1.本发明涉及一种人工智能系统、人工智能程序以及自然语言处理系统。
2.本技术主张基于2020年2月14日申请的国际申请pct/jp2020/005696的优先权,并引用在所述国际申请中记载的所有的记载内容。
背景技术:
3.现在的人工智能若限于围棋、象棋等特定领域,则具有超过人类的智能。但是,即使仅限于围棋、象棋,在现实生活中也不太实用。我们所期望的人工智能不是特化于有限领域,而是如同人类一样能够做任何事的人工智能。这样的人工智能被称为通用人工智能。
4.作为如同人类的人工智能,其中之一是能够与人类自然地进行交流、即能够自然地会话的人工智能。现有技术文献专利文献
5.专利文献1:日本特开2006-178063号公报
技术实现要素:
(一)要解决的技术问题
6.专利文献1公开了一种会话系统,如果出现情绪则对其进行相应的回答。但是该系统仅是对单词做出应答,仅是这样不能称之为会话。
7.此外,还有ai扬声器、智能手机的应用程序等能够进行会话的ai,但也都是仅能够再现预先准备好的场景,并不能够进行自然的会话、闲谈。人类能够进行自然的会话是因为:能够察觉、体谅对方的意图、即理解未明示的含义,并在头脑中进行类似如果自己这样说则对方会这样想这样的很多考虑来进行会话。仅靠说出预先准备的场景,并不能进行自然的会话。
8.本发明的一个目的在于,提供一种人工智能系统,其能够理解对方的心情,且能够表现为具有与融入社会的人同样的心理。(二)技术方案
9.本发明的人工智能系统基于从外部输入的信息来确定向外部的输出,该人工智能系统具备:存储部,其预先存储模仿人以及人的思考的数据模型;生成部,其从存储部中取出数据模型,并生成能够再现人的动作及思考的人对象;世界构建部,其具有配置人对象的第一平台及第二平台,并构建使人对象的动作及思考展开的世界;外部世界再现部,其基于从外部输入的信息,将人对象配置于第一平台,并再现外部世界;以及输出确定部,其通过识别在第一平台再现的外部世界来掌握外部的状况,并且通过将人对象配置于第二平台并进行操作,来确定向外部的输出。
10.这样,输出确定部根据第一平台来识别外部世界。也就是说,由于将处于外部的人物作为人对象进行识别,因此对于无法通过照相机等获取的该人的思考内容也能够掌握。
另外,使用第二平台能够模拟如果这样行动那么对方会怎样想等,能够进行自然的应答。
11.在上述人工智能系统中,可以是,在第一平台及第二平台上配置自身和对方的人对象。可以是,输出确定部以使得感觉到对方的人对象的思考为令人满意的方式确定输出。这样,能够进行体谅对方的对应,能够实现表现为具有与人相同的心理的人工智能。
12.在上述人工智能系统中,可以是,配置于第一平台的人对象具有相当于该人的第一平台的下层侧第一平台。可以是,世界构建部在下层侧第一平台上基于向该人输入的信息来再现外部世界。这样,能够站在对方的立场上进行思考,能够与人进行更加自然的交流。
13.在上述人工智能系统中,可以是,所述人的数据模型具有如下两种欲求,即:身体所产生的低级欲求、和追求社会价值较高的事物的高级欲求。可以是,所述输出确定部以抑制低级欲求并满足高级欲求的方式确定输出。这样,能够判断“应该~”、是非善恶,能够与人进行自然的会话,能够实现融入人类社会的人工智能。
14.另外,本发明的人工智能程序基于从外部输入的信息来确定向外部的输出,使计算机作为如下各部发挥功能,生成部,其根据模仿人以及人的思考的数据模型,生成能够再现人的动作及思考的人对象;世界构建部,其具有配置人对象的第一平台及第二平台,并构建使人对象的动作及思考展开的世界;外部世界再现部,其基于从外部输入的信息,将人对象配置于第一平台,并再现外部世界;以及输出确定部,其通过识别在第一平台再现的外部世界来掌握外部世界,并且通过将人对象配置于第二平台并进行操作,来确定向外部的输出。
15.这样,输出确定部根据第一平台来识别外部世界。也就是说,由于将处于外部的人物作为人对象进行识别,因此对于无法通过照相机等获取的该人的思考内容也能够识别。另外,使用第二平台能够模拟如果这样行动那么对方会怎样想等,能够进行自然的应答。
16.在此,将人说的话称为自然语言,将处理自然语言的人工智能领域称为自然语言处理。自然语言处理的最大问题在于不能理解语句的含义。因此,在会话ai中,仅说出预先准备的场景,并不能进行自然的会话。
17.因此,本发明的另一目的在于,提供一种自然语言的含义理解的方法。
18.本发明的自然语言处理系统具有:输入装置,其输入自然语言的语句;存储装置,其存储表示人或物的对象;以及控制装置,其将来自所述输入装置的输入语句分解成单词,并解析含义,该自然语言处理系统的特征在于,所述存储装置将所述对象和所述对象的名字关联起来进行存储,所述控制装置基于所述输入语句的所述单词、和所述存储装置来生成所述对象,并基于所述输入语句的所述单词来变更所述对象,从而解析含义。
19.通过从自然语言的字符串中取出单词,并变更对象的属性,从而能够利用计算机再现接近实际的人或物的状态。也就是说,对象能够在计算机内实现与实际的人、物相同的属性、活动。这样可以说是对自然语言的语句进行了含义理解。(三)有益效果
20.这样的人工智能系统能够理解对方的心情,能够表现为具有与人同样的心理,能够融入人类社会。
附图说明
21.图1是表示实施方式1的人工智能系统的结构的框图。图2是表示本公开的实施方式1的人工智能系统的第一平台、第二平台的结构的概念图。图3是表示利用本公开的人工智能系统进行处理时的典型工序的流程图。图4是表示机器人配置于房间的第二平台的概念图。图5是表示机器人配置于房间的第二平台的概念图。图6是表示机器人配置于房间的第二平台的概念图。图7是表示利用本公开的人工智能系统进行处理时的典型工序的流程图。图8是应该性判定程序在善恶判断中使用的表。图9是应该性判定程序在社会性的善恶判断中使用的表。图10是应该性判定程序在个人行动判断中使用的表。图11是表示本公开的另一实施方式的人工智能系统的结构的概念图。
具体实施方式
