1.本发明涉及柔性材料加工技术领域,尤其涉及一种柔性材料的无痕纠偏覆合装置、系统及纠偏方法。
技术背景
2.柔性材料,如海绵、乳胶棉、编织面料、橡胶等可用于加工成复合产品,如授权公告号为cn201185778y的中国专利文件所公布的一种多功能覆合垫,就由基底、海绵层和多个不同功能层复合而成,在覆合垫生产的过程中,需要将各层柔性材料逐层进行叠加,在叠加过程中尤其需要叠层的位置和角度正确。
3.然而,在实际的生产工程中,柔性材料由于自身制造工艺、自身的物理化学特性、环境温湿度影响、发泡内应力释放时间长度、外力的影响等因素,通常会出现数毫米到数十毫米的无规则变形,在叠加操作过程中需要纠偏。
4.为此,申请人在先申请的授权公告号为cn 110407010 b的中国发明专利公开了一种适用于弹性材料的搬运与纠偏系统及其方法,该发明通过扎刺单元(7)的针(73)对材料进行穿刺,以提取材料,并以此为基础对材料进行纠偏操作。
5.这种操作模式在纠偏过程中会在材料表面留有刺针痕迹,针刺痕迹在纠偏的拉扯作用下易形成较为明显的纠偏痕迹,该纠偏痕迹显著降低了复合材料产品的品质,还易带来不良的感观体验。
技术实现要素:
6.为解决上述技术问题,本技术发明人对在先申请的现有技术进行了改进的发明设计,目的之一是提供柔性材料的无痕纠偏覆合装置,目的之二是提供一种使用该装置的纠偏覆合系统,目的之三是提供具体的纠偏覆合方法。
7.三个发明目的在下方分别予以说明:首先,一种柔性材料的无痕纠偏覆合装置,包含有承载部,所述承载部用于提供承载各构件的基础;除此之外,还包含有:提取部,直接或间接的设置于所述承载部上,所述提取部采用穿刺的方式结合柔性材料;纠偏部,设置于所述承载部上、用于驱动并控制纠偏动作,所述纠偏部包含有驱动纠偏动作的纠偏动力源、规范纠偏动作轨迹的纠偏轨道、控制纠偏动作方向及幅度的纠偏控制单元以及执行纠偏动作的纠偏执行端;紧固部,设置于所述纠偏执行端上、用于与至少部分所述柔性材料相紧固以配合所述纠偏部的纠偏动作,所述紧固部采用压合的方式与柔性材料相结合。
8.在先申请的技术方案中,采用针刺的方式能够将材料结合起来并实现提升和转移的目的,针刺本身也仅仅是在材料上留下较为细小的针孔,仅仅用于提取并不在对材料本
身留下明显的痕迹,然而,若是在此基础上加上纠偏动作,则会大不一样,纠偏时的拉扯会扩大乃至撕裂上述针孔,形成较为明显的纠偏痕迹,影响产品品质。
9.鉴于此,发明人保留了原扎刺单元的材料提取功能,而用另外的压合式紧固结构来提供纠偏动作时柔性材料的紧固,取代原扎刺单元的紧固功能,压合式的紧固结构不构成对柔性材料的物理破坏,而是通过足够大的压合力产生摩擦力来紧固柔性材料,能够避免材料在纠偏过程中被破坏,提升产品品质,并带来更好的感官体验。
10.同时,为了增加构件的集成度,所述提取部也设置于所述纠偏执行端上。
11.柔性材料通常为接近矩形的形状,此时,所述纠偏执行端包含有作用于所述柔性材料较长边的长边执行端、作用于所述柔性材料较短边的短边执行端、以及作用于所述柔性材料两条边相交部分区域的角部执行端;其中,所述长边执行端和所述短边执行端为双向移动的执行端,只需执行线性的纠偏动作即可,而所述角部执行端由于处在角落的位置,既需要适应长边方向的纠偏动作,又需要适应短边方向的纠偏动作,因此通常设置为四向移动的执行端,能够通过前后移动和左右移动在一定范围的平面内执行纠偏动作。
12.优选的,所述提取部通过斜向插入的针穿刺所述柔性材料来实现柔性材料的提取动作。
