技术特征:
1.一种处理pv阵列的电致发光(el)图像的方法,包括从所述el图像中提取所述pv阵列的pv阵列子区段的多个框架,所述pv阵列子区段包括所述pv阵列的一个或多个pv模块;从所提取的框架中确定所述pv阵列子区段的具有最高图像质量的参考框架;执行所提取的框架与所述参考框架的图像对准以生成经图像对准的框架;以及处理所述经图像对准的框架以产生所述pv阵列子区段的具有比所述参考框架更高的分辨率的经增强图像。2.如权利要求1所述的方法,其特征在于,从所述图像中提取所述框架包括确定所述图像中的每个pv模块的相应拐角点;以及基于每个pv模块的所标识的拐角点来构造每个pv模块的相应框架。3.如权利要求2所述的方法,其特征在于,确定所述图像中的每个pv模块的相应拐角点包括对在不同图像中重复的特定pv模块的相应拐角点进行聚类;以及计算针对相应拐角点的每个聚类的相应平均位置。4.如任一前述权利要求所述的方法,其特征在于,确定具有最高图像质量的参考框架包括基于所述框架的锐度、信噪比和完整性中的至少一者来评估每一框架的图像质量。5.如任一前述权利要求所述的方法,其特征在于,还包括在执行图像对准之前以堆叠布置来布置所提取的框架。6.如权利要求5所述的方法,其特征在于,所述pv模块的相应拐角点以堆叠布置来堆叠,并且执行图像对准包括将所提取的框架中的每个pv模块的相应拐角点与所述参考框架中的所述pv模块的对应拐角点对准。7.如任何前述权利要求所述的方法,其特征在于,处理所述经图像对准的框架包括根据每个框架中的所述pv模块对所述经图像对准的框架进行编组;并且对经图像对准的框架的每个编组执行图像平均以获得针对每个pv模块的相应经增强框架。8.如权利要求7所述的方法,其特征在于,所述图像平均基于加权图像堆叠平均和/或深度卷积神经网络结构。9.如权利要求7或8所述的方法,其特征在于,还包括根据所述pv阵列子区段中的每个pv模块的位置,将每个经增强框架与水平索引和垂直索引相关联;以及根据其水平和垂直索引布置所述经增强框架以产生所述pv阵列子区段的所述经增强图像。10.如权利要求7到9中任一项所述的方法,其特征在于,还包括缩放每个经增强框架的相应图像强度。11.如任一前述权利要求所述的方法,其特征在于,还包括将所述pv阵列子区段的所述经增强图像映射到所述pv阵列子区段的底图上,所述底图包括每个pv模块的地理位置。12.如权利要求11所述的方法,其特征在于,将所述经增强图像映射到所述底图上包括对所述经增强图像进行定向以将所述经增强图像中的所述pv阵列子区段与所述底图中的所述pv阵列子区段对准。13.如权利要求12所述的方法,其特征在于,所述pv阵列子区段的每个el图像包括图像标识符,并且将所述经增强图像进行定向包括将特定el图像的所述图像标识符与其pv模块被表征在所述特定el图像中的每个经增
强框架相关联;以及基于与每个经增强框架相关联的所述图像标识符来确定所述经增强图像的定向。14.如权利要求11到13中任一项所述的方法,其特征在于,所述地理位置包括gps坐标。15.如任一前述权利要求所述的方法,其特征在于,所述多个框架是所述pv阵列子区段的连贯框架。16.一种用于处理pv阵列的el图像的图像处理设备,包括图像处理器,被配置成从所述el图像中提取pv阵列的pv阵列子区段的多个框架,所述pv阵列子区段包括所述pv阵列的一个或多个pv模块;从所提取的框架中确定所述pv阵列子区段的具有最高图像质量的参考框架;执行所提取的框架与所述参考框架的图像对准以生成经图像对准的框架;以及处理所述经图像对准的框架以产生所述pv阵列子区段的具有比所述参考框架更高的分辨率的经增强图像。17.如权利要求16所述的图像处理设备,其特征在于,所述图像处理器还被配置成通过以下方式从所述图像中提取所述框架:确定所述图像中的每个pv模块的相应拐角点;以及基于每个pv模块的所标识的拐角点来构造针对每个pv模块的相应框架。18.