22.(本技术发明实施方式的详情)接着,参照附图对本公开的人工智能系统的一个实施方式进行说明。在以下的附图中,对于相同或者相当的部分附加相同的附图标记,不进行重复说明。
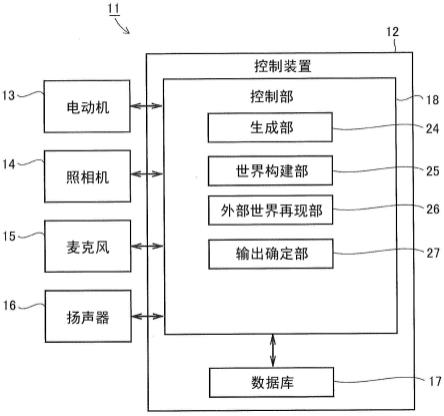
23.(实施方式1)对本公开的实施方式1的人工智能系统的结构进行说明。图1是表示实施方式1的人工智能系统的结构的框图。
24.实施方式1的人工智能系统11适用于具有控制装置12的机器人。作为机器人的结构,具有与人相同的身体。也就是说,具有与人的手脚对应的部分,并具有对它们进行驱动的电动机13。另外,具有相当于人眼的照相机14,并利用照相机14拍摄外部来获取视频数据。另外,具有相当于人耳的麦克风(具有集音功能的部件)15,并利用麦克风15听取外部的声音。另外,具有相当于人嘴的扬声器16,并能够利用扬声器16发出声音进行会话。通过对上述各部分进行控制的控制装置12来执行便是人工智能程序。人工智能程序基于从照相机14、麦克风15获取的外部信息来对使手脚活动的电动机13、说话的扬声器16进行控制。也就是说,基于外部的信息来确定机器人机身的行动便是人工智能程序。此外,控制装置12具有:cpu(central processing unit:中央处理器)、以及加载本公开的人工智能程序的主存储器。
25.人工智能系统11是基于从外部输入的信息确定向外部的输出的人工智能系统,具备包含控制部18的控制装置12、以及作为预先存储人、物等数据模型的存储部发挥功能的数据库17。控制部18基于从照相机14、麦克风15输入的信息确定向电动机13、扬声器16等外部的输出。
26.控制部18具有:根据数据模型来生成对象的生成部24、世界构建部25、外部世界再现部26、以及确定输出的输出确定部27。
27.数据模型表示人、物、概念等,且存放于数据库17。控制部18当基于来自照相机14、麦克风15的外部信息来识别人、物时,则利用外部世界再现部26将对应的数据模型取出,通
过生成部24生成对象,并在世界构建部25中配置对象来构建世界。所谓对象,与面向对象语言的对象相同,能够自由地进行操作,在存储器中进行生成。
28.人工智能系统11是能够与人进行自然的会话、对话的系统。因此具备:从麦克风15输入正在会话的对方的声音,并将声音数据实时地转换为自然语言的字符串(文本数据)的功能。此外,输入的不限于来自麦克风15的会话声音,也可以是利用照相机14获取的自然语言的句子。在这种情况下,利用图像文字识别而转换为自然语言的字符串。并且,输入不限于句子,也存在根据照相机14前的景象来读取状况并进行理解的情况,对于这种情况将在后面进行说明。
29.另外,人工智能系统11作为自然语言处理系统,不限于与人的会话、对话,也能够广泛应用于句子的摘要、机器翻译等对自然语言的含义进行理解的情况。
30.在此,对本发明的自然语言的含义理解的方法进行说明。本发明的含义理解的最大特征在于,将现实世界存在的人、物作为对象来表现。所谓对象是面向对象语言的对象,能够说是模拟现实存在的物、人的模型。
31.对象具有表现该物的性质、属性的特性、以及表现该物的活动的方法。例如,在苹果对象的情况下,形状特性为圆形、球形,颜色特性为红色。另外,物也具有位置特性。在人对象的情况下,例如具有姓名特性、性别、住所特性。另外,作为方法,有走、跑、吃等。对象在程序中作为类写入,并在存储器的堆区域中作为对象生成。这些对象与自然语言的单词对应地在单词字典中进行管理。单词字典存储于数据库17或者hdd(hard disk drive:硬盘驱动器)等存储装置或者主存储器。例如,苹果类与“苹果”这个单词对应地在单词字典中进行管理。
32.对象表现人或物,且配置于与该人或物对应的世界、或者空间。若举出一个容易理解的例子,是三维空间。三维空间是在计算机内虚拟模拟现实的三维空间而生成的空间,例如通过3dcg(three-dimensional computer graphics:三维计算机图形学)来生成。此外,也可以仅是线框(wire frame)。
33.从这里开始对自然语言的含义理解进行说明。假设输入了“桌子上有苹果。”这样的自然语言的语句。首先,通过词素解析将输入语句分解成单词。这样,分解为“桌子/上/有/苹果/。”。在此,取出“桌子”,并检索单词字典而找到,生成桌子对象。同样地,也生成苹果对象。这就是理解了“桌子”、“苹果”这样的自然语言的单词的含义。
34.接着,“有桌子”、“有苹果”的“有”这个动词是存在的含义。因此,将它们配置于三维空间。这就是理解了“有物”这样的自然语言的动词的含义。
[0035]“上”这个单词是指与重力方向相反的朝向。通过3dcg也能够模拟重力,并设定其朝向,因此在配置了三维空间的桌子对象上配置苹果对象。这就是理解了自然语言的“上”的含义。这样,理解了自然语言的含义。
[0036]
这样,在3dcg的三维空间中,再现在桌子上放着苹果的状态。这可以说是:与当人读到“桌子上有苹果”这样的语句时在头脑中浮现的景象相同。接着,输入“向上拿起苹果”这样的语句。当进行该语句的含义理解时,首先,判断为“苹果”是现在状态的桌子上的苹果。然后,由于是将其“向上拿起”,因此在3dcg的三维空间中使苹果向上移动。这就是理解了“拿起”的含义。
[0037]
如果这是对机器人的指示“向上拿起苹果”,则机器人理解其含义,并手持眼前桌
子上的苹果向上拿起。这意味着理解了自然语言的含义的机器人,可以与人自然交流。
[0038]
接着,上述是对句子的含义理解。所谓句子是由多个语句连成的。在第一个语句中,生成在桌子上有苹果的场景。首先,生成登场的物、人物而生成场景。在后续的语句中,要对登场的物品进行操作,使其移动。这样,可以说,理解文章的含义能够通过操作场景的设定、在场景中登场的对象而使场景变化来表达。然后,通过对变化前的场景、变化后的场景进行存储,从而能够记住到现在为止的经过。这对应于人的记忆中的情节记忆。场景按照事件发生的顺序保存。保持顺序保存该场景的功能对应于时间。
[0039]