13.然而,仅仅考虑将针斜向插入尚有不足之处,发明人通过研究-开始考虑在不增加针的数量的前提下进一步提升柔性材料提取的稳定性,其核心构思在于:将分散的穿刺位置集中化,尽量增加穿刺区域的针孔密度,而不是增加针的数量;鉴于上述构思,将运行轨迹平行设置、且相邻的若干根所述针构成一个穿刺针组,将所述提取部通过交错插入的两个穿刺针组穿刺所述柔性材料来实现柔性材料的提取动作,如此,针的穿刺部位便集中于两个穿刺针组的交错处,相对密集的穿刺位置使得柔性材料在提取过程中更加稳定;同时,交错设置的两个穿刺针组相互限制了柔性材料在其中任意一个穿刺针组上的位移,进一步增强了柔性材料在提取过程中的稳定性。
14.优选的,采用仿生思路设计,模拟人工手动紧固柔性材料的动作,所述紧固部包含有:模拟人手食指至小指四根指头并拢样子的摆动紧固件,摆动紧固件铰接于所述紧固部上,通过摆动到达压合所述柔性材料的位置;紧固动力源,用于驱动所述摆动紧固件的摆动动作;模拟人手食指至小指四根指头并拢后指尖部分的防滑部,设置于所述摆动紧固件压合所述柔性材料的一端,用于防止所述柔性材料被紧固后的滑脱。
15.更具体的,所述摆动紧固件由两侧的紧固摆臂和连接于两个所述紧固摆臂之间的紧固压条构成,所述防滑部形成于所述紧固压条压合于所述柔性材料的端面上。
16.在有些工况下,复合柔性材料产品的表面是起伏的而非一个平整的平面,发明人发现,在该工况下提取柔性材料时,起伏材料表面上的凸起部分会被提取部压制而变形,该部分材料内部存在恢复形变的内应力,而这些内应力会促使穿刺形成的针孔有扩大或撕裂的倾向,有时会造成穿刺痕迹的明显化,同样会对产品的品质带来不利影响,并且,采用之前的技术方案进行提起起伏材料时,不能够保证同一平面上的所有提起部与材料表面贴
合,提起材料时造成部分区域无法提起-提起失败的缺陷,若采用大压力压制材料,则容易出现柔性材料变形粘连等现象。
17.因此,发明人通过设计,在所述纠偏执行端上设置有顺应于所述柔性材料的起伏方向并可活动的滑动调节部,所述提取部通过所述滑动调节部设置于所述纠偏执行端上;所述滑动调节部包括有若干个滑动结构,每个滑动结构由套筒、滑动的设置在所述套筒内的滑杆构成,所述滑杆位于所述套筒内的端部、与所述套筒上滑杆输出的端部共同构成止抵/限位结构,所述止抵结构用于限制所述滑杆的滑动幅度;通过这样的设置,提取部在遇到起伏材料表面的凸起部分时,便会自动向上滑动,极大的减少了对该凸起部分的压制,进而避免了材料内部由于恢复形变产生内应力,使针孔不至于扩大/撕裂,提升了产品的品质。
18.另外,滑动调节部能够自适应的覆盖于起伏材料的表面,提升提取动作的稳定性和可靠性。
19.为了配合提取部提取后的柔性材料的位置,所述紧固部也通过所述滑动调节部设置于所述纠偏执行端上。
20.其次,一种柔性材料的无痕纠偏覆合系统,包含有上述任一技术方案所述的无痕纠偏覆合装置;还包含有:工作台,至少用于放置柔性材料和柔性基底;图像识别装置,用于拍摄所述柔性材料和所述柔性基底的图像;运动机器人,用于带动所述无痕纠偏覆合装置至提取所述柔性材料的位置、以及带动所述无痕纠偏覆合装置至将所述柔性材料覆盖于所述柔性基底上的位置;所述无痕纠偏覆合装置的纠偏控制单元与所述图像识别装置通讯连接,接收所述图像识别装置所收集到的图像信息,并基于所述图像信息产生控制指令,控制所述运动机器人的运动和对所述柔性材料的纠偏动作。
21.最后,一种柔性材料的无痕纠偏覆合方法,包含有如下步骤:s01、图像拍摄步骤:图像识别装置针对柔性材料和柔性基底拍摄图像画面且传送给纠偏控制单元;s02、计算步骤:所述纠偏控制单元基于所述拍摄图像的画面计算出柔性材料和柔性基底的调整数据,并基于所述调整数据产生运动控制数据;s03、覆合运动步骤:所述纠偏控制单元控制运动机器人带动无痕纠偏装置的提取部刺取所述柔性材料后的搬运移动,将所述柔性材料覆盖所述柔性基底进行覆合;s04、纠偏运动步骤:所述纠偏控制单元控制所述无痕纠偏覆合装置上的紧固部与至少部分所述柔性材料相紧固结合,撤销所述提取部与所述柔性材料的穿刺关系,然后对所述柔性材料进行外轮廓的调整纠偏。
