1.本实用新型涉及特种车辆辅助设备技术领域,尤其是一种大/特大型运输车空间形位状态估计实时监测系统。
背景技术:
2.21世纪,我国工业化进程将进一步加快,工业设备大型化、重型化将成为发展趋势,石化、冶金、电力等单件重量300吨以上的设备将越来越多,千吨重的超重设备也将相继问世,这就决定了大型物件运输在交通运输领域所占越来越重要的地位。
3.根据《道路大型物件运输规范》(jt/t 1295-2019)的规定,大型物件,即总长度≥28米,或总宽度≥3.75米,或总高度≥4.5米,或总重量≥100吨的物件。大型物件运输是指对这些超长、超宽、超高、超重的货物运输的大/特大型运输。随着我国经济建设的迅速发展,各地的水电站以及大型工厂都在不断的兴建之中,因此关系这些工程能否成功完成的相关大型设备的运输问题就显得十分重要。大型物件运输车因其超重超高超宽,往往一出门便受到诸多限制,曾让许多司机视为畏途,跨省走单骑更是困难重重。
4.大/特大型运输车在弯道、桥洞、坡道、收费站以及红绿灯、电力线、通讯电缆、广告牌等各种空障情况下需要运输人员对车辆行为状态和障碍物测量,并根据经验判断车辆通过性,长时间的测量容易造成交通拥堵,同时测量人员的人身安全存在较大威胁;而过度依赖经验判断,易造成极大的安全事故,2019年5月18日杭州天桥坍塌事件正是由此引起。
技术实现要素:
5.本实用新型的目的在于提供一种利用传感器阵列节点测量车辆相关数据并进行滤波处理,将得到的车辆空间形位状态信息显示在手持终端上,从而最大程度上提高车辆通过性,提高运输效率,有效降低安全隐患的大/特大型运输车空间形位状态估计实时监测系统。
6.为实现上述目的,本实用新型采用了以下技术方案:一种大/特大型运输车空间形位状态估计实时监测系统,包括:
7.多个传感器阵列节点,用于采集大型运输车关键位置到障碍物的距离信息;
8.手持终端,将传感器阵列节点采集的数据汇总并实时显示;
9.所述传感器阵列节点包括:
10.第一mcu微控制器,使能第一测距模块和第二测距模块,接收第一测距模块和第二测距模块返回的测量数据信息,对测量数据滤波后传输到显示屏和第一通信模块,同时接收和处理按键模块和第一通信模块传入的指令信息;
11.第一测距模块,测量车辆最低点和地面的距离信息;
12.第二测距模块,测量车辆最高点到障碍物的距离信息;
13.第一通信模块,将传感器节点得到的测量信息发送给手持终端并接收手持终端的指令;
14.显示屏,显示单个节点的测量数据和节点的基本属性信息;
15.按键模块,控制节点工作和待机状态和设置节点基本属性信息;
16.电源模块,向第一通信模块和按键模块直接供电,通过第一通信模块供电或按键模块激活第一mcu微控制器,实现整个传感器阵列节点供电;
17.所述第一mcu微控制器分别与第一测距模块、第二测距模块、第一通信模块、第一触摸屏双向通讯,所述按键模块的信号输出端与第一mcu微控制器的信号输入端相连;
18.所述手持终端包括:
19.第二mcu微控制器,接收第二通信模块的数据信息,计算出大型运输车离地间隙、净空高度、侧倾角和俯仰角,并与测量阈值进行比较,计算结果实时传递给触摸显示屏和报警模块,同时接收和处理触摸显示屏传入的指令信息;
20.第二通信模块,接收各个传感器节点发送的信息并向传感器节点指令;
21.触摸显示屏,显示车辆空间形位状态信息;
22.报警模块,当大型运输车离地间隙或净空高度或侧倾角或俯仰角超出阈值时,提供声音提示;
23.所述第二mcu微控制器分别与第二通信模块、第二触摸屏双向通讯,所述第二mcu微控制器的信号输出端与报警模块的信号输入端相连;所述第一通信模块与第二通信模块之间无线通信。
24.所述第一mcu微控制器和第二mcu微控制器均采用stm32f103c8t6单片机。
25.所述第一测距模块采用激光测距传感器,所述第二测距模块采用超声波测距传感器。
26.所述第一通信模块和第二通信模块均采用zigbee无线通信模块。
27.所述第一测距模块包括:
28.红外激光二极管,用于产生调制的光波;
29.高压偏置电路,降低电源模块输出的电压波纹同时使输出电压在一定范围可调;
30.雪崩二极管apd,将接收到的光信号转换成电信号;
31.选频滤波电路,获得所需的低频参考信号;
32.放大电路,用于放大微弱的电信号,同时有较高的信号灵敏度和较低的噪声;