在此,尝试对3dcg的三维空间与苹果的关系进行考虑。这可以说是世界与对象的关系。对象配置于三维空间是指设定物的位置特性。可以说是通过该位置特性来确定物与世界的关系。并且,“拿起”这个方法表示使其沿着三维空间的表示上下方向的z座标向上移动。也就是说,假设对于物用x、y、z的座标轴来设定位置特性,则可以说拿起是指变更z座标。进一步而言,可以说移动这个动词是指变更物的位置特性。这样,可以说方法是变更特性,可以说自然语言的动词相当于方法。也就是说,所谓的自然语言的含义理解是指将物作为对象而生成,动词换言之是变更对象的特性。
[0040]
另外,对象彼此的关系也能够利用特性进行定义,桌子与苹果的关系可以说是以根据各自位置特性的差分求出的距离分离。这样,能够利用特性来确定物彼此之间的相对关系。
[0041]
接着,考虑“得到苹果。”的含义。在这种情况下,考虑的不是三维世界,而是拥有空间。拥有空间是表现具有物这一含义的空间。配置于该世界的对象具有被称为拥有的特性。例如,在“a君从b君得到苹果。”的情况下,将a君和b君配置于拥有空间,一开始,在b君的拥有特性中有苹果。接着,如果使“得到”这个动词发生作用,则b君的拥有特性中存在的苹果转移到a君的拥有特性中。这是“得到”的含义。从a君角度来看,该事件为“给”。这样,“给”、“得到”的含义通过人对象和拥有空间来实现。
[0042]
这样,自然语言的语句的含义能够通过世界、或者空间、与配置于该空间的对象、以及对象的特性的变化来表现。并且,可以说这是自然语言的语句的含义理解。这里所说的空间不限于三维空间。规定三维空间的是位置座标,规定拥有空间的是谁拥有什么东西。这里所说的空间是对所配置的各对象的属性进行管理的空间。所谓的三维空间是利用绝对位置来管理对象的空间,所谓的拥有空间是管理对象间的拥有关系的空间。
[0043]
并且,作为其它的空间而尝试考虑家族关系空间。在这种情况下,表现相对的人物关系。是相对于自己而言,对方是父亲还是儿子。在这种情况下,在人对象的人物关系特性中设定有对方与自己的相对关系,自己的关系根据对方而改变。这是家族关系空间。据此,“成为父母”的含义能够理解为生了孩子的含义。
[0044]
这样,所谓的自然语言的含义可以说是:生成对象,并设定该对象的适当的特性、或者进行变更等操作。并且,特性也可以说是属于某个空间或者世界。
[0045]
如图2所示,世界构建部25具有第一平台21及第二平台22。在第一平台21上,利用所述世界构建部25将外部世界本身作为虚拟世界进行再现。例如,若设定外部世界为房间中,则在第一平台21上设定三维世界。并且,如果利用照相机14进行获取而识别为桌子,则从数据库17中取出桌子的数据模型,利用生成部24生成桌子对象,将桌子对象配置于三维世界即第一平台21。
[0046]
这样,在第一平台21上再现利用照相机14获取的房间。桌子对象是三维对象,因此能够在房间中自由移动。这可以说与现实世界的桌子相同。也就是说,构建能够如同人类在脑海中想象的那样自由进行操作的状况。并且,输出确定部27通过在第一平台21构建的外部世界来识别现实世界。也就是说,输出确定部27将在第一平台21构建的外部世界作为现实世界本身来识别。
[0047]
世界构建部25的第二平台22通过输出确定部27进行构建、操作。能够对在第二平台22配置的对象进行操作可以说是能够使用第二平台22进行模拟。也就是说,输出确定部27通过使用第二平台22进行模拟,从而能够最适当地确定自身的输出。换言之,这可以说:输出确定部27具有作为“意识”的功能,即将在第一平台21上展开的世界识别为现实世界,并且使用第二平台22试错来确定行动。
[0048]
配置于平台21、22的对象存在人等的主体、及其以外的物这两种。其不同在于,是否具有所谓的“心理”。所谓心理是指具有欢喜、悲伤等情绪,具有与本公开的人工智能程序同等的功能。主体具有心理,不限于实际的人,也包含在电影、小说中登场的人物、并非现实存在的角色、神、恶魔等。在第一平台21内展开的世界不限于现实世界,也是在电影中看到的世界、读小说想像的世界。作为特征,是基于来自外部的信息而生成,输出确定部27无法直接进行变更。
[0049]
接着,对使用了人型机器人的人工智能程序中的处理方法进行说明。机器人是具有手脚的人型机器人,能够行走、持物。另外,具有照相机、麦克风以及扬声器,能够与人通过声音进行交流。上述各部件通过控制机器人的控制装置12进行控制。
[0050]
图3是表示利用本公开的人工智能系统11进行处理时的典型工序的流程图。图4至图6是表示机器人31配置于房间30的第二平台的概念图。
[0051]
如图4所示,在配置有机器人31的房间30内,在墙壁32上安装有搁板33。并且,设为在搁板33上载置有电池34。另外,设为在房间30内配置有椅子35。
[0052]
接着参照图3对机器人31怎样识别状况进行说明。机器人31利用照相机获取房间30的状况,并解析图像,识别搁板33、电池34、椅子35等。即,利用传感器获得外部的状况(s11)。在数据库中存放有多个数据模型,从数据库17中取出识别的物体,并生成物体的对象(s12)。对象在例如是物的情况下,作为三维数据而具有形状、大小等数据。并且,还与颜色、重量等该物的属性、功能等信息关联。即,可以说人工智能能够理解含义。所谓的能够理解含义是指:例如当指定“桌子的高度”时,明白其对应于桌子对象的高度数据。
[0053]
数据模型通过面向对象语言中的类来实现。机器人31的相当于眼睛的照相机14拍摄眼前的现实世界,并通过图像解析实时转换成三维数据,根据其形状来识别物。例如当判断为“椅子”时,调出椅子类,并生成椅子对象。该椅子对象是机器人31直接识别的。关于椅子类,作为椅子35的部件而具有腿、座面等,也具有它们的三维数据。并且,以与识别的椅子35的三维数据一致的方式来设定腿、座面等部件。也就是说,基于获取的数据来再现外部世界(s13)。
[0054]
