1.本发明涉及医疗器械技术领域,特别涉及一种髋关节置换术用侧卧位托手架。
背景技术:
2.髋关节置换又称作人工髋关节置换,是将人工假体,包含股骨部分和髋臼部分,利用骨水泥和螺丝钉固定在正常的骨质上,以取代病变的关节,重建患者髋关节的正常功能,是一种较成熟可靠的治疗手段,在进行手术时,需要患者侧卧以对其腰部侧面进行手术,现有装置在对患者侧卧时的手臂进行固定时,不便于对不同身高患者手臂在手术台上方前后距离进行适配,现有托手架不便于对患者手臂水平高度进行适配,现有托手架不便于患者大臂和小臂弯曲度进行适配,现有托手架不便于对患者双臂长度进行适配,现有托手架不便于对双臂垂直与水平距离进行调节,现有装置不便于转动至手术台底部内侧,不便于对装置进行便捷收纳。
3.现需一种髋关节置换术用侧卧位托手架,以便于对不同患者双臂位置进行适配固定。
4.于是,有鉴于此,针对现有结构及缺陷予以进行研究改良,提供一种髋关节置换术用侧卧位托手架,以期达到更加具有实用性的目的。
技术实现要素:
5.有鉴于此,本发明提供一种髋关节置换术用侧卧位托手架,通过螺纹杆b带动铰接座进行垂直平移,可以对手臂托板垂直高度进行便捷调节,使用完毕后,可以通过反向转动手轮b带动铰接座及手臂托板向下平移,可以使手臂托板顶面降低至床体底面下方,使用者通过转动手轮a调整滑轨水平角度,可以使滑轨以及手臂托板水平转动至床体底部内侧,可以对装置进行便捷收纳。
6.本发明提供了一种髋关节置换术用侧卧位托手架,具体包括:床体;所述床体底端立面处固定连接有固定底盘;所述固定底盘底端通过转动连接设置有转盘;所述转盘顶部通过同轴连接设置有锥齿盘a,锥齿盘a顶部与固定底盘底部转动连接;所述固定底盘侧端固定连接有底架;所述底架底部通过转动连接设置有传动轴,传动轴左端通过同轴连接设置有锥齿轮a,锥齿轮a与锥齿盘a相啮合;所述转盘侧面固定连接有滑轨;所述滑轨右侧通过滑动连接设置有滑座;所述滑座内侧通过螺纹联接设置有螺纹杆b,螺纹杆b顶部通过转动连接设置有铰接座,螺纹杆a底端通过同轴连接设置有手轮b;所述铰接座右侧通过转动连接设置有手臂托板a。
7.可选地,所述传动轴右端通过同轴连接设置有蜗轮a,底架右侧底端通过转动连接设置有蜗杆a,蜗杆a与蜗轮a相啮合,蜗杆a右端通过同轴连接设置有手轮a。
8.可选地,所述滑座内部左右两侧垂直贯穿有圆形通孔,滑座左侧内部通过螺纹联接设置有螺纹杆a,螺纹杆a前端通过转动连接设置有橡胶片,螺纹杆a后端通过同轴连接设置有摇杆。
9.可选地,所述铰接座底部固定连接有滑杆,滑杆数量设置为二组,滑杆滑动连接于滑座内侧。
10.可选地,所述铰接座内侧通过转动连接设置有传动杆,传动杆左端通过同轴连接设置有锥齿轮b,传动杆右端通过同轴连接设置有蜗轮b。
11.可选地,所述铰接座内侧通过转动连接设置有蜗杆b,蜗杆b与蜗轮b相啮合,蜗杆b后端通过同轴连接设置有手轮c。
12.可选地,所述手臂托板a底部通过同轴连接设置有锥齿盘b,锥齿盘b与锥齿轮b相啮合。
13.可选地,所述手臂托板a右端开设有圆形通孔,手臂托板a右侧通过滑动连接设置有延伸座,延伸座左端固定连接有套杆,套杆滑动连接于手臂托板a圆形通孔内侧。
14.可选地,所述手臂托板a顶部左右两侧连接设置有魔术贴,手臂托板a右端底部固定连接有下凹板,下凹板与手臂托板a左右两侧通过转动连接设置有铰接套管。
15.可选地,所述下凹板顶部通过转动连接设置有螺杆,螺杆外侧通过螺纹联接设置有电动推杆,螺杆右侧通过同轴连接设置有蜗轮c,下凹板右端通过转动连接设置有蜗杆c,蜗杆c右端通过同轴连接设置有手轮d,电动推杆和铰接套管伸缩部顶部通过转动连接设置有手臂托板b。
16.有益效果根据本发明的各实施例的托手架与传统托手架相比,通过螺钉将固定底盘安装固定在手术台床体底部后,将患者安置在床体顶部后,使患者侧卧后,患者侧卧后,当需要对患者手臂放置左右方向进行匹配时,使用者可以通过转动手轮a,可以使与手轮a同轴的蜗杆a带动蜗轮a进行转动,可以使蜗轮a带动与其同轴的传动轴进行转动,可以使传动轴同轴的锥齿轮a带动锥齿盘a进行转动,可以使与锥齿盘a同轴的转盘进行转动,可以使转盘带动滑轨与固定底盘为圆心在床体下方进行水平方向转动,可以使滑轨侧端的手臂托板在床体外侧进行水平方向转动,可以在患者侧卧方位进行快速适配。