33.所述红外激光二极管的输出端与雪崩二极管apd的第一输入端相连,电源电路向高压偏置电路供电,高压偏置电路的输出端与雪崩二极管apd的第二输入端相连,雪崩二极管apd的输出端与选频滤波电路的输入端相连,选频滤波电路的输出端与放大电路的输入端相连,放大电路的输出端与第一mcu微控制器的信号输入端相连。
34.所述高压偏置电路包括芯片u1,所述芯片u1采用max5026芯片,芯片u1的1、2引脚接地,芯片u1的2脚通过电容c6与电源模块相连,芯片u1的3脚通过电阻r1与第一mcu微控制器的i/o口相连,芯片u1的4、5、6脚并联,芯片u1的6脚依次通过电容c1、c2、c3、二极管d4的正极接雪崩二极管apd的电压输入端,电感l7跨接在芯片u1的6脚和电容c1之间,二极管d5的阳极与电容c1的一端相连,二极管d5的阴极与二极管d8的阳极相连,二极管d8的阴极与电容c1的另一端相连,二极管d6的阳极与电容c2的一端相连,二极管d6的阴极与二极管d9的阳极相连,二极管d9的阴极与电容c2的另一端相连,二极管d7的阳极与电容c3的一端相连,二极管d7的阴极与二极管d10的阳极相连,二极管d10的阴极与电容c3的另一端相连。
35.由上述技术方案可知,本实用新型的有益效果为:第一,本实用新型能够改变大/特大型运输车需要人工在道路上测量的现状,实时掌握大/特大型运输车在各种工况下的空间形位状态并提前预警,提高车辆通过性,提高运输效率,有效降低安全隐患;第二,本实用新型能够有效避免了测量仪器本身的噪声,提高了测量数据的准确性;第三,本实用新型不仅能够实现对大/特大型运输车重要位置距离信息的实时测量,还能够依据各传感器阵列网络节点测量数据和车辆尺寸参数估算出实时道路工况和大/特大型运输车俯仰角、侧倾角等空间形位状态,通过用户交互界面实现数据可视化;根据设定阈值提前预警,能够在各种道路工况下有效避免人为主观误判,提前做出响应,杜绝此类公共安全事故的发生;第四,本实用新型传感器阵列网络节点提供多种附着方式,可满足不同工作场景下的需求,使用简单灵活,方便安装与拆卸,组网灵活,可扩展性强。
附图说明
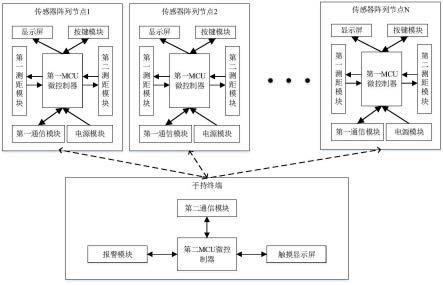
36.图1是本实用新型系统结构图;
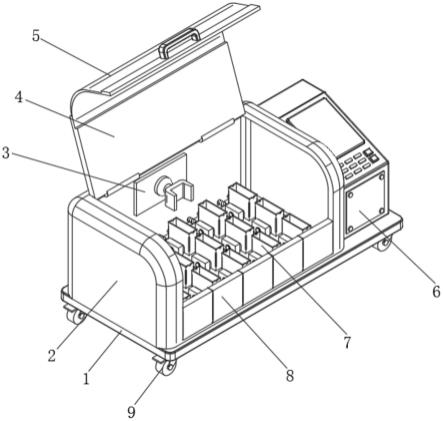
37.图2是本实用新型传感器阵列节点的布置位置示意图;
38.图3是本实用新型中第一测距模块的电路原理图;
39.图4是本实用新型中高压偏置电路的电路原理图;
40.图5是树状结构网络拓扑原理示意图;
41.图6是第一mcu微控制器的引脚分布及其外围电路原理图。
具体实施方式
42.如图1所示,一种大/特大型运输车空间形位状态估计实时监测系统,包括:
43.多个传感器阵列节点,用于采集大型运输车关键位置到障碍物的距离信息;
44.手持终端,将传感器阵列节点采集的数据汇总并实时显示;
45.所述传感器阵列节点包括:
46.第一mcu微控制器,使能第一测距模块和第二测距模块,接收第一测距模块和第二测距模块返回的测量数据信息,对测量数据滤波后传输到显示屏和第一通信模块,同时接收和处理按键模块和第一通信模块传入的指令信息;
47.第一测距模块,测量车辆最低点和地面的距离信息;
48.第二测距模块,测量车辆最高点到障碍物的距离信息;
49.第一通信模块,将传感器节点得到的测量信息发送给手持终端并接收手持终端的指令;
50.显示屏,显示单个节点的测量数据和节点的基本属性信息;
51.按键模块,控制节点工作和待机状态和设置节点基本属性信息;
52.电源模块,向第一通信模块和按键模块直接供电,通过第一通信模块供电或按键模块激活第一mcu微控制器,实现整个传感器阵列节点供电;
53.如图6所示,所述第一mcu微控制器分别与第一测距模块、第二测距模块、第一通信模块、第一触摸屏双向通讯,所述按键模块的信号输出端与第一mcu微控制器的信号输入端相连;
54.所述手持终端包括:
55.第二mcu微控制器,接收第二通信模块的数据信息,计算出大型运输车离地间隙、净空高度、侧倾角和俯仰角,并与测量阈值进行比较,计算结果实时传递给触摸显示屏和报警模块,同时接收和处理触摸显示屏传入的指令信息;
56.第二通信模块,接收各个传感器节点发送的信息并向传感器节点指令;
57.触摸显示屏,显示车辆空间形位状态信息;
58.报警模块,当大型运输车离地间隙或净空高度或侧倾角或俯仰角超出阈值时,提供声音提示;