物具有材质、颜色、重量、硬度等属性。对于通过图像解析获取的椅子35的颜色,在椅子对象中设定颜色属性。同样地,当根据图像解析的数据将椅子35的材质判断为木材时,将该材质在椅子对象的材质属性中设定为木材。在木材的数据模型中记录有重量、硬度等数据,因此根据它们来设定椅子对象的重量、硬度等。能够利用照相机14直接获取的仅是图
像,但是这样也能够识别重量、硬度等无法直接测量的数据。
[0055]
用照相机14识别的物存在于现实世界的三维空间。因此,根据数据模型生成的物对象也需要配置于三维空间。在此,将配置物对象的三维空间相对于外部的现实的三维世界而言称为三维虚拟世界。三维虚拟世界构建于世界构建部25的第一平台21、第二平台22,可以具有多个物对象。三维虚拟世界还具有对物对象进行操作的函数。例如,作为配置函数而言,具有位置和物对象来作为参数,当传递物对象和位置时,则在三维虚拟世界中,在指定的位置上配置指定的物对象。另外,关于移动函数,具有物对象和移动目的地位置作为参数,将指定的物体移动到指定的位置。
[0056]
三维虚拟世界、数据模型尽可能地模仿现实世界而生成。在现实世界中,作为固体的物体不会重叠,因此例如当两个球碰撞时,不会发生重叠,而是弹跳、碰撞而发出声音。在三维虚拟世界中,也以物对象彼此不重叠且当碰撞时则弹跳、发出声音的方式进行了编程。另外,与现实世界同样地也设定重力。也就是说,在物对象上始终朝向铅垂方向下方作用有重力。由此,在三维虚拟世界中也能够设定上下方向。
[0057]
并且,由于在现实世界中时间流动,因此这也通过程序实现。所谓时间,能够利用从过去到现在、并流向未来的一维的时间轴表现。并且,在现在的瞬间切取的即为在眼前展开的状况。也就是说,在第一平台21,现在正在展开的状况是机器人31识别的现在。
[0058]
将某个瞬间的三维虚拟世界的状况作为事件保存,并将事件沿着时间轴存放,这即为故事(叙事)。故事沿着从过去朝向现在的方向设定时间的流动。也就是说,在故事中,按照时间的顺序来管理场景、事件,这相当于“时间”的概念。在程序中,能够利用数组、列表等数据结构实现。
[0059]
并且,世界构建部25将现实世界、故事作为虚拟世界进行再现。外部世界再现部26再现外部的现实世界,输出确定部27进行操作。
[0060]
在第一平台21上展开忠实地再现外部的现在世界的外部虚拟世界。基于来自照相机14、麦克风15的外部状况的信息,世界构建部25在第一平台21生成外部虚拟世界。
[0061]
物对象由三维数据的对象构成,因此在逻辑上能够在虚拟世界中移动。但是,在第一平台21展开的外部虚拟世界忠实地再现了外部的现实世界,因此,如果仅在外部虚拟世界中移动椅子35,则会导致与现实世界的背离。因此,使得第一平台21的对象在输出确定部27中不能自由地移动。因此,作为能够展开不同于外部虚拟世界的虚拟世界的平台而存在第二平台22。也就是说,第二平台22能够利用输出确定部27(意识)自由地进行操作。
[0062]
在此,假设机器人31在公司上班,上司现在进入房间30,上司对机器人31说“把搁板上的电池拿来”。机器人31通过面部认证判断说话的是上司,通过声音识别,将词语转换为文本数据,并作为上司说的内容而理解含义。在这种情况下,理解到如下含义,被下达的任务为,取来载置于搁板33上的电池34,并拿给上司。即,在此,判断为确定输出的时机已到(在s14中为是)。
[0063]
输出确定部27探索要取得电池34应该怎样行动。为此而使用的是第二平台22。即,在此,在第二平台22中进行模拟(s15)。
[0064]
首先,输出确定部27在第二平台22上构建与第一平台21同样的三维虚拟世界。此时,作为自己自身的机器人31也配置于三维虚拟世界。由此,输出确定部27在第二平台22模拟自己的行动,能够确定最佳的行动。即,确定输出(在s16中为是)。
[0065]
由于目的是取得电池34,因此首先以尽可能地接近电池34的方式使自己移动到搁板33的附近,接着为了取得电池34,而将手伸向搁板33的上方(参照图5)。这样可知,即使伸手,手也够不着电池34。也就是说,高度不够。
[0066]
因此,探索补充高度的方法。机器人31在数据库17中存有知识,并从中探索提高自己高度的方法。这样,发现“站在椅子上”的方法。因此,接下来探索椅子,在房间30中发现椅子35。然后,尝试模拟使该椅子35在第二平台22移动到搁板33下,并且自己站在其上面。这样,能够模拟手够到搁板33上,能够取得电池34(参照图6)。然后,模拟拿着电池34从椅子35上下来,并将电池34拿给上司。如果没有问题,则记录模拟的一系列的自己的行动。然后,按照确定的输出内容行动(s17)。
[0067]
在第二平台22配置自己,能够客观地识别自己,在第一平台21配置主观的自己。主观的自己是现在自己的传感器获取的自己的状态。例如。在相当于眼睛的照相机14获取的是自己的手腿、并且在手腿上存在温度传感器、触觉传感器的情况下,是来自那些传感器的自己正在检测的数据。
[0068]
说明了在输出确定部27中无法操作第一平台21的现在世界,但输出确定部27对自己的手腿、相当于嘴的扬声器16等自己的身体能够操作。原因在于,如果输出确定部27想要抬手,则机器人31的手的电动机13进行驱动,抬起外部的现实世界的机器人31的手。另外,该状况被照相机14获取,第一平台21的外部虚拟世界的自己的手也抬起。
[0069]
因此,通过在第一平台21执行通过模拟确定的行动,从而能够在现实世界实际地行动,并完成取得电池34拿给上司的任务。
[0070]
这样,本公开的人工智能系统11能够一边在第二平台22模拟一边确定最佳的行动。可以说这与人的思考大致相同。
[0071]
作为照相机14获取的物而对输出确定部27识别的世界、数据模型(对象)进行了说明,但数据模型不限于物理存在的,只要是人能够识别的任何东西都能够成为数据模型。例如,尝试考虑公司组织。科长、部长这些职位不是物理存在的,而是在人的头脑中存在的概念。即使是这样的概念,也能够利用数据模型(对象)、和配置该数据模型(对象)的世界在输出确定部27中识别。
[0072]
