1.本发明涉及电动助力转向系统测试技术领域,尤其涉及一种电动助力转向系统模型及其自动化测试系统、方法。
背景技术:
2.随着汽车智能驾驶技术的发展,电动助力转向系统(electrical power steering,简称eps)得到广泛应用。在智能驾驶车辆的设计开发阶段,针对电动助力转向系统进行性能测试和验证是必不可少的环节,以使其满足智能驾驶控制器在不同工况下的转向扭矩请求,及为转向系统提供辅助扭矩。
3.在现有技术中,对电动助力转向系统的测试和验证方法,大部分采用实车试验方式完成,由于实车测试及传感器协议不公开的局限性,导致测试系统自动化程度低,测试功能覆盖不全面,测试效率低下,且测试过程受场地限制较大,可重复性差,特别是针对驾驶过程中的危险工况、天气和不同道路工况、抑制条件测试和故障诊断的测试,实车测试难以覆盖。
技术实现要素:
4.本发明提供了一种电动助力转向系统模型及其自动化测试系统、方法,以解决现有的转向系统测试系统自动化程度低、测试功能覆盖不全面的问题,有利于提高测试效率。
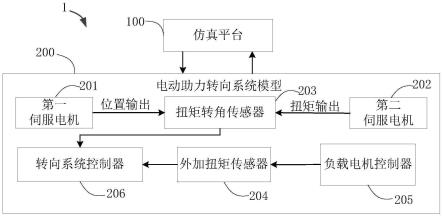
5.根据本发明的一方面,提供了一种电动助力转向系统自动化测试系统,包括:仿真平台和电动助力转向系统模型;所述仿真平台用于根据测试序列模拟测试工况,并对所述电动助力转向系统模型输出转角扭矩控制信号,所述转角扭矩控制信号包括方向盘转角信号、车速信号和方向盘手力矩信号;所述电动助力转向系统模型,包括第一伺服电机、第二伺服电机、扭矩转角传感器、外加扭矩传感器、连接负载电机的负载电机控制器及连接转向电机的转向系统控制器;所述第一伺服电机用于根据所述方向盘转角信号和所述车速信号模拟方向盘转动;所述第二伺服电机用于根据所述方向盘手力矩信号模拟方向盘手力矩值;所述扭矩转角传感器用于采集所述第一伺服电机的模拟偏转角度,并采集所述第二伺服电机输出的模拟手力矩值;所述外加扭矩传感器用于采集所述负载电机与所述转向电机之间的负载力矩;所述转向系统控制器用于将所述模拟偏转角度、所述模拟手力矩值及所述负载力矩上传至所述仿真平台,对所述仿真平台的测试工况进行闭环调节。
6.根据本发明的另一方面,提供了一种电动助力转向系统模型,与上述仿真平台进行数据交互,所述电动助力转向系统模型包括:第一伺服电机、第二伺服电机、扭矩转角传感器、外加扭矩传感器、连接负载电机的负载电机控制器及连接转向电机的转向系统控制器;所述第一伺服电机用于根据所述方向盘转角信号和所述车速信号模拟方向盘转动;所述第二伺服电机用于根据所述方向盘手力矩信号模拟方向盘手力矩值;所述扭矩转角传感器用于采集所述第一伺服电机的模拟偏转角度,并采集所述第二伺服电机输出的模拟手力矩值;所述外加扭矩传感器用于采集所述负载电机与所述转向电机之间的负载力矩;所述
转向系统控制组件将所述模拟偏转角度、所述模拟手力矩值及所述负载力矩发送至所述仿真平台,对所述仿真平台的测试工况进行闭环调节。
7.根据本发明的另一方面,提供了一种电动助力转向系统自动化测试方法,包括:根据测试序列模拟电动助力转向系统模型的测试工况,并对电动助力转向系统模型输出转角扭矩控制信号,所述转角扭矩控制信号包括方向盘转角信号、车速信号和方向盘手力矩信号;采用第一伺服电机根据所述方向盘转角信号和所述车速信号模拟方向盘转动;采用第二伺服电机根据所述方向盘手力矩信号模拟方向盘手力矩值;获取所述第一伺服电机的模拟偏转角度,及所述第二伺服电机输出的模拟手力矩值;获取所述电动助力转向系统模型的负载电机与转向电机之间的负载力矩;根据所述模拟偏转角度、所述模拟手力矩值及所述负载力矩确定目标助力力矩,对测试工况进行闭环调节。
