1.本发明涉及牵引电机控制领域,具体说是一种轨道交通永磁同步电机输出转矩脉动的消除策略。
背景技术:
2.在轨道交通牵引传动系统中,牵引变流器通常由单相pwm整流器、中间直流环节和三相pwm逆变器三部分组成。单相pwm整流器的输入功率与输出功率都存在二倍电网频率的脉动分量,导致牵引变流器的中间直流侧电压会存在二倍电网频率的脉动电压。在直流侧脉动电压的影响下,电机定子电压和定子电流中会出现严重的拍频现象,电机的输出转矩也会出现很大的脉动分量,对电机的控制性能造成巨大影响。
3.目前,通常通过频率补偿的方法来抑制电机定子电流的拍频现象和转矩的脉动现象,具体为动态调整给定频率补偿函数。该方法虽然可以有效控制定子电流中的拍频分量达到最小值,但却无法消除输出转矩中的脉动分量。
技术实现要素:
4.针对现有技术中存在的缺陷,本发明的目的在于提供一种轨道交通永磁同步电机输出转矩脉动的消除策略,用以消除转矩中的脉动分量。
5.为达到以上目的,本发明采取的技术方案是:
6.一种轨道交通永磁同步电机输出转矩脉动的消除策略,其特征在于,包括如下步骤:
7.步骤1:通过低通滤波器提取直流母线电压的直流分量u
dc
,并将该值用于永磁电机的矢量控制算法;
8.步骤2:通过电流采样和角度采样分别得到永磁电机三相定子电流i
abc
和转子位置角θr,并通过clark变换(3s/2s变换)和park变换(2s/2r变换)将三相定子电流变换到两相同步旋转坐标系下得到实际的d、q轴电流id和iq;
9.步骤3:通过广义积分器(sogi)锁频环提取d轴和q轴电流中的直流分量i
d0
、i
q0
和二倍电网频率的脉动分量i
d2
、i
q2
,确定转矩脉动分量为零时d轴和q轴电流脉冲分量i
d2
、i
q2
的关系;
10.步骤3:通过广义积分器(sogi)锁频环提取d轴和q轴电流中的直流分量i
d0
、i
q0
和二倍电网频率的脉动分量i
d2
、i
q2
,确定转矩脉动分量为零时d轴和轴电流脉冲分量i
d2
、i
q2
的关系;
11.步骤4:设计谐振控制器,谐振控制器输入的参考值设置为零,反馈值设置为i
q2-ki
d2
,k为根据步骤3中得到的i
d0
、i
q0
和电机参数计算得到的常数,谐振控制器输出为频率补偿函数δf;
12.步骤5:将δf补偿到电机的运行频率fr上,得到补偿后的频率f
r,cmp
;
13.步骤6:将补偿后的f
r,cmp
用于永磁电机的矢量控制算法;
14.进一步,步骤2中所述clark变换矩阵为式(1),park变换矩阵为式(2):
[0015][0016][0017]
进一步,步骤3所述确定转矩脉动分量为零时d轴和q轴电流脉动分量i
d2
、i
q2
的关系的具体步骤为:
[0018]
步骤3-1,根据两相同步旋转坐标系下的转矩方程得到转矩二倍电网的脉动分量t
e2
和d轴、q轴电流中脉动分量i
d2
、i
q2
的关系,即式(3):
[0019]
t
e2
=3n
p
((ψr (l
d-lq)i
d0
)iq2 (l
d-lq)i
d2iq0
)/2
ꢀꢀꢀ
(3);
[0020]
步骤3-2,令步骤3-1中的式(3)为零,得到转矩脉动分量为零时d,q轴电流脉动分量i
d2
、i
q2
的关系,即式(4):
[0021][0022]
进一步,步骤4中所述的谐振控制器表达式为式(5):
[0023][0024]
步骤4中所述谐振控制器输出的频率补偿函数为式(6):
[0025]
δf=g(s)*(ki
d2-i
q2
)
ꢀꢀꢀꢀ
(6)。进一步,步骤5中所述补偿后的频率f
r,cmp
表达式为式(7):
[0026]fr,cmp
=δf frꢀꢀꢀ
(7)。
[0027]
本发明所述的一种轨道交通永磁同步电机输出转矩脉动的消除策略,其有益效果为:本发明所采用的频率补偿策略是通过对d,q轴电流中的脉动分量进行跟踪,可以消除转矩中的脉动分量,进一步提升电机转矩的控制精度。
