技术特征:
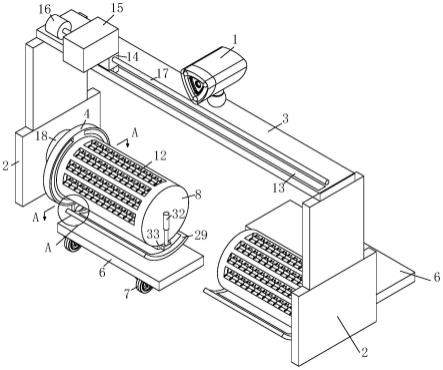
1.一种全地形智能勘探机器人,包括摄像头(1),其特征在于,还包括对称设置的侧板(2);所述侧板(2)的顶端之间固定连接有相连板(3),所述摄像头(1)固定连接在相连板(3)的上表面;所述侧板(2)的相对侧壁均转动连接有第一转盘(4),所述第一转盘(4)的圆周外侧壁上固定连接有连接板(5),所述连接板(5)的侧壁上转动连接有移动板(6),所述移动板(6)的底部安装有滚轮(7);所述第一转盘(4)的侧壁上固定连接有滚筒(8),所述滚筒(8)内开设有空腔(9),所述空腔(9)的侧壁上开设有出口(10),所述空腔(9)内活动连接有移动架(11),所述移动架(11)上固定连接有切割刀(12),所述出口(10)用于切割刀(12)穿出。2.根据权利要求1所述的一种全地形智能勘探机器人,其特征在于,所述相连板(3)的上表面开设有滑槽(13),所述滑槽(13)内滑动连接有滑块(14),所述滑块(14)上固定连接有重块(15)。3.根据权利要求2所述的一种全地形智能勘探机器人,其特征在于,所述相连板(3)的上表面固定连接有第一驱动电机(16),所述第一驱动电机(16)的驱动轴上固定连接有丝杆(17),所述丝杆(17)与滑块(14)螺纹连接。4.根据权利要求1所述的一种全地形智能勘探机器人,其特征在于,所述侧板(2)的侧壁上固定连接有第二驱动电机(18),所述第二驱动电机(18)的驱动轴与第一转盘(4)固定连接;所述连接板(5)上固定连接有第三驱动电机(19),所述第三驱动电机(19)的驱动轴与移动板(6)固定连接。5.根据权利要求1所述的一种全地形智能勘探机器人,其特征在于,所述空腔(9)的内侧壁固定连接有限位环(20),所述限位环(20)内活动连接有移动杆(21),所述移动杆(21)与移动架(11)固定连接,所述空腔(9)内设置有用于驱动移动杆(21)的推动机构。6.根据权利要求5所述的一种全地形智能勘探机器人,其特征在于,所述推动机构包括固定连接在空腔(9)的内侧壁上的第四驱动电机(22),所述第四驱动电机(22)的驱动轴上固定连接有第二转盘(23),所述第二转盘(23)上固定连接有推动板(24),所述推动板(24)与移动杆(21)的底端相接触;所述空腔(9)的内侧壁上固定连接有固定块(25),所述固定块(25)上固定连接有弹簧(26),所述弹簧(26)与移动杆(21)固定连接;所述推动板(24)上开设有卡槽(27),所述卡槽(27)与移动杆(21)的底部相对应。7.根据权利要求1所述的一种全地形智能勘探机器人,其特征在于,所述滚筒(8)的底部开设有出料口(31),所述滚筒(8)的外侧壁上固定连接有液压杆(32),所述液压杆(32)的活动端固定连接有挡料板(33),所述挡料板(33)位于出料口(31)处;所述侧板(2)上固定连接有连接杆(28),所述连接杆(28)的一端穿过第一转盘(4)的侧壁并固定连接有装料板(29),所述装料板(29)位于出料口(31)的正下方,所述装料板(29)位于滚筒(8)的下方,所述装料板(29)的上表面朝下开设有装料槽(30)。8.根据权利要求7所述的一种全地形智能勘探机器人,其特征在于,所述装料槽(30)内活动连接有排料管(34),所述排料管(34)活动贯穿在装料板(29)上;
所述第一转盘(4)上开设有用于连接杆(28)穿过的弧形槽(35)。
技术总结
本发明涉及机器人技术领域,具体的说是一种全地形智能勘探机器人,包括摄像头,还包括对称设置的侧板;所述侧板的顶端之间固定连接有相连板,所述摄像头固定连接在相连板的上表面;所述侧板的相对侧壁均转动连接有第一转盘,所述第一转盘的圆周外侧壁上固定连接有连接板,所述连接板的侧壁上转动连接有移动板,所述移动板的底部安装有滚轮;所述第一转盘的侧壁上固定连接有滚筒,所述滚筒内开设有空腔,所述空腔的侧壁上开设有出口,所述空腔内活动连接有移动架,本发明便于将装置从从下方台阶的梯田内转移至位于上方台阶的梯田内,同时实现了对上下梯田交界处田坝上野草的切割。时实现了对上下梯田交界处田坝上野草的切割。时实现了对上下梯田交界处田坝上野草的切割。
技术研发人员:ꢀ(74)专利代理机构
受保护的技术使用者:黄彩凤
技术研发日:2022.06.17
技术公布日:2022/8/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。