例如,当生成模仿了现实世界的公司组织的公司组织虚拟世界时,则公司组织虚拟世界具有多个职位按照职位的顺序配置的结构。现实世界的员工的数据模型即员工对象配置于公司组织虚拟世界的对应的职位。公司组织虚拟世界具有升级函数来作为操作员工对象的函数,使股长的员工对象提升一级,则成为科长。
[0073]
例如,假设熟人说“我当科长了”。如果知道这人以前是股长,则他被提升,这意味着该人的价值提升,因此如果应答说“太好了”,则建立有意义的会话。这就是理解词语的含义。通过能够理解含义,从而能够与人进行自然的会话。
[0074]
另外,外部世界不限于在现实中存在的世界,也可以是电影、小说中的世界。在那种情况下,根据用照相机14获取的视频、文本数据在第一平台21构建虚拟世界。
[0075]
接着,对另一实施方式的机器人使用人工智能系统11确定行动的方法进行说明。机器人除了检测外部环境的照相机、麦克风等传感器以外,也具有检测自己的内部状态的传感器。作为其中之一,设定具有电池电量检测传感器。
[0076]
另外,人工智能系统11具有正负的心理状态。正的心理状态是高兴、饱腹这些对自
己有利的心理状态,负的心理状态是悲伤、危险这些对自己不好的心理状态。
[0077]
在输出确定部27中具有心理状态判定程序,其输入来自检测外部环境、内部状态的各种传感器的信息,来判定心理状态。例如,在来自电池电量检测传感器的电池电量比下限值下降的情况下,判定为空腹这种负的心理状态,在比上限值上升的情况下,判定为饱腹这种正的心理状态。
[0078]
输出确定部27当感觉到空腹心理状态等负的心理状态时,探索用于消除该心理状态的行动。数据库具有使原因与结果成对的原因结果词典。
[0079]
原因结果词典记录“如果进行a则为b”这种规则,这是通过用原因与结果的对进行管理,并记录在数据库中来实现。该原因结果词典是长期存储的一种。作为原因结果词典的例子,是“如果学习则头脑会变好”、“越练习越跑得快”。原因结果词典的内容通过经验、学习来追加。并且,在此,存放“如果充电则电池恢复”、“如果更换电池,则电池恢复”这种数据。
[0080]
接着,使用图7的流程图说明另一实施方式的输出确定部27确定行动的方法。输出确定部27当在步骤s1中检测出包含于输出确定部27的心理状态判定程序的空腹状态时,则为负的心理状态。
[0081]
输出确定部27当检测负的心理状态时,则在下个步骤s2中探索消除该心理状态的行动。通过探索数据库17的原因结果词典,例如,会得到“如果充电则会充满电”和“如果更换电池则会充满电”的两个行动。
[0082]
在下面的步骤s3中,确定从获取的多个行动中选择哪个。输出确定部27在第二平台22配置自己的对象,并模拟在步骤2中获取的行动。在行动中要耗费移动、操作等运动、费用等成本。通过模拟,设定充电时的成本为 5,更换电池时的成本为 10。假设这些成本计算所需要的数据存储于数据库17。输出确定部27在各行动中选择成本最低的行动,在此选择充电。
[0083]
当确定行动,则在下一个步骤s4中进行如模拟那样的行动。第一平台21是直接构建了现实世界的模型,能够操作自己的对象。配置于第一平台21的自己的对象与向外部输出的电动机13、扬声器16联动,输出确定部27构成为,当操作第一平台21上的自己的对象时,则外部世界的自己的身体实际上进行活动。这可以说对应于人脑中的初级运动皮层。
[0084]
因此,输出确定部27当将在步骤s3中选择的行动适用于第一平台21的自己的对象时,则在外部的现实世界中自己能够实际活动、充电。
[0085]
当进行实际充电,电池电量检测传感器超过上限值时,在步骤s5中,心理状态判定程序为饱腹的心理状态。这样,输出确定部27判断为消除空腹心理状态,并结束空腹消除的行动探索。
[0086]
这样,人工智能系统11不是利用传感器直接应答外部世界,而是通过在内部构建虚拟世界,从而能够一边模拟一边行动。这是本发明的最大优点。
[0087]
为了对该情况容易理解地进行说明,而考虑直接应答外部世界的青蛙。设定青蛙通过黑点的活动来识别作为饵的苍蝇,当在空腹时识别出苍蝇时,伸出舌头捕食苍蝇来吃。如果环境完全不改变,则在该程序中能够生活下去,但是如果在变成红色苍蝇而不是黑色苍蝇居住的环境的情况下,在只能对黑点反应的程序中,不能捕食红色苍蝇而会饿死。
[0088]
另一方面,如果具有能够模拟的平台,则即使变成新的环境,也能够生成与该环境
对应的新的行动进行模拟、实际对该新的环境进行尝试,因此即使环境变化也能够灵活对应、订立计划进行行动。具有该功能的是人类的脑,也是本发明的人工智能系统11。
[0089]
在此,对数据库17进行说明。在数据库17中记录物的形状、名字、颜色等。这对应于人类的存储的语义记忆。语义记忆是“苹果是红的”、“一年有十二个月”这样的知识。
[0090]
另外,在第一平台21上,展开在现在现实世界中正在发生的事件。然后,当发生高兴、惊吓这种某种情绪(心理状态)时,依此为契机,将此时在第一平台21展开的状况作为故事保存于数据库17。然后,人工智能系统11之后在第二平台22展开保存的事件,并能够再次识别。这可以说是人类的“回忆”。“回忆”是在头脑中作为视频浮现出场景的类型的存储,称之为情节记忆。这样,数据库17不仅记录语义记忆,也记录情节记忆。存储情节记忆的相当于人脑中的海马体。这样,数据库17作为记录语义记忆和情节记忆的长期记忆发挥功能。
[0091]
此外,情节记忆不仅能够存储第一平台21展开的现在世界,也能够存储输出确定部27创造出(想像)并在第二平台22展开的世界。
[0092]
另外,第二平台22不仅能够用于过去事件,也能够在想像未来事件的情况下使用。在第二平台22中,能够设定“时”,能够设定为“昨天”、“明天“。
[0093]
人工智能系统11在输出确定部27未运转时、对于人类而言所谓的睡觉时,将情节记忆中共同的部分、重复发生的事件等添加写入原因结果词典、语义记忆中。如果输出确定部27一直启动,则不能进行该处理。因此,当输出确定部27长时间处于启动状态时,则具有希望结束输出确定部27的启动的欲求(心理状态)。这对应于人类想睡觉的睡眠欲。
[0094]