8.本发明实施例的技术方案,设置仿真平台和电动助力转向系统模型,通过仿真平台根据测试序列模拟测试工况,对电动助力转向系统模型进行测试,并对电动助力转向系统模型输出转角扭矩控制信号,该转角扭矩控制信号包括方向盘转角信号、车速信号和方向盘手力矩信号;电动助力转向系统模型设置第一伺服电机、第二伺服电机、扭矩转角传感器、外加扭矩传感器、连接负载电机的负载电机控制器及连接转向电机的转向系统控制器,第一伺服电机根据方向盘转角信号和车速信号模拟方向盘转动;第二伺服电机根据方向盘手力矩信号模拟方向盘手力矩值;扭矩转角传感器用于采集第一伺服电机的模拟偏转角度,并采集第二伺服电机输出的模拟手力矩值;外加扭矩传感器采集负载电机与转向电机之间的负载力矩;转向系统控制器用于将模拟偏转角度、模拟手力矩值及负载力矩上传至仿真平台,对仿真平台的测试工况进行闭环调节,通过方向盘转角和方向盘扭矩仿真及测试序列实现不同工况、不同车速的闭环测试,解决了现有的转向系统测试系统自动化程度低、测试功能覆盖不全面的问题,可自动生成测试报告和日志,便于查验测试结果,有利于扩大测试覆盖度和测试深度,提高测试效率,缩短测试周期,节约测试成本。
9.应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
附图说明
10.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
11.图1是本发明实施例一提供的一种电动助力转向系统自动化测试系统的结构示意图;
12.图2是本发明实施例一提供的一种仿真平台的结构示意图;
13.图3是本发明实施例二提供的一种电动助力转向系统自动化测试系统的结构示意图;
14.图4是本发明实施例二提供的一种上位机系统的结构示意图;
15.图5是本发明实施例三提供的一种电动助力转向系统模型的结构示意图;
16.图6是本发明实施例四提供的一种电动助力转向系统自动化测试方法的流程图。
具体实施方式
17.为了使本技术领域的人员更好地理解本发明方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分的实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
18.需要说明的是,本发明的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本发明的实施例能够以除了在这里图示或描述的那些以外的顺序实施。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
19.实施例一
20.图1是本发明实施例一提供的一种电动助力转向系统自动化测试系统的结构示意图,本实施例适用于根据测试序列搭建工况和场景,对电动助力转向系统进行自动化测试的应用场景。
21.如图1所示,该电动助力转向系统自动化测试系统1包括:仿真平台100和电动助力转向系统模型200。其中,仿真平台100用于根据测试序列模拟测试工况,并对电动助力转向系统模型200输出转角扭矩控制信号,转角扭矩控制信号包括方向盘转角信号、车速信号和方向盘手力矩信号;电动助力转向系统模型200用于根据仿真平台100的测试工况和转角扭矩控制信号执行运行测试,并将测试结果及采样数据发送至仿真平台100,实现仿真测试的闭环控制。
22.其中,测试序列为用于限定测试工况的可执行的程序文件,仿真平台100可根据测试序列模拟不同车辆、驾驶人员及道路工况,驱动电动助力转向系统模型200在测试工况下运行,实现自动化测试的工作流程。
23.可选地,仿真平台100与电动助力转向系统模型200之间的连接方式可包括总线连接和硬线连接,总线连接方式可用于实现仿真平台100的模拟工况数据及电动助力转向系统模型200的测试结果反馈数据的通信传输,硬线连接方式可用于实现系统供电等基本功能,具体的连线方式可根据测试作业需要进行选择,对此不作限制。
24.继续参考图1所示,电动助力转向系统模型200包括第一伺服电机201、第二伺服电机202、扭矩转角传感器203、外加扭矩传感器204、连接负载电机的负载电机控制器205及连接转向电机的转向系统控制器206。其中,第一伺服电机201用于根据方向盘转角信号和车速信号模拟方向盘转动;第二伺服电机202用于根据方向盘手力矩信号模拟方向盘手力矩值;扭矩转角传感器203用于采集第一伺服电机201的模拟偏转角度,并采集第二伺服电机202输出的模拟手力矩值;外加扭矩传感器204用于采集负载电机与转向电机之间的负载力矩;转向系统控制器206用于将模拟偏转角度、模拟手力矩值及负载力矩上传至仿真平台100,对仿真平台100的测试工况进行闭环调节,并根据仿真平台100下发的目标助力力矩驱动转向电机运行。
