1.本发明涉及机器人关节减速器,特别涉及一种大扭矩高刚性机器人关节减速器。
背景技术:
2.目前,机器人关节减速器主要采用谐波传动和摆线传动两种技术实现。
3.谐波传动的核心是柔性齿轮产生可控弹性变形,并与刚性齿轮相啮合来传递运动和动力的齿轮传动。该种传动形式转动惯量和启动力矩大、传动效率低、刚性差,同时由于柔轮周期性地发生变形,因而产生交变应力,使之易于产生疲劳破坏导致其寿命短。
4.摆线传动是一种以短副外摆线的内等距曲线和圆弧为共轭齿廓的少齿差行星传动装置,其主要零件摆线轮制造工艺复杂,基于摆线传动的减速器通常采用二级传动,第一级传动为行星齿轮传动,第二级采用摆线传动,这就导致传动结构复杂的同时重量体积难以减小。
5.在谐波传动与摆线传动中,啮合副的相对运动状态类似于水平推动物体沿斜面滑动的过程,这一啮合原理决定了谐波传动与摆线传动效率低。此外,现有机器人谐波减速器和摆线减速器,由于传动结构设计,无法实现机器人运动臂共面运动,导致关节偏载严重,影响机器人动态性能及关节寿命。
6.因此,开发一种大扭矩高刚性机器人关节减速器具有重大意义。
技术实现要素:
7.本发明的目的是提供一种大扭矩高刚性机器人关节减速器,以解决现有技术中存在的问题。
8.为实现本发明目的而采用的技术方案是这样的,一种大扭矩高刚性机器人关节减速器,包括双排太阳轮、三联行星轮组、输入齿轮轴、连接盘ⅰ、输出齿圈和连接盘ⅱ。
9.所述连接盘ⅰ和连接盘ⅱ均具有内嵌齿圈。所述连接盘ⅰ和连接盘ⅱ同轴且相对布置。所述输入齿轮轴支承在连接盘ⅰ和连接盘ⅱ之间。所述输出齿圈套设在输入齿轮轴外围。
10.所述双排太阳轮包括套设在输入齿轮轴上的太阳齿轮ⅰ和太阳齿轮ⅱ。
11.所述三联行星轮组具有多个三联行星轮。每个三联行星轮均包括套设在花键轴上的行星齿轮ⅰ、行星齿轮ⅱ和行星齿轮ⅲ。多个三联行星轮环绕双排太阳轮布置。
12.所述行星齿轮ⅰ与太阳齿轮ⅰ外啮合。所述连接盘ⅱ与各行星齿轮ⅰ远离太阳齿轮ⅰ的一侧内啮合。所述行星齿轮ⅲ与太阳齿轮ⅱ外啮合。所述连接盘ⅰ与各行星齿轮ⅲ远离太阳齿轮ⅱ的一侧内啮合。所述行星齿轮ⅲ、行星齿轮ⅰ、太阳齿轮ⅰ和太阳齿轮ⅱ形成一级传动。所述行星齿轮ⅱ与输出齿圈内啮合,形成第二级传动。
13.进一步,所述太阳齿轮ⅰ和太阳齿轮ⅱ通过平键与输入齿轮轴连接,实现动力的输入。
14.进一步,所述太阳齿轮ⅰ和太阳齿轮ⅱ通过轴肩和套筒进行轴向定位。
15.进一步,采用螺母压紧的形式将行星齿轮ⅰ、行星齿轮ⅱ和行星齿轮ⅲ固定在花键轴上。
16.进一步,所述连接盘ⅰ和连接盘ⅱ的端面上具有若干螺纹连接孔。所述螺纹连接孔的孔位沿减速器轴成均布圆环排列。所述螺纹连接孔用于与机器人肢体机械连接。所述输出齿圈的外壁上具有多个螺纹连接孔。所述螺纹连接孔用于与机器人肢体机械连接。
17.进一步,所述太阳齿轮ⅰ和太阳齿轮ⅱ的结构相同。所述双排太阳轮、三联行星轮组和输出齿圈的齿数通过传动比关系进行限定。
[0018][0019]
式中,i为传动比。z16为行星齿轮ⅰ的齿轮齿数。z10为输出齿圈的齿轮齿数。z19为太阳齿轮ⅰ的齿轮齿数。z11为行星齿轮ⅱ的齿轮齿数。
[0020]
进一步,所述连接盘ⅰ的端面上设置有连接通孔。所述连接通孔中设有用于托承输入齿轮轴的角接触球轴承。所述连接通孔外侧设有端盖。所述连接盘ⅱ的端面上设置有连接盲孔。所述连接盲孔中设有用于托承输入齿轮轴的角接触球轴承。
[0021]
所述输入齿轮轴通过角接触球轴承支承在连接盘ⅰ和连接盘ⅱ之间。所述输入齿轮轴靠近连接盘ⅰ的一端穿出端盖。所述输入齿轮轴通过角接触球轴承和端盖进行轴线定位和轴向定位。