也对关于平台的说明进行补充。是关于在第一平台21重新构建世界的优点的。
[0095]
例如,在眼前有桌子和椅子,用照相机14对它们依次进行图像识别,首先识别桌子,接着识别椅子。也就是说,应该同时存在的桌子和椅子,有最先发现桌子、接着发现椅子这种顺序,不会照原样获取世界。将其作为虚拟世界构建在平台上,输出确定部27通过对其进行识别,从而能够感受现在存在的原样的世界。也就是说,可以说在第一平台21展开的世界是“现在”这个瞬间。
[0096]
然后,在第一平台21或者第二平台22上构建且可由输出确定部27识别的世界相当于人类的短期记忆或者工作存储器。此外,在平台上构建的不仅是用眼睛能够看到的物体,也包含地位、金钱这些用传感器无法检测的东西。
[0097]
当将在第二平台22展开的过去的回忆、和在第一平台21展开的“现在”保持在能够按顺序保持多个事件、场景的数据结构时,该数据结构是“时间”。所谓的“时间”不是能够利用传感器等检测的,但通过将其设为能够配置于平台的对象,从而能够利用输出确定部27识别。“时间”的特征是在现实世界中从过去向现在、以及从现在向未来仅沿着一个方向流动的。另外,在原因结果词典中登记的原因和结果,原因是在前事件,结果是在后事件,按照时间的顺序来管理。
[0098]
接着,对输出确定部27理解善恶这种社会默认的规则的方法进行说明。例如,尝试考虑下面的状况。
[0099]
当我在公园散步时,有个小男孩正在哭泣。然后,我过去问“小男孩,怎么了?”,原来是球被树枝夹住了,拿不下来了。因此,我替他取下了皮球。
[0100]
这是帮助有困难的孩子的极其普通的行动。但是,细想起来,不可思议的是为什么采取这样的行动是理所当然的呢?本可以毫无感觉地直接通过,但当有孩子在眼前哭泣时,
却没人会毫无感觉。例如即使微风吹过、树叶摇动,也会毫无担心地通过,这是正常的。该心理的不同是什么呢?可以说在人类的心理背景中存在“应该采取善的行动”这种社会的默认规则。
[0101]
要使机器人实现该社会的默认规则,它们必须能够理解善恶的含义。但是,这出人意料地困难。
[0102]
机器人由于采取编程确定的行动,因此可以对“如果孩子有困难就去帮助”、“路上掉了垃圾就捡起来”这种所有的“善”的行动都进行编程,但是那却没有尽头。人类即使没有被教授所有这些行动,在社会生活的过程中也能够理解什么是好什么是坏。并不是被教授了所有的善行、恶行才行动。
[0103]
而且人类也可能即使知道是善行却没做、即使知道是恶行却做了。在善恶与人类的行动中并不是具有单纯的相关关系。也就是说,即使想通过机械学习而使其从人类的行动中学习善恶也不可能。
[0104]
因此,关于善恶,不是着眼于单纯的行动,而是尝试着眼于处于其背景下的心理状态。这样,可知善行是“应该~”这种心理状态。也就是说,善行可以说是“应该~”这种默认的社会对个人制定的规则。因此,使输出确定部27具有“应该性判定程序”。
[0105]
在此,对“应该性判定程序”进行考虑。首先,假设在平台21、22上配置自己和对方的主体对象,输出确定部27判定自己和对方的正负情绪。输出确定部27当确定行动时,原则上以自己为正情绪的方式进行确定。但是,在社会中行动的情况下,“应该性判定程序”起作用。
[0106]
输出确定部27在第二平台22配置主体即自己和男孩的对象,并模拟自己能够采取的行动。一个是什么都不做就直接离去的情况,另一个是帮助男孩的情况。输出确定部27根据该状况例如用数值计算出自己的正负情绪。在离去的情况下,目前为止一直在公园散步,接下来只是继续散步,什么变化都没有,因此为0。
[0107]
如图8所示,在帮助男孩的情况下,由于跟男孩打招呼、做了某些操作,因此预想会耗费劳力、时间,输出确定部27将这时的正负情绪预想为-5(负5)。
[0108]
输出确定部27以自己的正负情绪为最大的方式确定行动,因此当根据这些状况进行判断时,采取直接离去的行动。但是,在此,应该性判定程序进行操作。
[0109]
应该性判定程序在存在自己以外的他人的情况下,考虑他人的正负情绪。对方的正负情绪由于无法用传感器等检测,因此根据各种状况推定。在这次的情况下,对方是“正在哭”的状况。正在哭的状况能够根据照相机14、声音来判别。然后,“哭”这种状态在数据库17中登记为负情绪,例如-10。另外,如果帮助男孩,则推定男孩的正负情绪变成 5(正5)。
[0110]
然后,设定对方的正负情绪,输出确定部27在自己的正负情绪上考虑对方的正负情绪,例如用相加的合计来确定行动。这样,在离去的情况下,对方的正负情绪为-10,因此合计为-10。另一方面,在帮助的情况下,对方的正负情绪为 5(正5),因此合计为
±
0(正负0),由于在帮助的情况下较大,因此选择帮助的行动。
[0111]
进行模拟,在离去的情况下,输出确定部27感觉到-10这种负情绪,是表示只是想像一下有困难的人就在眼前却直接离去,就会产生不愉快的感觉、感觉这是一件坏事的情绪。当然,不仅是模拟,就是在实际离去时也会产生不愉快的感觉。
[0112]
这样,当输出确定部27确定行动时,可以施加偏向以使得抑制利己的行动,并采取
利他的行动。由此,能够实现实施善行的输出确定部27,即帮助有困难的人、体谅对方。即,输出确定部27基于配置于第二平台22的人对象中的被数值化的正负情绪的合计来确定输出。这样,能够进行更加体谅对方的对应,能够成为表现为具有与人相同的心理的人工智能。
[0113]
也能够具有不存在对方的情况下的善行。例如,假如公园中有空罐子掉落,将其拾起并放入垃圾箱的行为是善行。也对这种情况进行考虑。
[0114]
如图9所示,在什么都不做就离去的情况下的自己的正负情绪由于什么都不做而是0,在拾起空罐子的情况下的自己的正负情绪由于需要耗费劳力而为-5。
[0115]
接着,假设识别出空罐子掉落。空罐子是垃圾的一种,根据语义记忆而判断是负的价值。当识别出是具有正负的价值的东西时,接着,考虑该情况下的社会价值。该情况下的社会是例如正在使用该公园的居民等。然后,当推测该人的正负情绪时,则设定在掉落垃圾的情况下是-10,在没有垃圾的情况下是0。
