技术研发人员:冯娜娜 申山 张丽娟 陈海琴 吕冲
受保护的技术使用者:上海百翱杰生物科技有限公司
技术研发日:2022.03.10
技术公布日:2022/8/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。