技术特征:
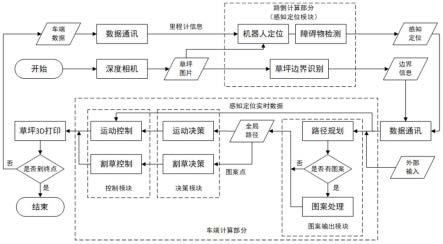
1.一种基于智能割草机器人的草坪3d打印系统,其特征在于,包括:感知定位模块、图案输出模块、决策模块、控制模块,所述感知定位模块,用于草坪边界识别以获得草坪边界坐标信息,将所述草坪边界坐标信息传输至图案输出模块,通过相机与底盘里程计实现联合定位、通过相机实现障碍物检测,获得实时割草机器人位置信息、障碍物信息,并将所述实时割草机器人位置信息、障碍物信息传输给决策模块与控制模块;所述图案输出模块,用于根据所述草坪边界坐标信息进行全局路径规划,并根据输入的割草区域内图案点信息,在原全局路径规划点上加入所述割草区域内图案信息获得全局路径点,并将将所述全局路径点组成的全局路径生成.log文档保存至车载计算单元,提供决策模块读取;所述决策模块,用于基于所述全局路径点,确定割草机器人运动状态,并将决策信息传输至控制模块;所述控制模块,用于基于所述割草机器人运动状态,输出控制量使割草机器人往复运动,并按照所述图案信息进行升降割草,从而实现草坪的3d打印;同时根据所述感知定位模块输出的所述障碍物信息实现动态避障,保证安全。2.根据权利要求1所述的草坪3d打印系统,其特征在于,所述感知定位模块包括草坪边界识别单元、割草机器人定位单元和障碍物检测单元。3.根据权利要求2所述的草坪3d打印系统,其特征在于,所述草坪边界识别单元,用于通过深度相机记录草坪信息,基于resnet_50训练的网络模型进行特征提取,以获得草坪边界,通过图片像素、草坪实际尺寸以及深度相机相对位置,获得所述草坪边界坐标信息;所述割草机器人定位单元,用于包括割草机器人里程计信息,将位置计算后得到的所述实时割草机器人位置信息作为实时基础坐标;通过所述深度相机记录割草机器人割草时的草坪图片,基于yolo_v5训练的网络模型进行割草机器人位置追踪,当追踪到机器人到达草坪边界后消除实时基础坐标累计误差,获得相机与里程计联合定位后的割草机器人位置坐标;所述障碍物检测单元,基于yolo_v5训练的网络模型进行割草区域内障碍物检测,输出障碍物在割草区域内坐标,并将其换算为割草机器人相对坐标。4.根据权利要求1所述的草坪3d打印系统,其特征在于,所述图案输出模块,包括路径规划单元和图案处理单元。5.根据权利要求4所述的草坪3d打印系统,其特征在于,所述路径规划单元,用于通过所述草坪边界坐标信息,人为指定割草方向,完成覆盖式路径规划,并结合割草机器人往复式割草的运动特性,对规划路径进行优化;所述图案处理单元,用于读取输入的图案的灰度信息确定图案区域,确定图案点坐标信息与高度信息,将其与路径规划单元输出的路径点结合,得到带有图案信息的全局路径。6.根据权利要求5所述的草坪3d打印系统,其特征在于,所述决策模块包括运动行为决策单元和割草行为决策单元。7.根据权利要求6所述的草坪3d打印系统,其特征在于,所述运动行为决策单元,用于基于割草机器人不同位置确定不同的运动状态,其中,运
动状态包括:前进行驶、只前进、倒车行驶、只倒车、临时停车;对应控制模块运动控制单元;所述割草行为决策单元,用于基于所述带有图案信息的全局路径,进行割草行为决策,其中,割草行为决策包括:电机开闭、升降动作;对应控制模块割草控制单元。8.根据权利要求1所述的草坪3d打印系统,其特征在于,所述控制模块包括包括运动控制单元和割草控制单元。9.根据权利要求1所述的草坪3d打印系统,其特征在于,所述运动控制单元,用于基于动态避障dwa(dynamic window approach)与传统pid(proportion integration differentiation)混合的控制方案输出控制量,以提高轨迹跟踪控制精度的目的的同时满足避障需求;所述割草控制单元,用于在接收割草行为决策信息后,将路径点上图案信息转换为刀盘控制量,具体包括:将升降时间与刀盘高度对应,将图案点坐标与刀盘电机开闭对应。10.