技术特征:
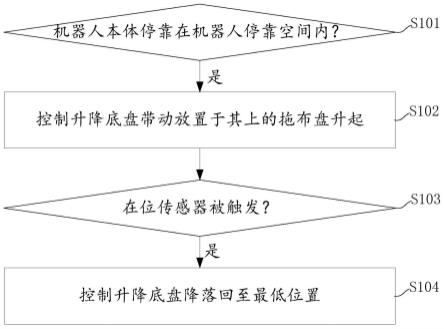
1.一种清洁机器人系统的控制方法,其特征在于,所述清洁机器人系统包括清洁机器人和清洁基站,所述清洁基站设有机器人停靠空间,所述清洁机器人包括机器人本体和拖布盘,所述机器人本体包括拖布旋转轴,所述清洁基站包括设于所述机器人停靠空间内的升降底盘,所述拖布旋转轴设有在位传感器,所述控制方法包括:检测所述机器人本体是否停靠在所述机器人停靠空间内;在检测到所述机器人本体停靠在所述机器人停靠空间内的情况下,控制所述升降底盘带动放置于其上的所述拖布盘升起;检测所述在位传感器是否被触发;在所述在位传感器被触发的情况下,控制所述升降底盘降落回最低位置。2.根据权利要求1所述的控制方法,其特征在于,所述机器人停靠空间内设有位置传感器,所述控制方法还包括:在所述在位传感器未被触发的情况下,控制所述位置传感器检测所述升降底盘的当前位置;在所述当前位置处于最高位置的情况下,控制所述升降底盘降落回所述最低位置,并发出关于所述拖布盘未安装成功的第二信息。3.根据权利要求2所述的控制方法,其特征在于,所述控制方法还包括:在所述当前位置未达到所述最高位置的情况下,控制所述升降底盘升起至所述最高位置,以及启动所述检测所述在位传感器是否被触发的步骤。4.根据权利要求1所述的控制方法,其特征在于,在所述在位传感器被触发的情况下,控制所述升降底盘降落回最低位置之后,所述控制方法还包括:检测所述在位传感器是否被触发;在所述在位传感器被触发的情况下,发出关于所述拖布盘安装成功的第一信息;在所述在位传感器未被触发的情况下,发出关于所述拖布盘未安装成功的第二信息。5.一种清洁机器人系统的控制装置,其特征在于,所述清洁机器人系统包括清洁机器人和清洁基站,所述清洁基站设有机器人停靠空间,所述清洁机器人包括机器人本体和拖布盘,所述机器人本体包括拖布旋转轴,所述清洁基站包括设于所述机器人停靠空间内的升降底盘,所述拖布旋转轴设有在位传感器,所述控制装置包括:第一检测模块,用于检测所述机器人本体是否停靠在所述机器人停靠空间内;第一控制模块,用于在检测到所述机器人本体停靠在所述机器人停靠空间内的情况下,控制所述升降底盘带动放置于其上的所述拖布盘升起;第二检测模块,用于检测所述在位传感器是否被触发;第二控制模块,在所述在位传感器被触发的情况下,控制所述升降底盘降落回最低位置。6.一种清洁机器人系统的控制方法,其特征在于,所述清洁机器人系统包括清洁机器人和清洁基站,所述清洁基站设有机器人停靠空间,所述清洁机器人包括机器人本体和拖布盘,所述机器人本体包括拖布旋转轴,所述清洁基站包括设于所述机器人停靠空间内的升降底盘,所述升降底盘设有压力传感器,所述升降底盘设有第一电磁件,所述拖布盘设有第二金属片或第三永磁体,所述控制方法包括:检测所述机器人本体是否停靠在所述机器人停靠空间内;
在检测到所述机器人本体停靠在所述机器人停靠空间内的情况下,控制所述升降底盘升起;在所述升降底盘升起之后,控制所述第一电磁件通电,以使所述第一电磁件与所述第二金属片或所述第三永磁体磁吸;检测所述压力传感器是否被触发;在所述压力传感器被触发的情况下,控制所述升降底盘降落回最低位置。7.根据权利要求6所述的控制方法,其特征在于,所述机器人停靠空间内设有位置传感器,所述控制方法还包括:在所述压力传感器未被触发的情况下,控制所述位置传感器检测所述升降底盘的实际位置是否达到最高位置;在所述实际位置达到所述最高位置的情况下,控制所述升降底盘降落回最低位置;在所述实际位置未达到所述最高位置的情况下,控制所述升降底盘继续上升,以及启动所述检测所述压力传感器是否被触发的步骤。