25.具体而言,在执行测试之前,测试人员可根据实际测试下发测试序列,仿真平台100根据测试序列中限定的动作和场景模拟不同车辆、驾驶人员及道路的闭环仿真系统,在该闭环仿真环境下对电动助力转向系统模型200的运行状态和性能进行测试,仿真平台100还对电动助力转向系统模型200输出方向盘转角信号、车速信号和方向盘手力矩信号等转角扭矩控制信号,第一伺服电机201根据方向盘转角信号和车速信号模拟方向盘转动;第二伺服电机202根据方向盘手力矩信号模拟方向盘手力矩方向和大小;扭矩转角传感器203将采集的模拟偏转角度(即模拟方向盘转角)和模拟手力矩(即模拟方向盘手力矩)发送到转向系统控制器206;外加扭矩传感器204将采集的负载力矩发送到转向系统控制器206;转向系统控制器206将模拟偏转角度、模拟手力矩值及负载力矩上传至仿真平台100,仿真平台100根据模拟偏转角度、模拟手力矩值及负载力矩计算目标助力力矩值,对车辆仿真环境进行闭环调节,以及将目标助力力矩值下发至转向系统控制器206,转向系统控制器206根据目标助力力矩驱动转向电机运行。
26.由此,本发明实施例的技术方案,通过方向盘转角和方向盘扭矩仿真及测试序列实现不同工况、不同车速的闭环测试,解决了现有的转向系统测试系统自动化程度低、测试功能覆盖不全面的问题,可自动生成测试报告和日志,便于查验测试结果,有利于扩大测试覆盖度和测试深度,提高测试效率,缩短测试周期,节约测试成本。
27.可选地,图2是本发明实施例一提供的一种仿真平台的结构示意图。
28.如图2所示,该仿真平台100包括:实时处理器110、第一io板卡120、第二io板卡130、can板卡140、第一故障注入板卡150和程控电源160。
29.其中,实时处理器110加载车辆动力学模型111和转向模型112,车辆动力学模型111用于根据测试工况模拟驾驶员-车辆-路况的闭环系统,并对转向模型112及电动助力转向系统模型200输出转角扭矩控制信号。第一io板卡120的第一端与实时处理器110连接,第一io板卡120的第二端经第一故障注入板卡150与电动助力转向系统模型200连接,第一io板卡120用于将电动助力转向系统模型200的状态信息上传至实时处理器110,并对电动助力转向系统模型200进行第一故障类型测试。典型地,第一故障类型测试包括但不限于:对地短路、对电源短路及开路等故障条件测试。第二io板卡130的第一端与实时处理器110连接,第二io板卡130的第二端经can板卡140与电动助力转向系统模型200连接,第二io板卡130用于将车辆动力学模型111与转向模型112的信息传输至转向系统控制器206,并将模拟偏转角度、模拟手力矩值及负载力矩上传至实时处理器110。程控电源160,用于对电动助力转向系统模型200供电。
30.如图2所示,车辆动力学模型111包括:车辆模型111a、驾驶员模型111b、虚拟控制器模型111c和道路模型111d。
31.其中,驾驶员模型111b可根据当前行驶状态实时的输出制动、油门以及方向盘转角等信号;虚拟控制器模型111c发出各种相关控制器状态信号给车辆动力学模型111;道路模型111d根据测试所涉及工况,模拟实车道路场景和动态仿真路面信息;车辆模型111a采集驾驶员模型2112输出的油门、制动踏板以及方向盘转角信号、方向盘手力矩信号、虚拟控制器实时状态信号、道路实时状态信息,给出车身姿态以及相关动力学信息,实现仿真测试系统的闭环调节。
32.如图2所示,仿真平台100还包括:第二故障注入板卡170,第二故障注入板卡170设
置于can板卡140与电动助力转向系统模型200之间,第二故障注入板卡170用于对电动助力转向系统模型200进行第二故障类型测试;其中,第二故障类型测试包括下述至少一项:输入信号丢失及硬件故障检测。
33.如图2所示,仿真平台100还包括:信号调理板卡180,信号调理板卡180设置于can板卡140与电动助力转向系统模型200之间,信号调理板卡180用于对can板卡140和电动助力转向系统模型200之间的交互信号进行转换处理。