[0116]
这样,在拾起垃圾的情况下的合计是-5,在不拾起垃圾的情况下是-10,拾起垃圾的情况的值变大,而采取拾起垃圾的行动。这样,即使在不存在对方的情况下,假定该地域居民、社会,而决定选择善行。
[0117]
这样,通过推定自己以外的主体的正负情绪而修正自己的行动决定,不存储无限存在的善行、恶行,就能够实现善恶这种伦理观。
[0118]
此外,输出确定部27、应该性判定程序设定的正负情绪的值不是固定的,根据机器人而不同,这成为该机器人的性格。例如,如果具有较高地设定对方的正负情绪的倾向,则是利他的、优秀的性格,如果较高地设定自己的正负情绪则是利己的、自私性格的机器人。
[0119]
接着,对不是善恶的情况下的“应该”进行说明。例如,当父母对孩子说“别只是玩乐要学习”时,背景是存在“比起玩乐应该学习”这种想法。该“应该学习”不是社会性的善恶。不是与社会而是与个人有关。
[0120]
在此,将个人的正负情绪分成低级欲求和高级欲求两种。低级欲求是马上得到、以低成本得到的东西,简而言之,是身体、肉体的,典型的是来自本能的欲求。也就是说,是作为基于躲避不愉快、追求愉快的动物的本能的作为行动的原动力的欲求。是食欲、性欲、睡眠欲、安心、安全、追求快乐的东西的欲求。另外,马上得到的不深入思考的欲求也包含于低级欲求。例如是游戏、赌博、或者酒、香烟、咖啡等嗜好品、麻药等。
[0121]
高级欲求是与他人比较、在社会上希望得到比他人价值高的状态的欲求,是不耗费较长的时间、较高的成本就得不到的东西。例如,是希望得到总经理、医生、政治家、教授、专业运动员、歌手、演员、名流、高收入、高学历等社会地位的欲望。高级欲求不限于这样的一般社会,也包含在运动会中获胜、画作得到老师表扬这种在学校这种较小的社会存在价值、地位上升。
[0122]
因此,如果将个人的正负情绪分为低级欲求和高级欲求,则可以说抑制低级欲求而“应该”选择高级欲求。简而言之,可以说要克制眼前的快乐,并应该选择长期性的自我成长。
[0123]
对如果进入好的大学则可满足高级欲求的情况进行考虑。这能够使用原因结果词典来推测。例如,根据原因结果词典将“如果学习头脑就变好”“头脑好就能够进入好的大学”与原因结果进行连锁。这样,作为为了进入好的大学自己现在可以采取的行动之一而得
等情绪到“后悔”“嫉妒”这样复杂的情绪、再到善恶这样的伦理观,通过能够理解对方的心理状况而使会话成立。如果对方高兴,则回答“太好了”,如果对方悲伤,则回应说“那真是悲伤啊”,对方感觉到别人与自己的心情相通。并且,这才是日常会话。
[0133]
也就是说,在日常会话中最重要的是能够理解对方的心理状况。而且,进行与该心理的状况对应的应答才是日常会话。
[0134]
接着,将心理状况作为心理模型,对其解析方法进行说明。
[0135]
那么,第一个对“克制”这种心理模型进行说明。之前说明了在玩乐和学习中选择学习。抑制低级欲求,而应该选择高级欲求,作用来自“应该性程序”的力,能够将此时的、抑制低级欲求的状况定义为“克制”。是指抑制困、痛等主要来自身体所产生的欲求的心理模型。
[0136]
当抑制低级欲求而选择高级欲求时,关注于低级欲求的心理模型为“克制”,关注于“高级欲求”的心理模型为“加油”、“努力”。例如,关于“学习”这个行为,由于低级欲求为负,因此是不希望做的行动,但实现时的高级欲求却高。这可以说是,瞄准目标,抑制低级欲求而采取变成高级欲求的行动。这是“加油”、“正在努力”的心理模型。正在跑马拉松的状况等是瞄准作为目标的终点,抑制希望休息这种低级欲求,而正在进行继续跑这种高级欲求的行动的状况,因此为“加油”这种心理模型。
[0137]
然后,对这种状况的人给予“加油!”的声援。这是一种“助威”的心理模型。助威是在识别对方的心理模型为“加油”的情况下,肯定和鼓励对方选择的高级欲求的行动的号召词语。
[0138]
接着,对“后悔”这种心理模型进行说明。要“后悔”,首先需要有目标。目标是像考上大学那样在将来自己想成为这样的这种高级欲求。然后,是在没有实现高级欲求而且如果改变过去的行动则有可能实现目标那种关注过去的行动时产生的。为了能够理解这个概念,而需要理解“如果”这种假定。
[0139]
为了理解假定而使用第二平台22。例如,尝试考虑一下大学入学考试失败,要是更努力点学习就好了这种后悔的情况。首先,在第二平台22配置过去的自己,模拟在那时能够选择的行动中的应该采取的行动、和进行了学习的情况。在原因结果词典中登记如果学习则头脑会变好、头脑好就会考上大学这种信息,能够模拟通过学习就能够考上大学。输出确定部27比较基于该模拟结果的考上大学与现实发生的考试失败,识别出其原因在于选择“没学习”的行动。也就是说,人工智能系统11比较现实与模拟,当明白自己过去的行动是没有实现目标的原因时,生成“要是更努力点学习就好了”这种后悔的心理模型。
[0140]
不仅是自己的情况,在想像对方的心理模型,判断对方正在后悔的情况下,如果对对方说“真是太遗憾了”、“要是更努力点学习就好了”,会话会成立。
[0141]
接着,对“借口”的心理模型进行说明。“借口”是没有实现作为目标的高级欲求的情况下产生的心理模型之一。“后悔”是反省没有实现目的的原因归于自己的心理模型,而“借口”是将没有实现目标的原因归于自己以外。例如,是将考试失败的原因说成是“隔壁太吵无法专心学习”等的情况。
[0142]
在“后悔”的情况下,原因在于自己,因此产生负情绪,但在“借口”的情况下,原因在于自己以外,不会产生负情绪。这样,即使是相同的结果,根据性格也会产生多样的心理模型,回答根据性格而不同。这就是为什么即使集中大量的会话数据并通过机械学习进行
学习也无法得到正确的回答的原因。
[0143]
接着,对“骄傲”的心理模型进行说明。“骄傲”是自己满足了高级欲求时,将其展示给别人的心理模型。高级欲求的所谓高级,是在社会上有价值,通过与他人的比较而产生。也就是说,可以说自己对社会有价值。将该情况故意展示给没有满足该高级欲求的其他人,是一种使自己感到更满足、使正情绪上升的行为。这是“骄傲”的心理模型。