22.综上所述,本发明所述的技术方案具有以下主要的有益效果:
①
本技术所述的纠偏覆合装置用压合式紧固结构来提供纠偏动作时柔性材料的紧固,取代原扎刺单元的紧固功能,能够避免材料在纠偏过程中被破坏,提升产品品质,并带来更好的感官体验;
②
采用滑动调节部使得提取部在遇到起伏材料表面的凸起部分时,自动向上滑
动,极大的减少了对该凸起部分的压制,进而避免了针孔的扩大/撕裂,同时还可以增强提取动作的稳定性和可靠性,以提升产品品质。
23.进一步地或者更细节的有益效果将在具体实施方式中结合具体实施例进行说明。
附图说明
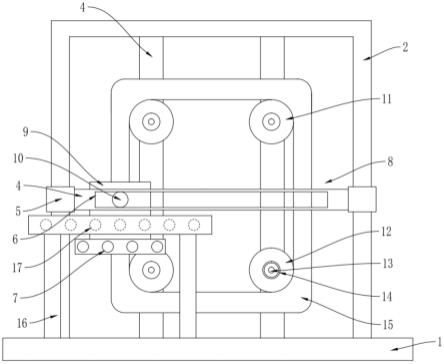
24.图1为无痕纠偏装置的俯视结构示意图;图2为图1的a区放大图;图3为图1的b区放大图;图4为图1的c区放大图;图5为无痕纠偏装置的侧向结构示意图,其提取的柔性材料具有起伏的非平整表面;图6为带有提取部、紧固部的纠偏部结构示意图;图7为带有提取部、紧固部的部分纠偏端的侧向结构示意图,其中包含了摆动紧固件压合/松开柔性材料的不同状态示意图;图8为带有提取部、紧固部的部分纠偏端的俯视结构示意图;图9为带有提取部、紧固部的部分纠偏端的立体结构示意图;图10为柔性材料的无痕纠偏系统的工作状态示意图;图11为未经纠偏的上下两层柔性材料的复合结构示意图,其结合部位存在明显的缝隙与瑕疵;图12为经过纠偏后的上下两层柔性材料的复合结构示意图,其结合部位结合紧密无瑕疵;图中,1-无痕纠偏覆合装置;1-1-承载部;1-2-提取部、1-21-针;1-3-纠偏部、1-31-纠偏动力源、1-32-纠偏轨道、1-33-纠偏控制单元、1-34-纠偏执行端、1-341-长边执行端、1-342-短边执行端、1-343-角部执行端、1-34b-滑动调节部、1-34b1-套筒、1-34b2-滑杆;1-4-紧固部、1-41-摆动紧固件、1-411-紧固摆臂、1-412-紧固压条、1-42-紧固动力源、1-43-防滑部;2-工作台、3-图像识别装置、4-运动机器人;a-柔性材料、b-柔性基底。
具体实施方式
25.本技术实施例的技术方案所面临的核心技术问题来源于现有技术中复合材料产品品质的不足之处,该不足主要体现在:显著的纠偏痕迹对复合产品的性能、品质的影响。
26.因此,避免上述缺陷的发生成了发明人亟需解决的技术问题。
27.下面结合实施例及附图对本发明进行进一步的解释,本技术涉及申请人的在先申请cn 110407010 b的中国发明专利技术方案的创新,在先申请中原本存在的部分结构、控制方法与本技术实施例的相应部分尽量不予以重复说明,以免赘叙;
同时,以下所述仅为本发明的部分实施例,并非对本发明的范围进行限定:作为本技术的实施例1:请参考附图中的图1-图7,一种柔性材料的无痕纠偏覆合装置,作为纠偏系统的纠偏功能部件而存在。
28.申请人在先申请cn 110407010 b的技术方案中,采用针刺的方式为基础进行纠偏操作,纠偏时的拉扯会扩大乃至撕裂针孔,形成较为明显的纠偏痕迹,影响产品品质,鉴于此,发明人保留原扎刺单元的材料提取功能,同时,增设另外的压合式紧固结构来提供纠偏动作时柔性材料的紧固,取代原扎刺单元的紧固功能;压合式的紧固结构不构成对柔性材料的物理破坏,而是通过足够大的压合力产生摩擦力来紧固柔性材料,能够避免材料在纠偏过程中被破坏,提升产品品质,保证产品性能,并带来更好的感官体验。