34.在本发明的实施例中,实时处理器110与第一io板卡120、第二io板卡130及can板卡140之间可采用pxi(pci extensions for instrumentation,面向仪器系统的pci扩展)总线连接。
35.结合参考图2所示,车辆动力学模型111实时的与转向模型112交互,输出方向盘转角、转角速度、方向盘手力矩等信号给到转向模型112。车辆动力学模型111用来驾驶员-车辆-路况的闭环系统,并通过第二io板卡130、can板卡140及第二故障注入板卡170将车速信号、方向盘转角等信号传输至第一伺服电机201;转向模型112针对方向盘、上管柱、下管柱以及小齿轮齿条部件进行建模,并通过第二io板卡130、can板卡140及信号调理板卡180将方向盘手力矩传输至第二伺服电机202。第一伺服电机201根据车速信号和方向盘转角信号模拟方向盘转动,第二伺服电机202根据方向盘手力矩信号模拟方向盘手力矩方向和大小,转向系统控制器206通过信号调理板卡180、can板卡140及第二io板卡130将模拟方向盘转角、模拟方向盘手力矩及负载力矩传输至转向模型112,转向模型112根据方向盘转角及负载力矩计算目标助力力矩,对车辆整体的方向进行控制,并通过第二io板卡130、can板卡140及信号调理板卡180将目标助力力矩传输至转向系统控制器206,使转向系统控制器206调节转动相机的输出扭矩大小及方向。
36.由此,通过在实时处理器110加载车辆模型111a、驾驶员模型111b、虚拟控制器模型111c和道路模型111d,及各模型与电动助力转向系统模型200的数据交互,对不同工况、不同车速下的方向盘转角和方向盘扭矩进行闭环调节,有利于提高仿真测试效果。
37.实施例二
38.可选地,图3是本发明实施例二提供的一种电动助力转向系统自动化测试系统的结构示意图,在上述实施例一的基础上,示例性地示出了一种采用上位机系统进行测试序列管理的具体实施方式。
39.如图3所示,该电动助力转向系统自动化测试系统1还包括上位机系统300,上位机系统300与仿真平台100及电动助力转向系统模型200通信连接,上位机系统300用于管理测试序列,并根据电动助力转向系统模型200的回采数据生成测试报告。
40.本发明的实施例中,上位机系统300可通过以太网与仿真平台100及电动助力转向系统模型200通信连接。
41.可选地,图4是本发明实施例二提供的一种上位机系统的结构示意图。
42.如图4所示,上位机系统300包括:测试策略库310、测试规范库320、测试序列库330和测试结果库340。测试策略库310,用于根据测试人员的测试需求进行性能指标分解,得到测试策略和测试评价标准,其中,测试策略包括但不限于:测试范围、测试深度、测试技术、测试方法。测试规范库320,用于根据测试策略对测试功能的输入输出接口进行描述,生成测试序列指导信息,并对系统配置参数及用户数据字典变量进行更新。测试序列库330,用
于根据测试序列指导信息搭建测试序列和动作库,并根据系统配置参数和数据字典变量编写并运行测试程序,对电动助力转向系统模型200进行测试。其中,测试程序包括但不限于:程序代码和/或图像化测试步骤。测试结果库340,用于根据测试评价标准对电动助力转向系统模型200的回采数据进行管理,并生成测试报告。
43.如图4所示,测试策略库310包括测试跟踪矩阵模块311和输入输出参数表模块312;测试规范库320包括功能逻辑库321、参数配置库322、数字字典323;测试序列库330包括测试序列搭建331、动作库搭建332、参数映射库搭建333、mapping文件库搭建334、测试脚本模块335以及测试实施模块336;测试结果库340包括测试缺陷跟踪模块341和测试报告生成模块342。具体地,上位机系统1在电动助力转向系统的虚拟仿真测试环境的基础上,将电动助力转向系统的测试需求进行性能指标分解,由测试跟踪矩阵311和输入输出参数表312确定具体的测试范围、测试深度、测试技术、测试方法以及测试结果评价准则,并输出到功能逻辑库321、参数配置库322和数字字典323中;功能逻辑库321对设计功能的输入输出接口进行描述,用来指导测试序列和动作库的搭建,参数配置库322用来进行系统配置,数字字典323用来管理用户使用到的数据字典变量,将数据输出到参数映射库333和mapping文件库334,用来编写用于自动测试执行的代码或图形化测试步骤,测试实施模块336运行已经编写、调试完毕的自动化测试程序,对电动助力转向系统执行测试;测试缺陷跟踪模块341和测试报告生成模块342对测试程序运行完毕后的文档进行总结和管理,也包括测试结果是否符合评估准则。