一种基于权利要求1-9之一所述草坪3d打印系统的打印方法,其特征在于,包括:s1神经网络搭建与预训练;s11基于resnet_50搭建草坪边界识别网络,用于草坪边界识别,通过图片分类公开数据集进行预训练;s12基于yolo_v5搭建割草机器人位置追踪网络,用于割草机器人位置追踪,通过车辆追踪所述图片分类公开数据集进行预训练;s13基于yolo_v5搭建障碍物检测网络,用于草坪障碍物检测,通过障碍物检测所述图片分类公开数据集进行预训练;s2所述图片分类数据集建立与模型训练s21找到符合设定训练特征的草场,并找到全面覆盖草坪、且草坪边界清晰无遮挡的位置,安装相机;s22在不同光照条件下拍摄所述草坪图片,并人工进行草坪边界标注,制作用于草坪边界识别的数据集;s23所述割草机器人在草坪边界内往复行驶、在草坪边界上行驶,拍摄图片保存,并人工进行标注草坪边界区域内是否有割草机器人,制作用于割草机器人检测的数据集;s24在草地上放置障碍物,拍摄图片并对所述障碍物进行人工标注,制作用于障碍物检测的数据集,其中,障碍物包括石头,枯木;s25将所述割草机器人检测的数据集和所述障碍物检测的数据集分别放入所述yolo_v5网络进行训练,具体包括:草坪边界识别的网络输入为所述草坪图片,输出为所述草坪边界坐标信息;割草机器人位置追踪的网络输入为含割草机器人的草坪图片,输出为割草机器人到达草坪边界位置信息,障碍物检测的网络输入为含障碍物的草场图片,输出为障碍物坐标信息;s26将所述草坪边界坐标信息、割草机器人到达草坪边界位置信息和所述障碍物坐标信息保存,并部署至路测计算单元;s3实际支架安装与相机标定s31根据实际草坪情况寻找合适位置安装支架,调节至合适高度,并将相机固定进行角度确定;s32进行照片拍摄输入网络判断识别精度,选择准确率最高的位置,完成安装后利用深
度相机拍摄标定图像,通过草坪实际尺寸与保存图片分辨率确定比例参数,并根据相机安装角度、高度进行坐标转换,消除畸变,为感知定位模块提供初始参数;s4草坪边界识别在路侧计算单元启动草坪边界识别程序,深度相机拍摄草坪图片,输入事先保存的神经网络中,输出草坪边界坐标信息,并传输至车端计算部分;完成传输后退出该程序;s5全局路径生成在车端计算部分启动图案输出程序,人为指定割草方向,根据草坪边界坐标信息,确定割草机器人起点以及终点,利用覆盖式规划算法在每个设定距离生成一个路径点,生成初始的全局路径,在初始的全局路径基础上进行坐标转化,并结合割草机器人的往复运动特性对轨迹进行优化;s6图案点匹配对于所述图案信息,图案输出模块根据输入图片的灰度值提取需割草区域点并确定割草高度,与s5中不带图案信息的全局路径结合,得到最终的全局路径文件,将路径文件以.log形式保存方便决策模块读取;完成传输后退出图案输出程序;s7定位与障碍物检测在所述路侧计算单元启动机器人定位程序与障碍物检测程序,通过所述深度相机与所述里程计输出割草机器人实时位置信息,通过深度相机输出检测障碍物坐标信息;s8草坪3d打印在车端计算部分启动决策程序与控制程序;其中决策模块根据机器人实时位置信息与路径点上图案信息,进行割草机器人的运动行为决策与割草行为决策;控制模块根据决策模块给定的运动状态、全局路径信息进行对应控制,进行草坪3d打印,同时控制模块接收障碍物坐标信息,实现动态避障;s9打印完成到达终点位置后,刀盘电机关闭,刀盘升降至合适位置,所述割草机器人停车,退出所述路侧计算单元对割草机器人定位与障碍物检测程序、车端计算部分决策程序与控制程序,完成草坪3d打印。
技术总结
本发明涉及智能割草机器人研究开发技术领域,提供了一种基于智能割草机器人的草坪3D打印系统和方法。该方法包括:找到符合设定训练特征的草坪,基于各种网络进行模型搭建与训练,启动边界识别程序,将输出的草坪边界坐标信息与图案信息共同传输至车端计算部分,输出全局路径,并结合割草机器人的往复运动特性进行轨迹优化,保存为.log文档的全局路径;启动机器人定位与障碍物检测程序,输出割草机器人实时位置信息与障碍物信息;并输出运动状态与割草状态,实现割草机器人往复运动与刀盘运动,进行3D打印;实现避障。本发明提高定位效果的同时降低成本,实现覆盖割草的同时能够进行3D打印,并提高了割草效率和控制精度。并提高了割草效率和控制精度。并提高了割草效率和控制精度。
技术研发人员:周彬 夏启 余贵珍 王章宇 韩知轩
受保护的技术使用者:北京航空航天大学
技术研发日:2022.04.13
技术公布日:2022/8/9
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。