[0022]
进一步,所述连接盘ⅰ和连接盘ⅱ通过十字交叉轴承分别安装在输出齿圈的两个端口处。所述输出齿圈的两个端口处设置有衔接外沿。所述十字交叉轴承的外壁紧贴衔接外沿的内壁。所述连接盘ⅰ和连接盘ⅱ通过螺栓在轴向上与十字交叉轴承的内圈连接固定。所述输出齿圈通过螺栓与十字交叉轴承的外圈连接。十字交叉轴承可以同时承受轴向载荷和径向载荷,可以大大提高减速器的刚性。
[0023]
本发明还公开一种机器人关节装置,包括上机械臂、下机械臂和上述的任意一项大扭矩高刚性机器人关节减速器。所述上机械臂、下机械臂与关节减速器连接。
[0024]
本发明还公开一种机器人,包括机身和设置于机身内的关节减速器。所述机身包括至少两节肢体,相邻两节肢体通过关节减速器连接。所述关节减速器具体为上述的任意一项大扭矩高刚性机器人关节减速器。
[0025]
本发明的技术效果是毋庸置疑的:
[0026]
a.传动结构紧凑、传动效率高,传动比范围宽;
[0027]
b.行星三联齿轮中的左右齿轮同时与输入轴上布置的双排太阳轮和左右连接盘中镶嵌的内齿圈啮合,实现一级传动。行星三联齿轮的中间齿轮与输出齿圈啮合,实现二级传动;
[0028]
c.可以实现机器人运动臂共面安装与运动,实现减小机器人关节偏载的目的;
[0029]
d.十字交叉轴承实现减速器结构封装,该轴承可同时承受径向载荷和轴向载荷,大大提高减速器整体刚性和增大传递扭矩的效果。
附图说明
[0030]
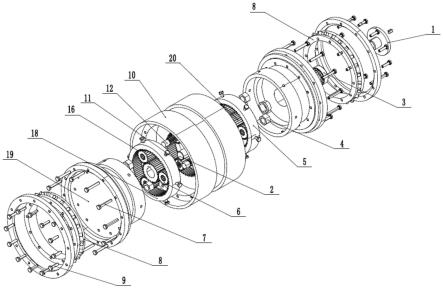
图1为减速器爆炸图;
[0031]
图2为减速器纵剖面构造图;
[0032]
图3为减速器a-a面剖面构造图;
[0033]
图4为减速器b-b面剖面构造图;
[0034]
图5为减速器输出盘一侧正视图;
[0035]
图6为减速器行星齿轮-行星轮轴装配组件图;
[0036]
图7为减速器行星轮轴零件图;
[0037]
图8为减速器输入齿轮轴零件图;
[0038]
图9为机器人关节装置示意图。
[0039]
图中:端盖1、输入齿轮轴2、角接触球轴承3、螺母4、连接盘ⅰ5、行星齿轮ⅲ6、十字交叉轴承8、螺栓9、输出齿圈10、行星齿轮ⅱ11、花键轴12、行星齿轮ⅰ16、连接盘ⅱ18、太阳齿轮ⅰ19、太阳齿轮ⅱ20。
具体实施方式
[0040]
下面结合实施例对本发明作进一步说明,但不应该理解为本发明上述主题范围仅限于下述实施例。在不脱离本发明上述技术思想的情况下,根据本领域普通技术知识和惯用手段,做出各种替换和变更,均应包括在本发明的保护范围内。
[0041]
实施例1:
[0042]
本实施例提供一种大扭矩高刚性机器人关节减速器,包括双排太阳轮、三联行星轮组、输入齿轮轴2、连接盘ⅰ5、输出齿圈10 和连接盘ⅱ18。
[0043]
所述连接盘ⅰ5和连接盘ⅱ18均具有内嵌齿圈。所述连接盘ⅰ5 和连接盘ⅱ18同轴且相对布置。所述输入齿轮轴2通过角接触球轴承3支承在连接盘ⅰ5和连接盘ⅱ18之间。所述输出齿圈10套设在输入齿轮轴2外围。
[0044]
所述双排太阳轮包括套设在输入齿轮轴2上的太阳齿轮ⅰ19和太阳齿轮ⅱ20。所述太阳齿轮ⅰ19和太阳齿轮ⅱ20对称布置于减速器内部。
[0045]
所述三联行星轮组具有多个三联行星轮。每个三联行星轮均包括套设在花键轴12上的行星齿轮ⅰ16、行星齿轮ⅱ11和行星齿轮
ⅲꢀ