附图说明
[0028]
本发明有如下附图:
[0029]
图1直流电压波动下的定子电流(a)和转矩波形图(b);
[0030]
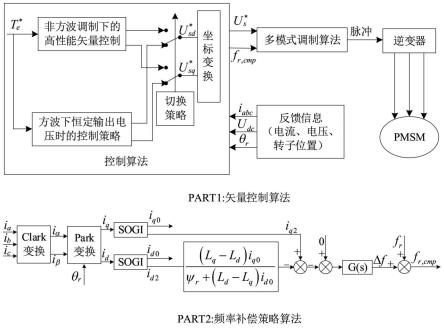
图2加入频率补偿策略后的矢量控制策略框图;
[0031]
图3加入传统频率补偿策略及本发明所提频率补偿策略后的转矩波形图;
[0032]
图4转矩频谱分析结果图:(a)加入传统频率补偿策略;(b)加入闭环频率补偿策略。
具体实施方式
[0033]
以下结合附图1~4对本发明作进一步详细说明。
[0034]
图1为直流电压波动下永磁电机运行于98hz时对应的定子电流和转矩波形。由图可知,定子电流中会存在很大的频率为2hz(100hz-98hz)左右的脉动分量,转矩中会存在频率为100hz的脉动分量。
[0035]
本技术发明一种轨道交通永磁同步电机输出转矩脉动的消除策略,其原理图如图2所示,其中图2的part1部分为大功率永磁电机的矢量控制算法,part2部分为本技术发明的转矩脉动消除算法。该算法通过广义积分器(sogi)锁频环提取d、q轴电流中的二倍电网频率脉动分量,并通过设计谐振控制器来对电流中的脉动分量进行闭环跟踪,可以消除转矩中的脉动分量。具体步骤如下:
[0036]
步骤1:根据电流传感器采得的电机三相电流ia、ib、ic,根据转子位置传感器采得的电机的转子位置角θr,通过clarke变换(abc坐标系变换至αβ坐标系)获得αβ坐标系下的定子电流iα、iβ,通过park变换获得dq坐标系下的定子电流id、iq。
[0037]
其中clark变换矩阵为式(1),park变换矩阵为式(2):
[0038][0039][0040]
步骤2:通过广义积分器(sogi)锁频环提取d轴和q轴电流中的直流分量i
d0
、i
q0
和二倍电网频率的脉动分量i
d2
、i
q2
,确定转矩脉动分量为零时d轴和q轴电流脉冲分量i
d2
、i
q2
的关系;
[0041]
转矩脉动分量与d轴和q轴电流脉冲分量i
d2
、i
q2
的关系为:
[0042]
t
e2
=3n
p
((ψr (l
d-lq)i
d0
)i
q2
(l
d-lq)i
d2iq0
)/2
ꢀꢀꢀ
(3);
[0043]
步骤3:设计谐振控制器,谐振控制器输入的参考值设置为零,反馈值设置为i
q2-ki
d2
,k为根据步骤2中得到的i
d0
、i
q0
和电机参数计算得到的常数,谐振控制器输出为频率补偿函数δf;
[0044]
其中k的表达式为:
[0045][0046]
谐振控制器的传递函数为:
[0047][0048]
谐振控制器输出为频率补偿函数δf为:
[0049]
δf=g(s)*(ki
d2-i
q2
)
ꢀꢀꢀ
(6);
[0050]
步骤4:将δf补偿到电机的运行频率fr上,得到补偿后的频率f
r,cmp
;
[0051]
补偿后的频率f
r,cm
表达式为:
[0052]fr,cmp
=δf frꢀꢀꢀ
(7);
[0053]
步骤5:将补偿后的f
r,cmp
用于永磁电机的矢量控制算法;
[0054]
图3为加入传统频率补偿策略及本发明所提频率补偿策略后的转矩波形图。由图可知,加入传统的频率补偿算法之后,转矩中的脉动分量得到一定的抑制,但仍存在部分分量未被消除;而加入本技术发明的闭环频率补偿算法后,转矩中的脉动分量得到进一步的抑制。
[0055]
图4为转矩频谱分析结果。其中图(a)为加入传统频率补偿策略后的转矩频谱分析结果,由图可知,转矩中仍存在1n
·
m左右的转矩脉动分量;图(b)为加入闭环频率补偿策略后的转矩频谱分析结果,由图可知,转矩中仅剩0.01n
·
m左右的转矩脉动分量,基本被完全消除。
[0056]
本说明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