如权利要求17所述的图像处理设备,其特征在于,所述图像处理器还被配置成通过以下方式确定每个pv模块的相应拐角点:对在不同图像中重复的特定pv模块的相应拐角点进行聚类;以及计算针对相应拐角点的每个聚类的相应平均位置。19.如权利要求16到18中任一项所述的图像处理设备,其特征在于,所述图像处理器还被配置成通过基于所述框架的锐度、信噪比和完整性中的至少一者评估每一框架的所述图像质量来确定具有最高图像质量的参考框架。20.如权利要求16到19中任一项所述的图像处理设备,其特征在于,所述图像处理器还被配置成在执行图像对准之前以堆叠布置来布置所提取的框架。21.如权利要求20所述的图像处理设备,其特征在于,所述pv模块的相应拐角点以所述堆叠布置来堆叠,并且所述图像处理器还被配置成通过将所提取的框架中的每个pv模块的相应拐角点与所述参考框架中的所述pv模块的对应拐角点对准来执行图像对准。22.如权利要求16到21中任一项所述的图像处理设备,其特征在于,所述图像处理器还被配置成通过根据每一框架中的pv模块对经图像对准的框架进行编组,来处理所述经图像对准的框架,并对经图像对准的框架的每一编组进行图像平均以获得针对每个pv模块的相应经增强框架。23.如权利要求22所述的图像处理设备,其特征在于,所述图像处理器还被配置成基于加权图像堆叠平均和/或深度卷积神经网络结构来执行图像平均。24.如权利要求22或23所述的方法,其特征在于,所述图像处理器还被配置成根据所述pv阵列子区段中的每个pv模块的位置,将每个经增强框架与水平索引和垂直索引相关联;以及根据其水平和垂直索引布置所述经增强框架以产生所述pv阵列子区段的所述经增强图像。
25.如权利要求22到24中任一项所述的图像处理设备,其特征在于,所述图像处理器还被配置成缩放每个经增强框架的相应图像强度。26.如权利要求16到25中任一项所述的图像处理设备,其特征在于,所述图像处理器还被配置成将所述pv阵列子区段的所述经增强图像映射到所述pv阵列子区段的底图上,所述底图包括每个pv模块的地理位置。27.如权利要求26所述的图像处理设备,其特征在于,所述图像处理器还被配置成通过将所述经增强图像进行定向以所述经增强图像中的所述pv阵列子区段与所述底图中的所述pv阵列子区段对准来将所述经增强图像映射到所述底图上。28.如权利要求27所述的图像处理设备,其特征在于,所述pv阵列子区段的每个el图像包括图像标识符,并且所述图像处理器还被配置成通过以下方式将所述经增强图像进行定向:将特定el图像的所述图像标识符与其pv模块被表征在所述特定el图像中的每个经增强框架相关联;以及基于与每个经增强框架相关联的所述图像标识符来确定所述经增强图像的定向。29.如权利要求26到28中任一项所述的图像处理设备,其特征在于,所述地理位置包括gps坐标。30.如权利要求16到29中任一项所述的图像处理设备,其特征在于,所述多个框架是所述pv阵列子区段的连贯框架。31.一种控制空中交通工具的移动的方法,所述空中交通工具具有用于捕获pv阵列的el图像的相机,所述方法包括:控制所述空中交通工具沿飞行路径飞行,以捕获所述pv阵列的对应pv阵列子区段的el图像;从所捕获的el图像的至少一些中导出相应的图像质量参数;以及基于所述相应图像质量参数来动态调整所述空中交通工具沿所述飞行路径的飞行速度以用于捕获所述pv阵列子区段的el图像。32.如权利要求31所述的方法,其特征在于,所述图像质量参数包括snr扫描因子和运动模糊扫描因子。33.如权利要求32所述的方法,其特征在于,所述snr扫描因子取决于目标snr、测得的snr以及所捕获的包括所述pv阵列子区段的特定pv模块的el图像的估计数量。34.如权利要求32或33所述的方法,其特征在于,所述运动模糊扫描因子是测得的对象偏转与预定义最大对象偏转的比率。35.如权利要求31所述的方法,其特征在于,基于所述相应图像质量参数来动态调整所述空中交通工具沿所述飞行路径的飞行速度包括基于所述snr扫描因子和所述运动模糊扫描因子来导出目标飞行速度;以及动态调整所述空中交通工具的当前飞行速度以匹配所述目标飞行速度。36.如权利要求35所述的方法,其特征在于,导出所述目标飞行速度包括将所述snr扫描因子和所述运动模糊扫描因子中的最小者应用于所述空中交通工具的当前飞行速度以导出目标扫描速度;以及如果所述目标扫描速度在所述空中交通工具的最大飞行速度之下,则选择所述目标扫