8.根据权利要求6所述的控制方法,其特征在于,所述拖布旋转轴设有在位传感器,在所述压力传感器被触发的情况下,在所述控制所述升降底盘降落回最低位置之后,所述控制方法还包括:检测所述在位传感器是否被触发;在所述在位传感器被触发的情况下,停止控制或发出关于所述拖布盘拆卸失败的第三信息;在所述在位传感器未被触发的情况下,发出关于所述拖布盘拆卸成功的第四消息。9.根据权利要求6所述的控制方法,其特征在于,所述控制所述升降底盘升起,包括:控制所述升降底盘升起至预设位置,所述预设位置低于所述升降底盘的最高位置;所述在所述升降底盘升起之后,控制所述第一电磁件通电,包括:在所述升降底盘升起至所述预设位置之后,控制所述第一电磁件通电。10.根据权利要求6所述的控制方法,其特征在于,所述在所述升降底盘升起之后,控制所述第一电磁件通电之前,所述控制方法还包括:检测所述升降底盘的当前位置是否是最高位置;所述在所述升降底盘升起之后,控制所述第一电磁件通电,包括:在所述升降底盘升起至所述最高位置的情况下,控制所述第一电磁件通电。11.根据权利要求10所述的控制方法,其特征在于,所述在所述升降底盘升起至所述最高位置的情况下,控制所述第一电磁件通电,包括:在所述升降底盘升起至所述最高位置的情况下,控制所述第一电磁件的电流值在预设电流阈值范围内递增。12.一种清洁机器人系统的控制装置,其特征在于,所述清洁机器人系统包括清洁机器人和清洁基站,所述清洁基站设有机器人停靠空间,所述清洁机器人包括机器人本体和拖布盘,所述机器人本体包括拖布旋转轴,所述清洁基站包括设于所述机器人停靠空间内的升降底盘,所述升降底盘设有压力传感器,所述升降底盘设有第一电磁件,所述拖布盘设有第二金属片或第三永磁体,所述控制装置包括:
第一检测模块,用于检测所述机器人本体是否停靠在所述机器人停靠空间内;第一控制模块,用于在检测到所述机器人本体停靠在所述机器人停靠空间内的情况下,控制所述升降底盘升起;第三控制模块,用于在所述升降底盘升起之后,控制所述第一电磁件通电,以使所述第一电磁件与所述第二金属片或所述第三永磁体磁吸;第三检测模块,用于检测所述压力传感器是否被触发;第二控制模块,用于在所述压力传感器被触发的情况下,控制所述升降底盘降落回最低位置。
技术总结
本发明公开一种清洁机器人系统的控制方法及装置,清洁机器人系统包括清洁机器人和清洁基站,清洁基站设有机器人停靠空间,清洁机器人包括机器人本体和拖布盘,机器人本体包括拖布旋转轴,清洁基站包括设于机器人停靠空间内的升降底盘,拖布旋转轴设有在位传感器,控制方法包括:检测机器人本体是否停靠在机器人停靠空间内;在检测到机器人本体停靠在机器人停靠空间内的情况下,控制升降底盘带动放置于其上的拖布盘升起;检测在位传感器是否被触发;在在位传感器被触发的情况下,控制升降底盘降落回最低位置。上述方案可以解决清洁机器人在更换拖布盘时,由于手动更换而导致拆装效率较低的问题。率较低的问题。率较低的问题。
技术研发人员:刘一燃
受保护的技术使用者:杭州萤石软件有限公司
技术研发日:2022.05.13
技术公布日:2022/8/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。