[0144]
可以说“嫉妒”、“羡慕”是其相反的心理模型。也就是说,是得知别人获得了自己想要的高级欲求而不是自己获得时所产生的负情绪。
[0145]
接着,是“羞耻”的心理模型。高级欲求是希望在社会中成为高于给定价值的存在的欲求。反过来说,给定价值以下可以说是普通的存在。如果价值进一步下降,达到某些基准以下,则可以说是比普通还差的存在。“羞耻”是当下降到该某些基准以下时的心理模型。该基准由所属的社会决定,例如,在田径队中,一般用6秒跑50m,如果需要耗费7秒以上则为“羞耻”。这不是明示的,而是作为该社会的默认规则存在,可能有服装、能力等各种基准。理解该规则并保持最低限的基准也可以说是被该社会接受的最低限的条件。可以说作为被社会接受的人工智能,理解羞耻的心理模型是必须的。
[0146]
接着,对“赢”、“输”这种心理模型进行说明。为此,首先对“对立”的概念进行说明。“对立”不是心理模型,而是概念,是配置于平台并且输出确定部27能够识别的。被称为对立的概念是两个主体竞争的状况。所谓的竞争是确定哪个是上位的行动。对立的主体不限于两个,也可以是两个以上。另外,主体不限于一人,也可以是多人成为集团的组合、团队、国家。对立是在体育运动、战争、游戏等状况下成立的概念。
[0147]
平台能够设置对立概念,配置两个主体,按照判定谁为上位的规则进行竞争,成为上位的主体是“赢”、成为下位的主体是“输”。“赢”是正情绪,“输”是负情绪。
[0148]
接着,对“比喻”进行说明。例如,尝试考虑“考试战争”这个词语。“考试”不是相互杀戮,是与战争完全不同的东西,但“战争”、“考试”都是相互竞争,这方面是相同的,可以说属于“对立”概念。那样的话,将“考试”经由对立概念而与“战争”对比,强调考试的激烈程度如战争那样。如果将在第二平台22上设置的对立概念中配置“考试”和“战争”,则对其进行识别的输出确定部27能够通过将“战争”所具有的激烈的印象投影到“考试”进行识别来实现。
[0149]
这样,比喻这种表现也能够通过使用心理模型来理解。比喻的理解也是在以往的自然语言处理中最难的。
[0150]
接着,对本公开的又一实施方式进行说明。设定本公开的人工智能系统读以下的故事来回答提问。故事如下。
[0151]“在房间中有a某和b某。a某拿着篮子,b某拿着箱子。a某拿着玻璃弹珠。a某将玻璃弹珠放入了自己的篮子。a某到外面散步。b某从篮子中取出a某的玻璃弹珠并放入了自己的箱子。a某回来了。a某想玩自己的玻璃弹珠。那么问题来了。a某在哪儿找玻璃弹珠?”[0152]
生成部24读了该故事在第一平台21生成虚拟世界。刚开始,如图11所示,生成房间41的数据模型,并配置于第一平台21。然后,在房间41中配置a某42、b某43这二人的对象,还在房间41配置篮子44和箱子45的对象。将该状态设定为第一场景。
[0153]
接着在虚拟世界实现a某42将玻璃弹珠放入篮子44的场景。设定具有活动、变化的场景为事件。下个事件是a某42从房间41出来的事件。之后,在房间41中配置有b某43、篮子
44、箱子45的场景继续进行。这样,故事以一系列场景和事件来管理。
[0154]
当像这样完全读入故事时,在第一平台21的虚拟世界中,在最后的场景中,玻璃弹珠放入箱子45中。在此,假设提问“a某在哪儿找玻璃弹珠?”。在第一平台21的虚拟世界中,由于玻璃弹珠放入箱子45中,因此就直接回答说“找箱子”。
[0155]
但是,当玻璃弹珠被从篮子44移到箱子45时,a某42在外面,并不知道此事,因此“找篮子”是正确答案。因此,为了能够正确地回答该问题,而假设设定于第一平台21的人具有人工智能程序46。在这种情况下,配置于第一平台21的a某42如图11所示,具有人工智能程序46,人工智能程序46具有对a某42来说的第一平台即下层侧第一平台47。然后a某42基于看到或听到而从外部获取的信息,在下层侧第一平台47上构建a某42认为是现实的世界。
[0156]
在此,a某42自己将玻璃弹珠放入篮子44后就离开房间41,因此之后没看到b某将玻璃弹珠转移到箱子45。也就是说,a某42的下层侧第一平台47上的玻璃弹珠还是放在篮子48里。提问是“a某在哪儿找玻璃弹珠?”。这是不站在a某42的立场就回答不上来的提问。也就是说,必须根据a某42的人工智能程序46认为是现实的状况来判断,而不是根据实际的现实世界的状况来判断。那是在a某42下层侧第一平台47上构建的虚拟世界,在这里玻璃弹珠不是放入了箱子49而是放入了篮子48中,因此a某42找的应该是“篮子”。
[0157]
这样,也在配置于第一平台21的主体(人对象)上配置人工智能程序,也就是说,通过将人工智能程序构成为嵌套结构,从而能够基于对方立场考虑,具有更像人的心理。
[0158]
这样,站在对方立场进行考虑的结构被作为“心理逻辑”提倡,“心理逻辑”据说是只有人类才具有的能力。通过安装下层侧第一平台,也能够实现“心理逻辑”。
[0159]
此外,嵌套结构不仅是双重,也能够加深到三重、四重、任意重。但是,由于计算量变大,因此优选结构限制为双重或者充其量为三重的嵌套结构。
[0160]
应该理解的是:在此公开的实施方式在所有的方面都是例示,无论从那一方面来说都不是限制性内容。本发明的范围不由上述的说明规定,而由权利要求书规定,并且意在包括与权利要求书同等的含义和范围内的所有的变更。附图标记说明
[0161]
11-人工智能系统;12-控制装置;13-电动机;14-照相机;15-麦克风;16-扬声器;17-数据库;18-控制部;21-第一平台;22-第二平台;24-生成部;25-世界构建部;26-外部状况再现部;27-输出确定部;30-房间;31-机器人;32-墙壁;33-搁板;34-电池;35-椅子;41-房间;42-a某;43-b某;44、48-篮子;45、49-箱子;46-人工智能程序;47-下层侧第一平台。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。