描速度作为所述目标飞行速度。37.如权利要求36所述的方法,其特征在于,还包括:如果所述目标扫描速度超过所述空中交通工具的所述最大飞行速度,则选择所述最大飞行速度作为所述目标飞行速度。38.如权利要求35到37中任一项所述的方法,其特征在于,还包括基于用户输入因子来调整所述目标飞行速度。39.如权利要求31到38中任一项所述的方法,其特征在于,还包括:在控制所述空中交通工具沿所述飞行路径飞行以捕获所述pv阵列的对应pv阵列子区段的el图像之前,检测来自所述pv阵列的一个或多个pv模块发射的el信号。40.如权利要求39所述的方法,其特征在于,还包括:在检测所述el信号之前,将所述空中交通工具操纵至初始位置,其中所述空中交通工具的偏航轴和所述相机的光轴垂直于地面。41.如权利要求39或40所述的方法,其特征在于,还包括将所述空中交通工具导航至所述el信号的位置。42.如权利要求39到41中任一项所述的方法,其特征在于,检测由所述pv阵列的所述一个或多个pv模块发射的el信号包括绕所述交通工具的偏航轴旋转所述空中交通工具,同时增加所述相机的光轴角度,直到检测到所述el信号。43.如权利要求42所述的方法,其特征在于,所述相机的光轴角度从0
°
增加至70
°
。44.如权利要求42或43所述的方法,其特征在于,所述相机的光轴角度以递减的俯仰速度来增加。45.如权利要求42到44中任一项所述的方法,其特征在于,所述空中交通工具以递减的偏航速度旋转。46.如权利要求42到45中任一项所述的方法,其特征在于,还包括:在旋转所述空中交通工具之前,将所述空中交通工具操纵至预定义高度。47.如权利要求31到46中任一项所述的方法,其特征在于,还包括:通过以下方式将所述相机的视野(fov)与所述对应pv阵列子区段对准:确定所述对应pv阵列子区段中的参考pv模块的相应关键点;从针对所述相机的fov的所述相应关键点中导出要与所述对应pv阵列子区段对准的目标对准点;执行透视变换以将所述相应关键点与所述目标对准点对准;以及基于所述透视变换来将所述空中交通工具操纵至所述对应pv阵列子区段。48.如权利要求47所述的方法,其特征在于,将所述相机的fov与所述对应pv阵列子区段对准还包括:将所述空中交通工具操纵至适当高度,其中所述对应pv阵列子区段在所述适当高度处以预定义尺寸比率在所述相机的fov内。49.如权利要求48所述的方法,其特征在于,所述对应pv阵列子区段以所述预定义尺寸比率占据所述相机的fov的80%至90%。50.如权利要求31到49中任一项所述的方法,其特征在于,还包括根据测得的图像锐度来动态调整所述相机的焦点。51.如权利要求31到50中任一项所述的方法,其特征在于,所述空中交通工具还包括与所述相机的光轴对准的光源,并且所述方法还包括除了在捕获所述pv阵列的所述el图像时
之外,向所述光源供电。52.一种空中交通工具,包括:相机,用于捕获pv阵列的el图像;推进设备,用于致动所述空中交通工具的移动;以及控制器,通信地耦合至所述相机和所述推进设备,并且被配置成:控制所述空中交通工具沿飞行路径飞行,以捕获所述pv阵列的对应pv阵列子区段的el图像;从所捕获的el图像的至少一些中导出相应的图像质量参数;以及基于所述相应图像质量参数来动态调整所述空中交通工具沿所述飞行路径的飞行速度以用于捕获所述pv阵列子区段的所述el图像。53.如权利要求52所述的空中交通工具,其特征在于,所述图像质量参数包括snr扫描因子和运动模糊扫描因子。