一种转角范围超360
°
的机械和电气限位机构
技术领域
1.本发明涉及转台设计技术,具体涉及一种转角范围超360
°
运动转台的机械和电气限位机构结构设计。
背景技术:
2.在有限角大角度运动的转台设计技术领域,没有可同时满足机械限位和电气限位都超过360
°
的限位机构,例:一种转角范围不超过360
°
的转台电气限位机构(专利号:zl201210578352.6)对于电气不超过360
°
转角的电气限位机构作了说明,但是超360
°
的电气限位用该机构原理不能满足;一种转角范围超过360度的小型转台限位机构(专利号:zl201210012936.7)对超过360
°
的转台的机械限位机构作了说明,但超360
°
的电气限位未进行设计。因此针对该情况进行机械限位机构和电限速限位机构的优化设计,使其能同时满足超360
°
的转台设计需求。
3.目前常见的有限角度转台,因其结构尺寸限制,无法实现360
°
旋转,其存在以下缺点:
4.(1)机械止挡机构大多为外置式设计。外置式的机械止挡机构尽管受力相对较小,但因为占据了转动圆周的周向尺寸,因此转动机构在运动过程中无法达到360
°
角度。
5.(2)机械止挡机构和电限速限位机构独立设计。独立设计的好处是相互不干扰,减少故障发生牵连,但从另一个角度,机械和电气都是完成限位的目的,相互之间需要有较高的契合度,集成设计可以提高机械和电限速限位控制的准确度。
6.(3)超360
°
机械止挡机构未考虑角度超限回转过程中的机械撞块同步回转功能。一般的超360
°
机械止挡机构在设备进行超限回转过程中,转动轴在带动机械拨块回转,因为机械拨块与机械撞块只是单边约束,因此回转过程中机械拨块先行脱离,而电限速限位凸轮因与机械撞块相连无法与机械拨块一起跟随脱离,无法满足电限速限位机构控制的需求,因此需要利用结构设计实现回转同步功能。
技术实现要素:
7.本发明的目的在于提出一种转角范围超360
°
的机械和电气限位机构。
8.实现本发明目的的技术解决方案为:一种转角范围超360
°
的机械和电气限位机构,包括转动轴、轴承、机械拨块、机械挡块、机械撞块、弹簧机构,电限凸轮、电限速开关、电限位开关,其中:
9.轴承的内圈安装转动轴,转动轴固定机械拨块,使机械拨块随轴承的内圈联动;轴承外圈安装机械撞块,零位状态下机械撞块与机械拨块之间存在
±
α角度差;机械挡块安装在设备非转动外壳固定处,零位状态下机械挡块与机械撞块之间存在
±
β角度角度差;机构从零位状态开始转动,转动轴带动机械拨块转动α角度碰到机械撞块,然后带动机械撞块一同转动,继续转动β角度碰到固定在非转动外壳处的机械挡块,共转动α β角度,相反方向类同,因此一共可转动2α 2β角度;
10.电限凸轮固定在机械撞块上,采用两个限速、两个限位凸轮的形式,随轴承的外圈联动,电限速开关、电限位开关安装在设备非转动外壳固定处,与限速、限位凸轮配合,当设备往一个方向转动,限速凸轮配合电限速开关,设备减速到达极限位置后,限位凸台配合电限位开关实现转动停止功能;
11.弹簧机构连接活动端机械拨块和设备非转动外壳固定处,弹簧机构在零位状态下为非受力状态,在正负α β极限位置拉力最大,使得机械拨块在回转过程带动机械撞块一同回转,电限凸轮能及时脱离电限速开关和电限位开关。
12.进一步的,所述弹簧机构包括弹簧、弹簧动块、弹簧定块,其中弹簧动块安装在机械撞块的端面处,弹簧定块安装在设备非转动外壳上,弹簧的两端为环形结构,一端连接弹簧动块,一端连接弹簧定块。
13.进一步的,所述电限凸轮上有四个凸轮撞片,其中两个为限速撞片,两个为限位撞片,通过凸轮撞片触及电限速开关、电限位开关,实现机构减速和停止功能。
14.更进一步的,所述电限凸轮设计成四层层叠式结构,每个电限凸轮分别布置在不同的轴向高度上,与不同轴向高度的限速开关和限位开关一一对应。
15.更进一步的,第一电限速开关、第一电限位开关对位布置,第二电限速开关、第二电限位开关对位布置。
16.进一步的,装配过程如下:
17.首先,将轴承安装入机械撞块槽内,槽的内侧顶住轴承外圈一边,将电限凸轮的直口顶住轴承外圈的另一边,电限凸轮和机械撞块之间通过螺钉进行紧固;
18.其次,将安装好的轴承、机械撞块、电限凸轮集成安装到转动轴上,转动轴端面上安装机械拨块,同时,机械拨块顶住轴承的内圈,机械拨块通过圆周外圈的四个均布销钉孔固定销钉定位在转动轴上,然后通过圆周内圈的螺钉进行紧固;