29.具体而言,本实施例所述的纠偏覆合装置包含有一承载部1-1,承载部1-1包含有闭合的环状框架、及该框架内交错设置的若干个杆状支撑件;框架的周边位置设置有若干个用于驱动并控制纠偏动作的纠偏部1-3,每个纠偏部1-3都包含有驱动纠偏动作的纠偏动力源1-31、规范纠偏动作轨迹的纠偏轨道1-32以及执行纠偏动作的纠偏执行端1-34,其中,若干个纠偏部1-3还共享有一个控制纠偏动作方向及幅度的纠偏控制单元1-33;纠偏执行端1-34上同时设置有提取部1-2和紧固部1-4;其中,提取部1-3通过交错插入的针1-21穿刺柔性材料a来实现柔性材料a的提取动作,关于提取部1-2和纠偏部1-3的详细结构可参考申请人的在先申请cn 110407010 b中的技术方案;而紧固部1-4包含有铰接设置的摆动紧固件1-41,摆动紧固件1-41通过紧固动力源1-42驱动生成摆动动作,并通过防滑部1-43压紧柔性材料a的边缘部分;具体的,本实施例中的紧固部采用仿生思路设计,模拟人工手动紧固柔性材料a的动作,摆动紧固件1-41由两侧的紧固摆臂1-411和连接于两个紧固摆臂1-411之间的紧固压条1-412构成,紧固摆臂1-411设置成曲臂以模拟人手食指至小指四根指头并拢并弯曲的样子,防滑部1-43形成于紧固压条1-412压合于柔性材料a的端面上,以模拟人手食指至小指四根指头并拢后的指尖部分,为了强化压合的牢固度,防滑部1-43通常以锥尖结构与柔性面料a相压合;其中,摆动紧固件1-41的驱动形式不限于摆动、四杆运动等结构来进行。
30.请参考图10,采用本实施例所述的无痕纠偏覆合装置1的纠偏覆合系统,还包含有:工作台2,分为两部分,分别用于放置柔性材料a和柔性基底b;图像识别装置3,用于拍摄柔性材料a和柔性基底b的图像;运动机器人4,用于带动无痕纠偏覆合装置1至提取所述柔性材料a的位置,将柔性材料a提取起来;运动机器人4还用于带动无痕纠偏覆合装置1至将柔性材料a覆盖于柔性基底b上的位置;其中,无痕纠偏覆合装置1的纠偏控制单元1-33与图像识别装置3通讯连接,接收图像识别装置3所收集到的图像信息,并基于图像信息产生控制指令,控制运动机器人4的运动和对柔性材料a的纠偏动作。
31.本实施例所述的无痕纠偏系统的纠偏覆合方法,包含有如下步骤:s01、图像拍摄步骤:图像识别装置3针对柔性材料a和柔性基底b拍摄图像画面且传送给纠偏控制单元1-33;s02、计算步骤:纠偏控制单元1-33基于拍摄图像的画面计算出柔性材料a和柔性基底b的调整数据,并基于调整数据产生运动控制数据;s03、覆合运动步骤:纠偏控制单元1-33控制运动机器人4带动无痕纠偏装置1的提取部1-2刺取柔性材料a后的搬运移动,将柔性材料a覆盖柔性基底b进行覆合;s04、纠偏运动步骤:纠偏控制单元1-33控制无痕纠偏覆合装置1上的紧固部1-4与至少部分柔性材料a相紧固结合,撤销提取部1-2与柔性材料a的穿刺关系,然后对柔性材料a进行外轮廓的调整纠偏。
32.作为本技术的实施例2:请参考附图中的图1至图4,对于接近矩形的柔性材料a而言,本实施例所述的无痕纠偏覆合装置1在实施例1技术方案的基础上,将承载部1-1设置成大致的矩形,并通过设置使得纠偏执行端1-34包含有作用于柔性材料a较长边的长边执行端1-341、作用于柔性材料a较短边的短边执行端1-342、以及作用于柔性材料a两条边相交部分区域的角部执行端1-343;具体的,长边执行端1-341和短边执行端1-342均为双向移动的执行端,只需执行线性的纠偏动作即可,双向移动的工作原理可参考申请人的在先申请cn 110407010 b中的技术方案中的双向纠偏器的相关内容;而角部执行端1-343由于处在角落的位置,既需要适应长边方向的纠偏动作,又需要适应短边方向的纠偏动作,因此设置为四向移动的执行端,能够通过前后移动和左右移动在一定范围的平面内执行纠偏动作,四向移动的工作原理可参考申请人的在先申请cn 110407010 b中的技术方案中的四向纠偏器的相关内容。
33.相应的纠偏覆合系统为包含有本实施例纠偏装置的系统。
34.相应的纠偏覆合方法参考实施例1。
