技术特征:
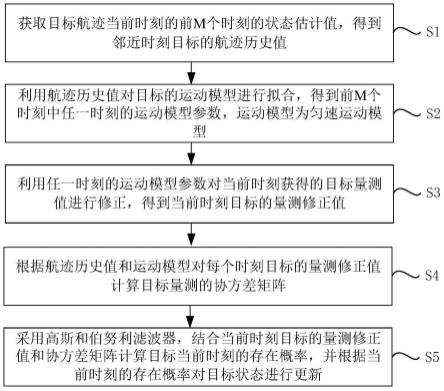
1.一种雷达慢速弱机动目标量测修正伯努利滤波方法,其特征在于,包括步骤:s1、获取目标航迹当前时刻的前m个时刻的状态估计值,得到邻近时刻目标的航迹历史值;s2、利用所述航迹历史值对目标的运动模型进行拟合,得到所述前m个时刻中任一时刻的运动模型参数,所述运动模型为匀速运动模型;s3、利用所述任一时刻的运动模型参数对所述当前时刻获得的目标量测值进行修正,得到当前时刻目标的量测修正值;s4、根据所述航迹历史值和所述运动模型对每个时刻目标的量测修正值计算目标量测的协方差矩阵;s5、采用高斯和伯努利滤波器,结合所述当前时刻目标的量测修正值和所述协方差矩阵计算目标当前时刻的存在概率,并根据所述当前时刻的存在概率对目标状态进行更新。2.根据权利要求1所述的雷达慢速弱机动目标量测修正伯努利滤波方法,其特征在于,步骤s2包括:s21、利用总体最小二乘方法,根据所述航迹历史值中目标邻近时刻航迹的纬度坐标和运动速度计算目标的北向速度估计值和任一时刻的纬度估计值;s22、利用总体最小二乘方法,根据所述航迹历史值中目标邻近时刻航迹的经度坐标和运动速度计算目标的东向速度估计值和任一时刻的经度估计值。3.根据权利要求2所述的雷达慢速弱机动目标量测修正伯努利滤波方法,其特征在于,所述北向速度估计值和所述任一时刻的纬度估计值为:其中,为任一时刻的纬度估计值,为北向速度估计值,a
b
为系数矩阵,σ
b
为增广矩阵b'=[-b,a
b
]的最小奇异值,b为目标邻近时刻航迹的纬度坐标,b=[b
k-m
,b
k-m 1
,
…
,b
k
]
t
,k为当前时刻,m为当前时刻向后回溯的时刻数,i为单位矩阵;系数矩阵a
b
为:其中,t为相邻时刻的时间间隔,k为当前时刻,r
b
为地球短轴半径。4.根据权利要求2所述的雷达慢速弱机动目标量测修正伯努利滤波方法,其特征在于,所述东向速度估计值和所述任一时刻的经度估计值为:其中,为任一时刻的经度估计值,为东向速度估计值,a
l
为系数矩阵,σ
l
为增广矩阵l'=[-l,a
l
]的最小奇异值,l为目标邻近时刻航迹的经度坐标,l=[l
k-m
,l
k-m 1
,
…
,l
k
]
t
,k为当前时刻,m为当前时刻向后回溯的时刻数,i为单位矩阵;
系数矩阵a
l
为:其中,t为相邻时刻的时间间隔,k为当前时刻,为目标所处的纬度圆半径,r为地球平均半径,b
k-m
为k-m时刻目标所在的纬度。5.根据权利要求2所述的雷达慢速弱机动目标量测修正伯努利滤波方法,其特征在于,步骤s3包括:s31、利用所述北向速度估计值、所述任一时刻的纬度估计值、所述东向速度估计值和所述任一时刻的经度估计值计算当前时刻目标量测坐标的估计值:其中,为当前时刻的纬度坐标,为当前时刻的经度坐标,为任一时刻的纬度估计值,为任一时刻的经度估计值,m为任一时刻距离当前时刻的时刻数,δt为每一帧数据的时间间隔,为北向速度估计值,为东向速度估计值,r
b
为地球短轴半径,r
l
为目标所处的纬度圆半径;s32、利用所述北向速度估计值和所述东向速度估计值计算当前时刻目标量测速度的估计值:其中,为北向速度估计值,为东向速度估计值;s33、由所述当前时刻目标量测坐标的估计值和所述当前时刻目标量测速度的估计值得到所述当前时刻目标的量测修正值:其中,为当前时刻目标的量测修正值。6.根据权利要求1所述的雷达慢速弱机动目标量测修正伯努利滤波方法,其特征在于,所述目标量测的协方差矩阵为:其中,为目标量测的协方差矩阵,为量测误差均值,e为期望函数,z
m
