1.本实用新型涉及振动噪声控制技术领域,尤其涉及分布式主动控制系统。
背景技术:
2.主动振动噪声控制是目前低频振动噪声控制研究中的热门话题,该技术通过布置主动执行机构,在目标位置产生与干扰振动/噪声大小相等、相位相反的信号,实现振动/噪声的主动抵消。
3.传统的主动控制系统大都仅对一个目标位置的一种振动噪声进行主动抵消,其它位置的多种振动噪声依旧存在,导致振动噪声主动抵消的整体效果差。
技术实现要素:
4.本实用新型通过提供分布式主动控制系统,解决了现有技术中振动噪声主动抵消的整体效果差的技术问题。
5.本实用新型实施例提供如下技术方案:
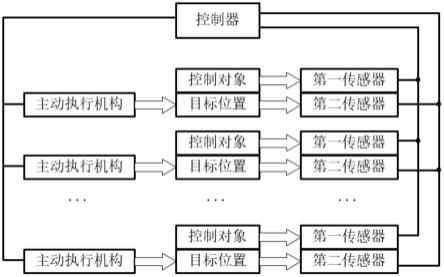
6.一种分布式主动控制系统,包括多个第一传感器、多个第二传感器、控制器和多个主动执行机构;
7.每个控制对象,对应一个所述第一传感器、一个所述第二传感器以及一个所述主动执行机构;
8.多个所述第一传感器的输出端均连接所述控制器,所述第一传感器用于检测对应的所述控制对象在对应的目标位置产生的实际振动噪声信号;
9.多个所述第二传感器的输出端均连接所述控制器,所述第二传感器用于检测对应的所述目标位置处的误差振动噪声信号;
10.多个所述主动执行机构均连接所述控制器,所述控制器用于控制所述主动执行机构在对应的所述目标位置产生目标振动噪声信号,所述误差振动噪声信号为对应的所述实际振动噪声信号与所述目标振动噪声信号的叠加。
11.优选的,所述控制器包括主核、共享内存及多个第一从核;
12.每个控制对象,对应一个所述第一传感器、一个所述第二传感器、一个所述第一从核以及一个所述主动执行机构;
13.多个所述第一传感器和多个所述第二传感器的输出端均连接所述主核,所述主核用于将每个所述实际振动噪声信号和每个所述误差振动噪声信号存储至所述共享内存;
14.所述第一从核用于控制对应的所述主动执行机构产生所述目标振动噪声信号。
15.优选的,所述控制器还包括第二从核。
16.优选的,所述主动执行机构包括功放驱动器和主动执行器;
17.所述功放驱动器的输入端连接所述控制器,所述功放驱动器的输出端连接所述主动执行器的输入端。
18.优选的,多个所述第一传感器和多个所述第二传感器的输出端均经所述处理器连
接所述控制器,多个所述主动执行机构均经所述处理器连接所述控制器。
19.优选的,所述处理器为fpga。
20.本实用新型提供的技术方案,至少具有如下技术效果或优点:
21.本实用新型中对应的第一传感器、第二传感器、主动执行机构构成一个目标位置处一个控制对象的主动抵消系统,可以主动消除此目标位置的一种振动噪声,而多个主动抵消系统可以消除多个目标位置的多种振动噪声,极大地提高了振动噪声主动抵消的整体效果。
附图说明
22.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
23.图1为本实用新型实施例中分布式主动控制系统的一种结构示意图;
24.图2为本实用新型实施例中分布式主动控制系统的另一种结构示意图。
具体实施方式
25.本实用新型实施例通过提供分布式主动控制系统,解决了现有技术中振动噪声主动抵消的整体效果差的技术问题。
26.为了更好的理解本实用新型的技术方案,下面将结合说明书附图以及具体的实施方式对本实用新型的技术方案进行详细的说明。
27.首先说明,本文中出现的术语“和/或”,仅仅是一种描述关联对象的关联关系,表示可以存在三种关系,例如,a和/或b,可以表示:单独存在a,同时存在a和b,单独存在b这三种情况。另外,本文中字符“/”,一般表示前后关联对象是一种“或”的关系。
28.如图1所示,本实施例的分布式主动控制系统包括多个第一传感器、多个第二传感器、控制器和多个主动执行机构;每个控制对象,对应一个第一传感器、一个第二传感器以及一个主动执行机构;多个第一传感器的输出端均连接控制器,第一传感器用于检测对应的控制对象在对应的目标位置产生的实际振动噪声信号;多个第二传感器的输出端均连接控制器,第二传感器用于检测对应的目标位置处的误差振动噪声信号;控制器用于根据每个实际振动噪声信号和对应的误差振动噪声信号生成实际控制信号,将每个实际控制信号发送至对应的主动执行机构;多个主动执行机构均连接控制器,主动执行机构用于根据对应的实际控制信号在对应的目标位置产生目标振动噪声信号,误差振动噪声信号为对应的实际振动噪声信号与目标振动噪声信号的叠加。
