技术特征:
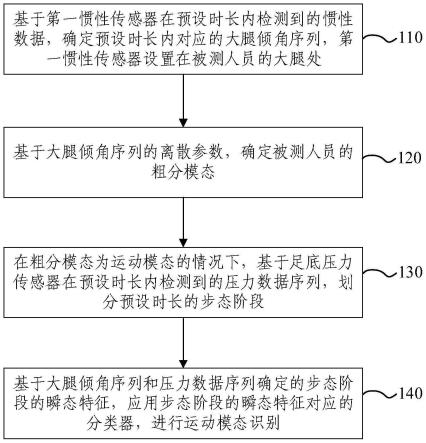
1.一种运动模态识别方法,其特征在于,包括:基于第一惯性传感器在预设时长内检测到的惯性数据,确定所述预设时长内对应的大腿倾角序列,所述第一惯性传感器设置在被测人员的大腿处;基于所述大腿倾角序列的离散参数,确定所述被测人员的粗分模态;在所述粗分模态为运动模态的情况下,基于足底压力传感器在所述预设时长内检测到的压力数据序列,划分所述预设时长的步态阶段;基于所述大腿倾角序列和所述压力数据序列,确定所述步态阶段的瞬态特征,并应用所述步态阶段的瞬态特征对应的分类器,对所述步态阶段的瞬态特征进行运动模态识别。2.根据权利要求1所述的运动模态识别方法,其特征在于,所述基于足底压力传感器在所述预设时长内检测到的压力数据序列,划分所述预设时长的步态阶段,包括:将所述压力数据序列中的各压力数据依次和预设压力阈值进行对比,得到所述各压力数据的对比结果;基于所述压力数据序列中对比结果不同的相邻两压力数据,划分所述预设时长内的步态阶段;所述步态阶段的类别包括摆动阶段和落地阶段,其中,所述摆动阶段为所述步态阶段中的各压力数据均小于或等于所述预设压力阈值,所述落地阶段为所述步态阶段中的各压力数据均大于所述预设压力阈值。3.根据权利要求2所述的运动模态识别方法,其特征在于,所述瞬态特征包括:最大前摆幅时刻、落地时刻、最大后摆幅时刻和单脚全着地时刻;所述基于所述大腿倾角序列和所述压力数据序列,确定所述步态阶段的瞬态特征,包括:若所述步态阶段为摆动阶段,则基于所述大腿倾角序列,确定所述最大前摆幅时刻,并基于所述压力数据序列,确定所述落地时刻;若所述步态阶段为落地阶段,则基于所述大腿倾角序列,确定所述最大后摆幅时刻,并基于所述压力数据序列,确定所述单脚全着地时刻。4.根据权利要求3所述的运动模态识别方法,其特征在于,所述应用所述步态阶段的瞬态特征对应的分类器,对所述步态阶段的瞬态特征进行运动模态识别,包括:若所述步态阶段的瞬态特征为所述单脚全着地时刻,则应用第二惯性传感器,确定足部倾角,并基于所述足部倾角和预设足部倾角阈值,应用所述单脚全着地时刻对应的分类器,进行运动模态识别;所述第二惯性传感器设置在被测人员的脚面处;否则,应用所述步态阶段的瞬态特征对应的分类器,对所述步态阶段的瞬态特征进行运动模态识别。5.根据权利要求1所述的运动模态识别方法,其特征在于,还包括:在所述粗分模态为静态模态的情况下,则应用所述大腿倾角序列的倾角均值和预设静态分类阈值,确定静态模态识别结果。6.根据权利要求1至5中任一项所述的运动模态识别方法,其特征在于,所述基于所述步态阶段对应的分类器,对所述步态阶段的瞬态特征进行运动模态识别之后,还包括:基于历史步态数据中的运动模态类别标签,对所述历史步态数据进行分割,得到步态周期;所述历史步态数据包括所述第一惯性传感器检测到的大腿倾角和所述足底压力传感器检测到的压力数据;
基于所述步态周期和步态模板,确定所述步态周期对应的运动模态类别;所述步态模板包括平地模板、上楼模板和下楼模板;基于所述步态周期中的瞬态特征,以及所述步态周期对应的运动模态类别,确定并更新所述瞬态特征对应分类器的参数。7.根据权利要求6所述的运动模态识别方法,其特征在于,所述基于所述步态周期和步态模板,确定所述步态周期对应的运动模态类别,包括:将所述步态周期中任一步态周期和所述步态模板中的各步态模板分别进行相似度计算,得到所述任一步态周期与所述各步态模板的相似度得分,并基于所述任一步态周期与所述各步态模板的相似度得分,确定所述任一步态周期对应的运动模态类别。8.根据权利要求7所述的运动模态识别方法,其特征在于,所述基于所述任一步态周期与所述各步态模板的相似度得分,确定所述任一步态周期对应的运动模态类别之后,还包括:基于所述任一步态周期与所述各步态模板的相似度得分,确定所述任一步态周期对应的步态模板;若所述任一步态周期与所述任一步态周期对应的步态模板的相似度得分大于预设相似度阈值,则应用所述任一步态周期更新所述任一步态周期对应的步态模板。9.一种运动模态识别装置,其特征在于,包括:倾角确定模块,用于基于第一惯性传感器在预设时长内检测到的惯性数据,确定所述预设时长内对应的大腿倾角序列,所述第一惯性传感器设置在被测人员的大腿处;粗分模块,用于基于所述大腿倾角序列的离散参数,确定所述被测人员的粗分模态;步态划分模块,用于在所述粗分模态为运动模态的情况下,基于足底压力传感器在所述预设时长内检测到的压力数据序列,划分所述预设时长的步态阶段;模态识别模块,从所述大腿倾角序列中确定所述步态阶段的瞬态特征,基于所述步态阶段的瞬态特征对应的分类器,确定运动模态识别结果。10.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至8任一项所述运动模态识别方法。11.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至8任一项所述运动模态识别方法。
技术总结
本发明提供一种运动模态识别方法、装置、电子设备及存储介质,其中方法包括:基于第一惯性传感器在预设时长内检测到的惯性数据,确定预设时长内对应的大腿倾角序列,第一惯性传感器设置在被测人员的大腿处;基于大腿倾角序列的离散参数,确定被测人员的粗分模态;在粗分模态为运动模态的情况下,基于足底压力传感器在预设时长内检测到的压力数据序列,划分预设时长的步态阶段;基于大腿倾角序列和压力数据序列,确定步态阶段的瞬态特征,并应用步态阶段的瞬态特征对应的分类器,对步态阶段的瞬态特征进行运动模态识别。该方法通过少量传感器的数据及两次模态识别,实现了依赖少量传感数据及逐步识别逻辑算法,提高了运算效率和识别准确度。别准确度。别准确度。
技术研发人员:郑恩昊 万嘉诚
受保护的技术使用者:中国科学院自动化研究所
技术研发日:2022.04.20
技术公布日:2022/8/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。