19.然后,弹簧机构一端安装在机械撞块的端面处,另一端安装在设备非转动外壳上和设备非转动外壳固定处;
20.最后,确定好正反转时限速限位开关的位置后,将电限速开关、电限位开关紧固在设备非转动外壳上。
21.一种转角范围超360
°
的机械和电气限位方法,基于所述的转角范围超360
°
的机械和电气限位机构,实现转角范围超360
°
的机械和电气限位。
22.本发明与现有技术相比,其显著优点为:1)实现转角范围超360
°
的机械和电气限位机构。通过机械拨块、机械撞块等机械止挡机构的设计,可实现超360
°
的有限角大角度运动控制。机械和电气集成设计,可以增加相互关联度,使得机械角度和电限位角度保持一致,相比传统的各自分开控制的方式,大幅提高了控制精度。2)实现回转跟随。在传统的超360
°
旋转机械限位机构中,在设备回转过程中,因为没有电限速限位的介入,无需考虑回转跟随的问题,而电限速限位要求不能有回转滞后。因此设计弹簧机构,弹簧机构一端连接机械拨块,一端连接设备非转动外壳,超限回转时通过机械拨块带动机械撞块和电限凸轮同步回转,保证电限凸轮有效脱离电限速限位开关。3)电限凸轮采用层叠式设计。凸轮采用层叠式设计的好处是,可以进行多个限速限位开关的控制。现阶段跟踪雷达在360
°
转动过程中,需要两个限速两个限位开关,电限速限位凸轮采用四层设计的方式可以满足要求。
附图说明
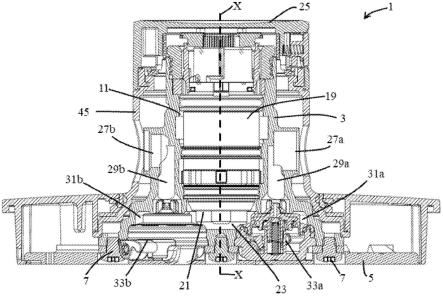
23.图1为限位机构零位状态下的二维剖视示意图。
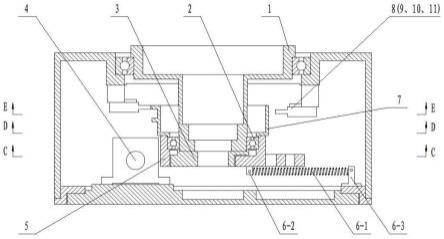
24.图2为限位机构零位状态下的三维轴测示意图。
25.图3为零位状态下的机械限位和电气限位每层的剖视图。
26.图4为机械拨块、机械撞块三维示意图。
27.图5为机械拨块、机械撞块组合二维示意图。
28.图6为电限凸轮三维轴测示意图。
29.其中:1转动轴、2轴承、3机械拨块、4机械挡块、5机械撞块、6-1弹簧、6-2弹簧动块、6-3弹簧定块、7电限凸轮、7-1电限速凸轮片、7-2电限位凸轮片、8第一电限速开关、9第一电限位开关、10第二电限速开关、11第二电限位开关。
具体实施方式
30.为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处描述的具体实施例仅仅用以解释本技术,并不用于限定本技术。
31.本发明一种转角范围超360
°
的机械和电气限位机构,在采用机械限位的旋转设备上,集成化电限速限位机构,使得满足超360
°
的机械和电气限位控制。该机构由转动轴1、轴承2、机械拨块3、机械挡块4、机械撞块5、弹簧机构(弹簧6-1、弹簧动块6-2、弹簧定块6-3、电限凸轮7、电限速开关8,10、电限位开关9,11等组成。其中轴承2内圈安装转动轴1和机械拨块3,轴承2外圈安装机械撞块5和电限凸轮7,机械挡块4和电限速、限位开关8,9,10,11安装在设备非转动外壳固定处,弹簧机构连接活动端机械拨块3和设备非转动外壳固定处。通过分层结构来实现机械限位和电气限位,具体如下:
32.(1)机械限位层:机械限位层位于轴的最底端,由机械拨块3、机械挡块4、机械撞块5、弹簧机构组成,机械拨块3与轴底端相连,同属于轴承内圈,机械挡块4与轴承外圈相连,机构从零位状态开始转动,机械拨块3与机械挡块4之间存在
±
α角度差。轴转动时带动机械拨块3,机械拨块3转动α角度差碰到机械撞块5,然后带动机械撞块5一同转动,继续转动β角度碰到固定在非转动外壳处的机械挡块4,共转动α β角度,相反方向类同,因此一共转动2α 2β角度。
33.(2)电气限位层:电气限位层位于机械限位层的上方,由电限凸轮7、电限速开关8,10、电限位开关9,11组成,电限凸轮7与机械撞块5相连,同属于轴承外圈,电限速、限位开关8,9,10,11固定在非转动外壳处。轴转动2α 2β角度时,电限凸轮7随机械撞块5共转动2β角度,在
±
β角度设置电限速、电限位开关固定在非转动外壳处,可以实现轴在-α-β到α β转动时的电限控制。
34.其中零位状态为该限位机构初始状态,具体为轴承内圈的机械拨块与轴承外圈的机械撞块转动至轴对称状态,同时,机械挡块也位于该对称轴线上。
35.超360
°
旋转限速限位设计。一般2β角度相比360
°
小了机械挡块的周向角度尺寸,因此2β角度略小于360
°
,机械限位机构共转动2α 2β角度,增加2α的角度可以有效保证超360