54.如权利要求53所述的空中交通工具,其特征在于,所述snr扫描因子取决于目标snr、测得的snr以及所捕获的包括所述pv阵列子区段的特定pv模块的el图像的估计数量。55.如权利要求53或54所述的空中交通工具,其特征在于,所述运动模糊扫描因子是测得的对象偏转与预定义最大对象偏转的比率。56.如权利要求52所述的空中交通工具,其特征在于,所述控制器还被配置成通过以下方式基于所述相应的图像质量参数来动态调整所述空中交通工具沿所述飞行路径的飞行速度:基于所述snr扫描因子和所述运动模糊扫描因子来导出目标飞行速度;以及动态调整所述空中交通工具的当前飞行速度以匹配所述目标飞行速度。57.如权利要求56所述的空中交通工具,其特征在于,所述控制器还被配置成通过以下方式导出所述目标飞行速度:将所述snr扫描因子和所述运动模糊扫描因子中的最小者应用于所述空中交通工具的当前飞行速度以导出目标扫描速度;以及如果所述目标扫描速度在所述空中交通工具的最大飞行速度之下,则选择所述目标扫描速度作为所述目标飞行速度。58.如权利要求57所述的空中交通工具,其特征在于,所述控制器还被配置成:如果所述目标扫描速度超过所述空中交通工具的最大飞行速度,则选择所述最大飞行速度作为所述目标飞行速度。59.如权利要求56到58中任一项所述的空中交通工具,其特征在于,所述控制器还被配置成基于用户输入因子来调整所述目标飞行速度。60.如权利要求52到59中任一项所述的空中交通工具,其特征在于,所述控制器还被配置成:检测由来自所述pv阵列的一个或多个pv模块发射的el信号,所述pv阵列具有阵列轴,并且所述一个或多个pv模块与所述阵列轴对准并且包括平坦表面:确定所述pv阵列的所述阵列轴;以及控制所述相机沿所述阵列轴捕获所述pv阵列的所述el图像,同时动态调整所述推进设备以将所述相机的光轴对准成垂直于所述一个或多个pv模块的平坦表面。
61.如权利要求60所述的空中交通工具,其特征在于,所述控制器还被配置成在定位所述el信号之前通过以下方式将所述空中交通工具设定成初始位置:动态调整所述推进设备以将所述空中交通工具的偏航轴设定成垂直于地面;以及动态调整所述相机的光轴以垂直于地面。62.如权利要求60或61所述的空中交通工具,其特征在于,所述控制器还被配置成动态调整所述推进设备,以将所述空中交通工具导航至所述el信号的位置。63.如权利要求60到62中任一项所述的空中交通工具,其特征在于,所述控制器还被配置成通过动态调整所述推进设备以使所述空中交通工具绕所述空中交通工具的偏航轴旋转,同时增加所述相机的光轴角度直到定位由所述pv阵列的所述一个或多个pv模块发射的所述el信号为止,来定位所述el信号。64.如权利要求63所述的空中交通工具,其特征在于,所述相机的光轴角度从0
°
增加至70
°
。65.如权利要求63或64所述的空中交通工具,其特征在于,所述相机的光轴角度以递减的俯仰速度来增加。66.如权利要求63到64中任一项所述的空中交通工具,其特征在于,所述空中交通工具以递减的偏航速度旋转。67.如权利要求63到66中任一项所述的空中交通工具,其特征在于,所述控制器还被配置成动态调整所述推进设备,以在旋转所述空中交通工具之前将所述空中交通工具操纵至预定义高度。68.如权利要求60到67中任一项所述的空中交通工具,其特征在于,所述控制器还被配置成:通过以下方式将所述相机的视野(fov)与所述对应pv阵列子区段对准:确定所述对应pv阵列子区段中的参考pv模块的相应关键点;从针对所述相机的fov的所述相应关键点中导出要与所述对应pv阵列子区段对准的目标对准点;执行透视变换以将所述相应关键点与所述目标对准点对准;以及动态调整所述推进设备以基于所述透视变换来将所述空中交通工具操纵至所述对应pv阵列子区段。69.如权利要求68所述的空中交通工具,其特征在于,所述控制器还被配置成通过动态调整所述推进设备以将所述空中交通工具操纵至适当高度来将所述相机的fov对准到所述对应pv阵列子区段,其中所述对应pv阵列子区段在所述适当高度处以预定义尺寸比率在所述相机的fov内。