29.需要说明的是,本实施例控制器根据每个实际振动噪声信号和对应的误差振动噪声信号生成实际控制信号为本领域的成熟方案,不涉及算法的改进。
30.其中,多个目标位置分别处于一个系统下的不同区域,每个目标位置均具有一个控制对象,每个控制对象会产生不同的振动噪声。实际控制信号用于控制主动执行机构产生目标振动噪声信号,目标振动噪声信号为与实际振动噪声信号相位相反的信号,用于抵消实际振动噪声信号。主动控制的目的是消除误差振动噪声信号,即使误差振动噪声信号
最小。
31.本实施例中,对于对应的第一传感器、第二传感器、主动执行机构和控制对象而言,第一传感器可以检测控制对象在目标位置产生的实际振动噪声信号,第二传感器可以检测目标位置处的误差振动噪声信号,控制器根据此区域的实际振动噪声信号和误差振动噪声信号生成实际控制信号,主动执行机构根据实际控制信号在目标位置产生目标振动噪声信号,可以抵消实际振动噪声信号;对应的第一传感器、第二传感器、主动执行机构构成一个目标位置处一个控制对象的主动抵消系统,可以主动消除此目标位置的一种振动噪声,而多个主动抵消系统可以消除多个目标位置的多种振动噪声,极大地提高了振动噪声主动抵消的整体效果。
32.本实施例中,可以通过在控制器中设置多个控制流程,每个控制流程分别针对每个主动抵消系统计算实际控制信号,实现分布式主动控制,但控制器的多个控制流程之间会相互影响,导致系统稳定性差。
33.为此,如图2所示,本实施例优选控制器包括主核、共享内存及多个第一从核;每个控制对象,对应一个第一传感器、一个第二传感器、一个第一从核以及一个主动执行机构;多个第一传感器和多个第二传感器的输出端均连接主核;主核用于将每个实际振动噪声信号和每个误差振动噪声信号存储至共享内存,从共享内存中读取每个实际控制信号,将每个实际控制信号发送给对应的主动执行机构;第一从核用于从共享内存中读取对应的实际振动噪声信号和误差振动噪声信号,根据实际振动噪声信号和误差振动噪声信号生成实际控制信号,将实际控制信号存储至共享内存。
34.这样对应的第一传感器、第二传感器、第一从核、主动执行机构构成一个目标位置处一个控制对象的主动抵消系统,主核实现数据在传感器与控制器、主动执行机构与控制器之间的统一传递、第一内核实现主动抵消系统的数据计算、共享内存实现所有数据的存储,核间程序独立运行,多个主动抵消系统之间的数据计算互不干扰,实现了独立协调统一的分布式主动控制,提高了主动控制系统的稳定性。
35.如图2所示,本实施例的控制器还包括第二从核;第二从核用于从共享内存中读取目标参数,根据目标参数判断系统是否异常。具体的,目标参数可以包括实际振动噪声信号,第二从核用于根据实际振动噪声信号判断对应的第一传感器是否异常;目标参数还可以包括误差振动噪声信号,第二从核用于根据误差振动噪声信号判断对应的第二传感器是否异常。
36.其中,第一传感器和第二传感器一般具有输出电压范围,如0-5v,超出输出电压范围则认为传感器异常,那么实际振动噪声信号超出了输出电压范围则可认为第一传感器异常,误差振动噪声信号超出了输出电压范围则可认为第二传感器异常。若第一传感器和第二传感器的输出处于正常范围,则可认为第一传感器和第二传感器检测的信号准确。
37.如图2所示,本实施例的主动执行机构包括功放驱动器和主动执行器;功放驱动器的输入端连接控制器,功放驱动器的输出端连接主动执行器的输入端;多个第一传感器和多个第二传感器的输出端均经处理器连接控制器,多个主动执行机构均经处理器连接控制器。处理器可以为fpga。功放驱动器用于将实际控制信号转换为电流信号,主动执行器用于根据电流信号在目标位置产生目标振动噪声信号。处理器用于控制器与传感器之间、控制器与主动执行机构之间的数据缓冲。
38.尽管已描述了本实用新型的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本实用新型范围的所有变更和修改。
39.显然,本领域的技术人员可以对本实用新型进行各种改动和变型而不脱离本实用新型的精神和范围。这样,倘若本实用新型的这些修改和变型属于本实用新型权利要求及其等同技术的范围之内,则本实用新型也意图包含这些改动和变型在内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。