35.作为本技术的实施例3:请参考附图中的图5至图7,对于存在起伏表面的柔性材料而言,发明人发现,若采用刚性的提取结构,则材料拆垛时无法可靠抓取,并且起伏材料表面上的凸起部分会被提取部1-2压制而变形,进而生成恢复材料形变的内应力-促使穿刺形成的针孔扩大或撕裂,造成穿刺痕迹的明显化,同样会对产品的品质带来不利影响,因此,发明人通过设计构思,在纠偏执行端1-34和提取部1-2之间设置悬挂浮动的滑动调节部1-34b以期改善上述问题。
36.具体而言,本实施例所述的无痕纠偏覆合装置1在实施例1技术方案的基础上增设了滑动调节部1-34b;滑动调节部1-34b采用了浮动悬挂的设计思路,设置于纠偏执行端1-34上,可自动适应的在柔性材料a的起伏方向浮(滑)动,而提取部1-2则设置于滑动调节部1-34b与柔性面料a之间;具体的,滑动调节部1-34b包括有若干个滑动结构,每个滑动结构由套筒1-34b1、滑动的设置在套筒1-34b1内的滑杆1-34b2构成,并且,滑杆1-34b2位于所述套筒1-34b1内的端部、与套筒1-34b1上滑杆1-34b2输出的端部共同构成止抵结构,该止抵结构用于限制
滑杆1-34b2的滑动幅度;滑动调节部1-34b上还可以设置有浮动悬挂传感器,所有的滑动调节部1-34b都与柔性材料a的起伏表面接触后,触发浮动悬挂传感器,此时,纠偏控制单元1-33给提取部1-2的刺针组件发出穿刺指令,完成材料的提取动作;同时,为了配合提取部1-2提取后的柔性材料a的位置,紧固部1-4也通过滑动调节部1-34b设置于纠偏执行端1-34上。
37.相应的纠偏覆合系统为包含有本实施例纠偏装置的系统。
38.相应的纠偏覆合方法参考实施例1。
39.作为本技术的实施例4:请参考附图中的图7至图9,以实施例1的技术方案作为基础,发明人认识到:仅仅考虑将针1-21斜向插入尚有不足之处,该不足之处体现在提取过程中的柔性材料a不够稳定,相对容易发生位移,进而影响后续材料覆合的品质;鉴于此,发明人开始考虑如何在不增加针的数量的前提下、进一步提升柔性材料a提取的稳定性,解决方案的核心构思在于:将分散的穿刺位置集中化,尽量增加穿刺区域的针孔密度,而不是增加针的数量;鉴于上述构思,设置运行轨迹平行设置、且相邻的若干根针1-21构成一个穿刺针组,且将提取部1-2通过交错插入的两个穿刺针组穿刺柔性材料a来实现提取动作,如此,针1-21的穿刺部位便集中于两个穿刺针组的交错处,相对密集的穿刺位置使得柔性材料a在提取过程中更加稳定;同时,交错设置的两个穿刺针组相互限制了柔性材料a在其中任意一个穿刺针组上的位移,进一步增强了柔性材料a在提取过程中的稳定性。
40.具体而言,本实施例所述的无痕纠偏覆合装置1在实施例1技术方案的基础上,在提取部1-2的面板上限定相邻的两个穿刺针组的穿刺轨迹相互交错,并通过纠偏控制单元1-33驱动气缸控制穿刺针组中针1-21的穿刺和收回动作。
41.相应的纠偏覆合系统为包含有本实施例纠偏装置的系统。
42.相应的纠偏覆合方法参考实施例1。
43.本技术实施例所提及的驱动方式包含但不限于电动、气动、电磁等常见驱动形式,导向方式不限于导轨、直线轴等常见导向方式,传感器的反馈方式不限于对射、感应、微动开关等常见的反馈方式。
44.在本说明书的描述中,参考术语“实施例”、“基础实施例”、“优选实施例”、“其他实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
45.尽管已描述了本发明的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本发明范围的所有变更和修改。
46.显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围
之内,则本发明也意图包含这些改动和变型在内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。