70.如权利要求69所述的空中交通工具,其特征在于,所述对应pv阵列子区段以所述预定义尺寸比率占据所述相机的fov的80%至90%。71.如权利要求60到70中任一项所述的空中交通工具,其特征在于,所述控制器还被配置成根据测得的图像锐度来动态调整所述相机的焦点。72.如权利要求60到71中任一项所述的空中交通工具,其特征在于,还包括与所述相机的光轴对准的光源,并且所述控制器还被配置成除了在捕获所述pv阵列的所述el图像时之外,向所述光源供电。73.一种从由具有相机的空中交通工具捕获的pv阵列的pv阵列子区段的el图像中获得
所述pv阵列子区段的经增强图像的方法,所述方法包括:控制所述空中交通工具沿飞行路径飞行,以捕获所述pv阵列的对应pv阵列子区段的el图像;从所捕获的el图像的至少一些中导出相应的图像质量参数;基于所述相应图像质量参数来动态调整所述空中交通工具沿所述飞行路径的飞行速度,以用于捕获所述pv阵列子区段的所述el图像;从所述el图像中提取所述pv阵列子区段的多个框架;从所提取的框架中确定所述pv阵列子区段的具有最高图像质量的参考框架;执行所提取的框架与所述参考框架的图像对准以生成经图像对准的框架;以及处理所述经图像对准的框架以产生所述pv阵列子区段的具有比所述参考框架更高的分辨率的经增强图像。74.一种用于捕获和处理pv阵列的pv阵列子区段的el图像的系统,包括:空中交通工具,包括:相机,用于捕获pv阵列的el图像;推进设备,用于致动所述空中交通工具的移动;以及控制器,通信地耦合至所述相机和所述推进设备,并且被配置成:控制所述空中交通工具沿飞行路径飞行,以捕获所述pv阵列的对应pv阵列子区段的el图像;从所捕获的el图像的至少一些中导出相应的图像质量参数;以及基于所述相应图像质量参数来动态调整所述空中交通工具沿所述飞行路径的飞行速度以用于捕获所述pv阵列子区段的所述el图像;以及图像处理设备,包括:图像处理器,被配置成:从所述el图像中提取pv阵列的pv阵列子区段的多个框架,所述pv阵列子区段包括所述pv阵列的一个或多个pv模块;从所提取的框架中确定所述pv阵列子区段的具有最高图像质量的参考框架;执行所提取的框架与所述参考框架的图像对准以生成经图像对准的框架;以及处理所述经图像对准的框架以产生所述pv阵列子区段的具有比所述参考框架更高的分辨率的经增强图像。
技术总结
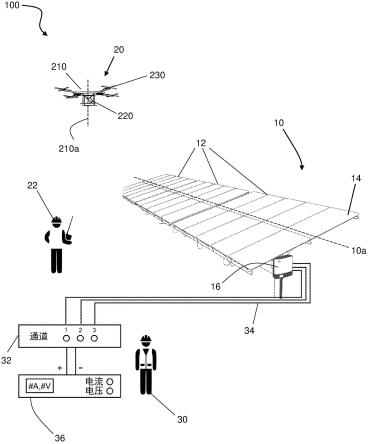
本文公开了捕获和处理PV阵列(40)的电致发光(EL)图像(1910)的方法(400)。在所描述的实施例中,方法400包括控制空中交通工具(20)沿飞行路径飞行以捕获PV阵列(40)的对应PV阵列子区段(512b)的EL图像(1910),从至少一些所捕获的EL图像中获得相应图像质量参数,基于相应图像质量参数来动态调整该空中交通工具沿飞行路径的飞行速度以用于捕获PV阵列子区段(512b)的EL图像(1910),从EL图像(1910)中提取PV阵列子区段(512b)的多个框架(1500);从所提取的框架(2100)中确定PV阵列子区段(512b)的具有最高图像质量的参考框架;执行所提取的框架(2100)与参考框架的图像对准以生成经图像对准的框架(2130),并且对经图像对准的框架(2130)进行处理以产生PV阵列子区段(512b)的具有比参考框架更高的分辨率的经增强图像(2140)。还公开了针对其方法的系统、图像处理设备以及空中交通工具。设备以及空中交通工具。设备以及空中交通工具。
技术研发人员:卡尔
受保护的技术使用者:量化能源实验室私人有限公司
技术研发日:2020.12.30
技术公布日:2022/8/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。