44.由此,通过对测试序列的管理及测试执行过程的规范,实现测试序列与工况场景之间的搭建,可自动执行测试、生成测试报告和日志,便于查验测试结果,有利于扩大测试覆盖度和测试深度,提高测试效率,缩短测试周期,节约测试成本。
45.实施例三
46.基于上述任一实施例,本发明实施例三提供了一种电动助力转向系统模型,采用上述任一实施例提供的仿真平台和上位机系统进行仿真测试,具备上述实施例的有益效果。
47.图5是本发明实施例三提供的一种电动助力转向系统模型的结构示意图。
48.如图5所示,该电动助力转向系统模型200包括:第一伺服电机201、第二伺服电机202、扭矩转角传感器203、外加扭矩传感器204、连接负载电机的负载电机控制器205及连接转向电机的转向系统控制器206。其中,第一伺服电机201用于根据方向盘转角信号和车速信号模拟方向盘转动;第二伺服电机202用于根据方向盘手力矩信号模拟方向盘手力矩值;扭矩转角传感器203用于采集第一伺服电机201的模拟偏转角度,并采集第二伺服电机202输出的模拟手力矩值;外加扭矩传感器204用于采集负载电机与转向电机之间的负载力矩;转向系统控制器206用于将模拟偏转角度、模拟手力矩值及负载力矩上传至仿真平台100,对仿真平台100的测试工况进行闭环调节,并根据仿真平台100下发的目标助力力矩驱动转向电机运行。
49.本发明实施例提供的电动助力转向系统模型,通过增加第一伺服电机201和第二伺服电机与仿真平台进行数据交互,通过方向盘转角和方向盘扭矩仿真及测试序列实现不同工况、不同车速的闭环测试,解决了现有的转向系统测试系统自动化程度低、测试功能覆盖不全面的问题,可自动生成测试报告和日志,便于查验测试结果,有利于扩大测试覆盖度
和测试深度,提高测试效率,缩短测试周期,节约测试成本。
50.实施例四
51.基于上述任一实施例,本发明实施例四提供了一种电动助力转向系统自动化测试方法,该方法可由上述任一实施例提供的自动化测试系统执行。
52.图6是本发明实施例四提供的一种电动助力转向系统自动化测试方法的流程图。
53.如图6所示,该电动助力转向系统自动化测试方法,具体包括以下步骤:
54.步骤s1:根据测试序列模拟电动助力转向系统模型的测试工况,并对电动助力转向系统模型输出转角扭矩控制信号,转角扭矩控制信号包括方向盘转角信号、车速信号和方向盘手力矩信号。
55.步骤s2:采用第一伺服电机根据方向盘转角信号和车速信号模拟方向盘转动。
56.步骤s3:采用第二伺服电机根据方向盘手力矩信号模拟方向盘手力矩值。
57.步骤s4:获取第一伺服电机的模拟偏转角度,及第二伺服电机输出的模拟手力矩值。
58.步骤s5:获取电动助力转向系统模型的负载电机与转向电机之间的负载力矩。
59.步骤s6:根据模拟偏转角度、模拟手力矩值及负载力矩确定目标助力力矩,对测试工况进行闭环调节,并根据目标助力力矩驱动转向电机运行。
60.本发明实施例的技术方案,通过方向盘转角和方向盘扭矩仿真及测试序列实现不同工况、不同车速的闭环测试,解决了现有的转向系统测试系统自动化程度低、测试功能覆盖不全面的问题,可自动生成测试报告和日志,便于查验测试结果,有利于扩大测试覆盖度和测试深度,提高测试效率,缩短测试周期,节约测试成本。
61.应该理解,可以使用上面所示的各种形式的流程,重新排序、增加或删除步骤。例如,本发明中记载的各步骤可以并行地执行也可以顺序地执行也可以不同的次序执行,只要能够实现本发明的技术方案所期望的结果,本文在此不进行限制。
62.上述具体实施方式,并不构成对本发明保护范围的限制。本领域技术人员应该明白的是,根据设计要求和其他因素,可以进行各种修改、组合、子组合和替代。任何在本发明的精神和原则之内所作的修改、等同替换和改进等,均应包含在本发明保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。