6。采用螺母4压紧的形式将行星齿轮ⅰ16、行星齿轮ⅱ11和行星齿轮ⅲ6固定在花键轴12上。输出行星轮与输入行星轮固连在一起,不仅使得他们能够同步转动,还能使减速器结构更加紧凑,有效的提高空间利用率和降低减速器的重量和体积。行星齿轮ⅰ16和行星齿轮ⅲ6对称布置于减速器内部。多个三联行星轮环绕双排太阳轮布置。
[0046]
太阳齿轮ⅰ19和太阳齿轮ⅱ20对称布置,行星齿轮ⅰ16和行星齿轮ⅲ6对称布置,该结构特点不仅能够使减速器内部传动零件在轴向上能够抵消不平衡力,而且有效提高了空间利用率和大幅度提高了传动力矩。
[0047]
所述行星齿轮ⅰ16与太阳齿轮ⅰ19外啮合。所述连接盘ⅱ18 与各行星齿轮ⅰ16远离太阳齿轮ⅰ19的一侧内啮合。所述行星齿轮ⅲ6与太阳齿轮ⅱ20外啮合。所述连接盘ⅰ5与各行星齿轮ⅲ6远离太阳齿轮ⅱ20的一侧内啮合。所述行星齿轮ⅲ6、行星齿轮ⅰ16、太阳齿轮ⅰ19和太阳齿轮ⅱ20形成一级传动。所述行星齿轮ⅱ11与输出齿圈10内啮合,形成第二级传动。
[0048]
工作时,所述双排太阳轮与输入齿轮轴2连接实现动力的输入。驱动力通过输入齿轮轴2传递给轴向对称布置的太阳齿轮ⅰ19和太阳齿轮ⅱ20,起到平衡偏航力矩的作用。双
排太阳轮通过行星齿轮ⅰ16和行星齿轮ⅲ6将动力传递给三联行星轮组,使三联行星轮组与连接盘ⅰ5和连接盘ⅱ18的内置齿圈啮合产生自转与公转。行星齿轮ⅱ11将运动传递至输出齿圈10。
[0049]
本发明专利所采用的技术方案很好的解决了上述问题。提出一种基于行星齿轮传动原理的机器人关机减速器设计方案,传动结构更紧凑、传动效率更高,传动比范围宽。该减速器设计中,行星轮为三联齿轮,行星三联齿轮中的左右齿轮同时与输入轴上布置的双排太阳轮和左右连接盘中镶嵌的内齿圈啮合,实现一级传动。行星三联齿轮的中间齿轮与输出齿圈啮合,实现二级传动。基于左右连接盘对称布置的减速器传动结构形式在两连接盘外侧和输出齿圈打有螺纹孔,分别用于连接装配下机械臂和上机械臂,可以实现机器人运动臂共面安装与运动,实现减小机器人关节偏载的目的。同时,左右连接盘分别采用十字交叉轴承连接输出齿圈,实现减速器结构封装,该轴承可同时承受径向载荷和轴向载荷,大大提高减速器整体刚性和增大传递扭矩的效果。
[0050]
实施例2:
[0051]
本实施例主要结构同实施例1,其中,所述连接盘ⅰ5和连接盘ⅱ18的端面具有多个螺纹连接孔。所述螺纹连接孔的孔位沿减速器轴成均布圆环排列。所述螺纹连接孔用于与机器人肢体机械连接。所述输出齿圈10的外壁上具有多个螺纹连接孔。所述螺纹连接孔用于与机器人肢体机械连接。
[0052]
实施例3:
[0053]
参见图1~图9,本实施例提供一种大扭矩高刚性机器人关节减速器,包括双排太阳轮、三联行星轮组、输入齿轮轴2、连接盘ⅰ5、输出齿圈10和连接盘ⅱ18。
[0054]
所述连接盘ⅰ5和连接盘ⅱ18均具有内嵌齿圈。所述连接盘ⅰ5 和连接盘ⅱ18同轴且相对布置。所述输入齿轮轴2支承在连接盘ⅰ5 和连接盘ⅱ18之间。所述输出齿圈10套设在输入齿轮轴2外围。所述连接盘ⅰ5和连接盘ⅱ18通过十字交叉轴承8分别安装在输出齿圈10的两个端口处,进行减速器封装。所述输出齿圈10的两个端口处设置有衔接外沿。所述十字交叉轴承8的外壁紧贴衔接外沿的内壁。所述连接盘ⅰ5和连接盘ⅱ18通过螺栓9在轴向上与十字交叉轴承8的内圈连接固定。所述输出齿圈10通过螺栓9与十字交叉轴承8的外圈连接。基于十字交叉轴承的特点,十字交叉轴承8可以同时承受轴向载荷和径向载荷,可以大大提高减速器的刚性。
[0055]