为k-m时刻至k时刻的航迹历史值,为k-m时刻至k时刻的量测修正值。7.根据权利要求1所述的雷达慢速弱机动目标量测修正伯努利滤波方法,其特征在于,
步骤s5包括:s51、利用上一时刻目标的存在概率预测当前时刻目标的存在概率,利用上一时刻所有高斯成分的均值预测当前时刻每个高斯成分的均值,利用上一时刻所有高斯成分的协方差矩阵预测当前时刻每个高斯成分的协方差矩阵,利用上一时刻存活高斯成分的权值预测当前时刻存活高斯成分的权值和新生高斯成分的权值;s52、利用所述当前时刻目标的量测修正值和预测的所述当前时刻每个高斯成分的均值更新每个高斯成分的均值,利用预测的所述当前时刻每个高斯成分的协方差矩阵更新每个高斯成分的协方差矩阵,利用所述当前时刻目标的量测修正值和预测的所述当前时刻每个高斯成分的权值更新每个高斯成分的权值,根据预测的所述当前时刻目标的存在概率和更新后的所述每个高斯成分的权值更新目标的存在概率:其中,r
k|k-1
为预测的当前时刻目标的存在概率,为更新后的高斯成分的权值,p
f
为雷达的虚警概率;s53、判断更新后的所述目标的存在概率是否满足预设条件,若满足,则根据更新后的所述每个高斯成分的均值和更新后的所述每个高斯成分的权值设置当前时刻所述目标状态,如不满足,则将当前时刻的所述目标状态更新为上一时刻目标状态的预测。8.根据权利要求7所述的雷达慢速弱机动目标量测修正伯努利滤波方法,其特征在于,所述预设条件为:更新后的所述目标的存在概率大于0.5。9.根据权利要求7所述的雷达慢速弱机动目标量测修正伯努利滤波方法,其特征在于,根据更新后的所述每个高斯成分的均值和更新后的所述每个高斯成分的权值设置当前时刻所述目标状态,包括,将所有所述高斯成分的权值中权值最大的所述高斯成分的均值设置为所述当前时刻所述目标状态。10.一种雷达慢速弱机动目标量测修正伯努利滤波装置,其特征在于,包括:航迹历史值获取模块,用于获取目标航迹当前时刻的前m个时刻的状态估计值,得到航迹历史值;运动模型拟合模块,用于利用所述航迹历史值对目标的运动模型进行拟合,得到所述前m个时刻中任一时刻的运动模型参数,所述运动模型为匀速运动模型;目标量测值修正模块,用于利用所述任一时刻的运动模型参数对所述当前时刻获得的目标量测值进行修正,得到当前时刻目标的量测修正值;协方差矩阵量测模块,用于根据所述航迹历史值和所述运动模型对每个时刻目标的量测修正值计算目标量测的协方差矩阵;目标状态更新模块,用于采用高斯和伯努利滤波器,结合所述当前时刻目标的量测修正值和所述协方差矩阵计算目标当前时刻的存在概率,并根据所述当前时刻的存在概率对目标状态进行更新。
技术总结
本发明涉及一种雷达慢速弱机动目标量测修正伯努利滤波方法及装置,滤波方法包括:获取目标航迹当前时刻的前M个时刻的状态估计值,得到邻近时刻目标的航迹历史值;利用航迹历史值对目标运动模型进行拟合,得到前M个时刻中任一时刻的运动模型参数;利用任一时刻的运动模型参数对当前时刻的目标量测值进行修正,得到当前时刻目标的量测修正值;根据航迹历史值和运动模型对每个时刻目标的量测修正值计算目标量测的协方差矩阵;采用高斯和伯努利滤波器,结合当前时刻目标的量测修正值和协方差矩阵计算目标当前时刻的存在概率,并根据当前时刻的存在概率对目标状态进行更新。该滤波方法能够针对低分辨雷达对弱机动目标的跟踪提供高精度的滤波值。踪提供高精度的滤波值。踪提供高精度的滤波值。
技术研发人员:杨志伟 胡敏 孙浦洋 徐玉凤 徐星苑
受保护的技术使用者:西安电子科技大学
技术研发日:2022.04.08
技术公布日:2022/8/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。