59.所述第二mcu微控制器分别与第二通信模块、第二触摸屏双向通讯,所述第二mcu微控制器的信号输出端与报警模块的信号输入端相连;所述第一通信模块与第二通信模块之间无线通信。如图6所示,所述第一mcu微控制器和第二mcu微控制器均采用stm32f103c8t6单片机。所述第一测距模块采用激光测距传感器,所述第二测距模块采用超声波测距传感器。所述第一通信模块和第二通信模块均采用zigbee无线通信模块。
60.如图3所示,所述第一测距模块包括:
61.红外激光二极管,用于产生调制的光波;
62.高压偏置电路,降低电源模块输出的电压波纹同时使输出电压在一定范围可调;
63.雪崩二极管apd,将接收到的光信号转换成电信号;
64.选频滤波电路,获得所需的低频参考信号;
65.放大电路,用于放大微弱的电信号,同时有较高的信号灵敏度和较低的噪声;
66.所述红外激光二极管的输出端与雪崩二极管apd的第一输入端相连,电源电路向高压偏置电路供电,高压偏置电路的输出端与雪崩二极管apd的第二输入端相连,雪崩二极管apd的输出端与选频滤波电路的输入端相连,选频滤波电路的输出端与放大电路的输入端相连,放大电路的输出端与第一mcu微控制器的信号输入端相连。
67.如图4所示,所述高压偏置电路包括芯片u1,所述芯片u1采用max5026芯片,芯片u1的1、2引脚接地,芯片u1的2脚通过电容c6与电源模块相连,芯片u1的3脚通过电阻r1与第一mcu微控制器的i/o口相连,芯片u1的4、5、6脚并联,芯片u1的6脚依次通过电容c1、c2、c3、二极管d4的正极接雪崩二极管apd的电压输入端,电感l7跨接在芯片u1的6脚和电容c1之间,二极管d5的阳极与电容c1的一端相连,二极管d5的阴极与二极管d8的阳极相连,二极管d8的阴极与电容c1的另一端相连,二极管d6的阳极与电容c2的一端相连,二极管d6的阴极与二极管d9的阳极相连,二极管d9的阴极与电容c2的另一端相连,二极管d7的阳极与电容c3的一端相连,二极管d7的阴极与二极管d10的阳极相连,二极管d10的阴极与电容c3的另一端相连。高压偏置电路结构简单、输出电压纹波低,同时,具有输出电压在一定范围可调的优点。
68.在工作时,传感器阵列节点执行节点状态进行自我诊断,若出现故障,在显示屏显示故障码;手持终端执行终端状态进行自我诊断,若出现故障,在触摸显示屏显示故障码;传感器阵列节点与手持终端建立通信;手持终端设置各传感器阵列节点的归零偏差、标准偏差和测量阈值;手持终端使能传感器阵列节点,采集大型运输车离地间隙和净空高度信息,将采集的数据滤波处理,得到精确数据;传感器阵列节点将数据传输给手持终端;将各传感器阵列节点采集的数据作为输入,第二mcu微控制器输出当前道路工况和当前大/特大型运输车空间形位状态并通过触摸显示屏实时显示;手持终端将大型运输车实时空间形位
状态与设定的离地间隙、净空高度、侧倾角和俯仰角进行比较,若超出阈值,则手持终端警报。
69.所述传感器阵列节点在大/特大型运输车周边附着方式有两种:第一种是螺栓连接,用于固定传感器阵列节点的安装;第二种是磁吸式连接,用于实际使用过程中临时增加的特殊位置的传感器阵列节点的安装。依据三点确定一个平面,传感器阵列节点布置位置如图2所示。考虑到大/特大型运输车多于野外操作,工作环境特殊多样,第一测距模块和第二测距模块需要在室外晴天强光、大雾天气、阴雨天气、路面扬尘、高温等环境下可靠工作,传感器阵列节点外壳采用防水防尘设计。
70.根据在网络中所具备的功能不同,网络节点分为传感器末端节点、传感器路由节点、手持终端节点3种类型。其工作原理示意图如图5所示。系统工作时,距离终端较远传感器阵列网络末端节点主要完成距离数据的测量和发送;距离手持终端较近的传感器网络阵列路由节点除了具备距离数据测量功能,将采集的数据发送给手持终端外,还可以接收距离相对手持终端较远传感器阵列网络节点发送到链路上的数据并对其进行数据转发;手持终端对各个传感器网络阵列节点的测量数据汇聚、储存并计算。
71.综上所述,本实用新型能够改变大/特大型运输车需要人工在道路上测量的现状,实时掌握大/特大型运输车在各种工况下的空间形位状态并提前预警,提高车辆通过性,提高运输效率,有效降低安全隐患;本实用新型能够有效避免了测量仪器本身的噪声,提高了测量数据的准确性。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。