°
。
36.超限回转跟随设计。当回转过程中,因为机械拨块3与机械撞块内外撞片之间存在
α角度回差,导致在转动轴1超限回转过程中机械撞块5未随机械拨块3一起回调,机械撞块5上固定的电限凸轮7的凸轮撞片仍触及电限速、限位开关。因此,设计弹簧机构可使转动轴1在回转过程中电限凸轮撞片能及时脱离电限速开关和电限位开关。弹簧机构的安装位置选择较为重要,弹簧在零位状态下为非受力状态,在正负α β极限位置拉力最大,可以保证在回转过程中及时带动机械撞块回调。
37.电限凸轮撞片层叠设计。电限凸轮上有四个凸轮撞片,其中两个为限速撞片,两个为限位撞片,每个撞片分别布置在一个轴向高度上,与不同轴向高度的两个限速开关和两个限位开关一一对应。当设备往一个方向转动,首先该转动方向的限速撞片触及电限速开关,设备减速到达极限位置后,该转动方向的电限位撞片触及限位开关实现转动停止功能。
38.实施例
39.为了验证本发明方案的有效性,进行如下产品设计。
40.如图1、图2所示,转角范围超360
°
的机械和电气限位机构主要包括以下部分:转动轴1、轴承2、机械拨块3、机械挡块4、机械撞块5、弹簧6-1、弹簧动块6-2、弹簧定块6-3,电限凸轮7、电限速开关8,10、电限位开关9,11等。在轴承2的内圈安装转动轴1,外圈安装机械撞块5,转动轴1固定机械拨块3,使机械拨块3随轴承2的内圈联动,机构从零位状态开始转动,机械拨块3和机械撞块5存在α角度差;机械挡块4安装在设备非转动外壳固定处,零位状态下与机械撞块5存在β角度差。机械撞块5固定电限凸轮7,使电限凸轮7随轴承2的外圈联动。
41.如图1、图2所示,弹簧6-1一端固定在机械撞块5上,一端固定在设备非转动外壳上。在机械撞块5达到正负α β极限角度限位后,在转动轴1的回转过程中,带动机械拨块3回转,因为α角度差的缘故,机械撞块5和电限凸轮7未联动,因此,通过弹簧6-1将机械撞块5回转,同时带动电限凸轮7脱离电限速开关8,10、电限位开关9,11。弹簧在零位状态下为非受力状态,在正负α β极限位置拉力最大,可以保证在回转过程中及时带动机械撞块回调。
42.如图3、图4、图5所示,以零位状态为起点,机械撞块5和机械拨块3之间存在α角度差,机械撞块5和机械挡块4之间存在β角度差,机械拨块3随转动轴1(即轴承2的内圈转动),机械撞块5随轴承2的外圈转动,存在α角度差可以保证机械拨块3转动的极限角度比机械撞块5转动的极限角度大2α角度,机械撞块单独转动角度为
±
β角度,因此增加角度差后可以实现-β-α到 β α的角度范围,即2α 2β角度,可以通过增加α角度值实现超360
°
。
43.如图6所示,电限凸轮7的挡块设计成两个限速、两个限位凸轮的形式,每个凸轮分别置于不同的高度层,通过凸轮撞片触及对应高度的电限速限位开关8,10,其中两个为限速凸轮,两个为限位凸轮,限速凸轮比限位凸轮提前触及电限速限位开关8,10,提前进行降速。
44.该机构的装配过程为:
45.首先,将轴承2安装入机械撞块5槽内,槽的内侧顶住轴承2外圈一边,将电限凸轮7的直口顶住轴承2外圈的另一边,电限凸轮7和机械撞块5之间通过螺钉进行紧固。其次,将安装好的轴承2、机械撞块5、电限凸轮7集成安装到转动轴1上,转动轴1端面上安装机械拨块3,同时,机械拨块3顶住轴承2的内圈,机械拨块3通过圆周外圈的四个均布销钉孔固定销钉定位在转动轴1上,然后通过圆周内圈的螺钉进行紧固。然后,将弹簧动块6-2安装在机械撞块5的端面处,弹簧动块6-2尾部的自制螺钉进行紧固,将弹簧定块6-3安装在设备非转动外壳上,通过法兰盘上的螺钉进行紧固。然后,将弹簧6-1的两端设计成环形结构,一端连接
弹簧动块6-2,一端连接弹簧定块6-3。最后,确定好正反转时限速限位开关的位置后,将电限速开关8,10、电限位开关9,11螺钉紧固在设备非转动外壳上。
46.以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
47.以上所述实施例仅表达了本技术的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本技术范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。因此,本技术的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。