所述双排太阳轮包括套设在输入齿轮轴2上的太阳齿轮ⅰ19和太阳齿轮ⅱ20。所述太阳齿轮ⅰ19和太阳齿轮ⅱ20的结构相同。所述太阳齿轮ⅰ19和太阳齿轮ⅱ20轴向对称布置。所述太阳齿轮ⅰ19 和太阳齿轮ⅱ20通过平键与输入齿轮轴2连接,实现动力的输入。所述太阳齿轮ⅰ19和太阳齿轮ⅱ20通过轴肩和套筒进行轴向定位。
[0056]
所述三联行星轮组具有三个三联行星轮。每个三联行星轮均包括套设在花键轴12上的行星齿轮ⅰ16、行星齿轮ⅱ11和行星齿轮
ⅲꢀ
6。采用螺母4压紧的形式将行星齿轮ⅰ16、行星齿轮ⅱ11和行星齿轮ⅲ6固定在花键轴12上。三个行星齿轮均可单独加工,不需要像整体结构加工时每个齿轮留有退刀间隙。本实施例三联行星轮的轴向结构更加紧凑,加工方法更加简单。三个三联行星轮环绕双排太阳轮布置。
[0057]
所述双排太阳轮、三联行星轮组和输出齿圈10的齿数通过传动比关系进行限定。
[0058][0059]
式中,i为传动比。z16为行星齿轮ⅰ16的齿轮齿数。z10为输出齿圈10的齿轮齿数。z19为太阳齿轮ⅰ19的齿轮齿数。z11为行星齿轮ⅱ11的齿轮齿数。
[0060]
所述行星齿轮ⅰ16与太阳齿轮ⅰ19外啮合。所述连接盘ⅱ18 与各行星齿轮ⅰ16远离太阳齿轮ⅰ19的一侧内啮合。所述行星齿轮ⅲ6与太阳齿轮ⅱ20外啮合。所述连接盘ⅰ5与各行星齿轮ⅲ6远离太阳齿轮ⅱ20的一侧内啮合。所述行星齿轮ⅲ6、行星齿轮ⅰ16、太阳齿轮ⅰ19和太阳齿轮ⅱ20形成一级传动。所述行星齿轮ⅱ11与输出齿圈10内啮合,形成第二级传动。
[0061]
所述连接盘ⅰ5和连接盘ⅱ18的端面上具有若干螺纹连接孔。所述螺纹连接孔的孔位沿减速器轴成均布圆环排列。所述螺纹连接孔用于与机器人肢体机械连接。所述输出齿圈10的外壁上具有多个螺纹连接孔。所述螺纹连接孔用于与机器人肢体机械连接。所述连接盘ⅰ5的端面上设置有连接通孔。所述连接通孔中设有用于托承输入齿轮轴2的角接触球轴承3。所述连接通孔外侧设有端盖1。所述连接盘ⅱ18的端面上设置有连接盲孔。所述连接盲孔中设有用于托承输入齿轮轴2的角接触球轴承3。
[0062]
所述输入齿轮轴2通过角接触球轴承3支承在连接盘ⅰ5和连接盘ⅱ18之间。所述输入齿轮轴2靠近连接盘ⅰ5的一端穿出端盖1。所述输入齿轮轴2通过角接触球轴承3和端盖1进行轴线定位和轴向定位。
[0063]
工作时,所述双排太阳轮与输入齿轮轴2连接实现动力的输入。驱动力通过输入齿轮轴2传递给轴向对称布置的太阳齿轮ⅰ19和太阳齿轮ⅱ20,起到平衡偏航力矩的作用。双排太阳轮通过行星齿轮ⅰ16和行星齿轮ⅲ6将动力传递给三联行星轮组,使三联行星轮组与连接盘ⅰ5和连接盘ⅱ18的内置齿圈啮合产生自转与公转。行星齿轮ⅱ11将运动传递至输出齿圈10。
[0064]
实施例4:
[0065]
参见图9,本实施例提供一种机器人关节装置,包括上机械臂、下机械臂和如实施例3中所述的大扭矩高刚性机器人关节减速器。所述上机械臂与输出齿圈10连接。所述下机械臂与连接盘ⅰ5和/ 或连接盘ⅱ18连接。两机械臂可在同一回转平面内进行工作,解决了机器人关节偏载问题,大大节约了减速器的工作空间。
[0066]
实施例5:
[0067]
一种机器人,包括机身和设置于机身内的关节减速器。所述机身包括至少两节肢体,相邻两节肢体通过关节减速器连接。所述关节减速器具体为实施例3中所述的大扭矩高刚性机器人关节减速器。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。