17.此外,通过设置滑座,将滑轨转动至手术台床体侧面后,使用者通过拖动前后手臂托板,可以使其带动滑座进行前后滑动,通过握住摇杆转动,可以使其带动螺纹杆a进行转动,可以使螺纹杆a带动橡胶片挤压滑轨表面,可以使其对滑座位置进行固定,可以对手臂托板在手术台边缘进行前后移动后固定位置,便于对不同身高患者手臂前后位置进行适配。
18.此外,通过设置螺纹杆b,使用者通过转动手轮b,可以使其带动螺纹杆b进行转动,可以使螺纹杆b带动铰接座进行垂直平移,可以对手臂托板垂直高度进行便捷调节,使用完毕后,可以通过反向转动手轮b带动铰接座及手臂托板向下平移,可以使手臂托板顶面降低至床体底面下方,使用者通过转动手轮a调整滑轨水平角度,可以使滑轨以及手臂托板水平转动至床体底部内侧,可以对装置进行便捷收纳,在侧卧位手术时,便于快速取出调整。
19.此外,通过设置锥齿盘b,使用者通过转动手轮c,通过蜗轮蜗杆传动可以使其带动锥齿轮b进行转动,可以使锥齿轮b带动锥齿盘b进行转动,可以对铰接座和手臂托板a水平角度进行调节,便于对患者大臂和小臂弯曲角度进行适配。
20.此外,通过设置电动推杆,将手臂托板水平角度调整后,通过转动手轮d,可以使手轮d带动与其同轴的蜗杆c进行转动,可以使蜗杆c带动蜗轮c进行转动,可以使蜗轮c带动与
其同轴的螺杆进行转动,可以使螺杆带动与其螺纹联接的电动推杆底部进行前后平移,通过拨动电动推杆调整角度后,通过控制电动推杆运转使其伸缩部推动手臂托板b进行垂直高度调整后,通过反向转动手轮d,通过联动可以使螺杆带动电动推杆c底端向后移动,可以使电动推杆c底端与螺杆和下凹板连接部分进行挤压夹持,可以对电动推杆垂直角度进行固定,将使用者手臂放置在手臂托板a和手臂托板b顶部后,通过向外侧拉动延伸座,可以对使用者双臂长度进行适配,可以对双臂垂直与水平距离进行调节,通过魔术贴绑缚,可以对患者手臂进行牢固定位,可以防止手臂滑落。
附图说明
21.为了更清楚地说明本发明的实施例的技术方案,下面将对实施例的附图作简单地介绍。
22.下面描述中的附图仅仅涉及本发明的一些实施例,而非对本发明的限制。
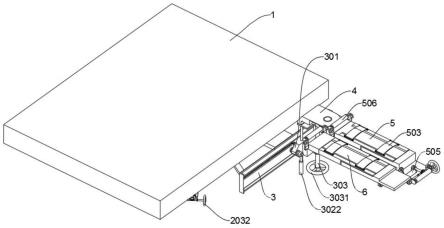
23.在附图中:图1示出了根据本发明的实施例的托手架整体的俯视立体结构的示意图;图2示出了根据本发明的实施例的托手架手臂托板a的前侧立体结构的示意图;图3示出了根据本发明的实施例图2中a的局部放大的示意图;图4示出了根据本发明的实施例图2中b的局部放大的示意图;图5示出了根据本发明的实施例的托手架手臂托板a的仰视立体结构的示意图;图6示出了根据本发明的实施例图5中c的局部放大的示意图;图7示出了根据本发明的实施例的托手架的滑轨的俯视立体结构的示意图;图8示出了根据本发明的实施例图7中d的局部放大的示意图。
24.附图标记列表1、床体;2、固定底盘;201、转盘;2011、锥齿盘a;202、传动轴;2021、锥齿轮a;2022、蜗轮a;203、底架;2031、蜗杆a;2032、手轮a;3、滑轨;301、滑座;302、螺纹杆a;3021、橡胶片;3022、摇杆;303、螺纹杆b;3031、手轮b;4、铰接座;401、传动杆;4011、锥齿轮b;4012、蜗轮b;402、蜗杆b;4021、手轮c;403、滑杆;5、手臂托板a;501、锥齿盘b;502、延伸座;5021、套杆;503、魔术贴;504、下凹板;505、电动推杆;5051、蜗轮c;5052、蜗杆c;5053、手轮d;506、铰接套管;6、手臂托板b。
具体实施方式
25.为了使得本发明的技术方案的目的、方案和优点更加清楚,下文中将结合本发明的具体实施例的附图,对本发明实施例的技术方案进行清楚、完整的描述。除非另有说明,否则本文所使用的术语具有本领域通常的含义。附图中相同的附图标记代表相同的部件。
26.实施例一:请参考图1至图8:本发明提出了一种髋关节置换术用侧卧位托手架,包括:床体1;床体1底端立面处固定连接有固定底盘2;固定底盘2底端通过转动连接设置有转盘201;转盘201顶部通过同轴连接设置有锥齿盘a2011,锥齿盘a2011顶部与固定底盘2底部转动连接;固定底盘2侧端固定连接有底架203;底架203底部通过转动连接设置有传动轴202,传动轴202左端通过同轴连接设置有锥齿轮a2021,锥齿轮a2021与锥齿盘a2011相啮合;转盘201侧面固定连接有滑轨3;滑轨3右侧通过滑动连接设置有滑座301;滑座301内侧通过螺纹联接设置有螺纹杆a302,螺纹杆b303顶部通过转动连接设置有铰接座4,螺纹杆b303底端通过同轴连接设置有手轮b3031;铰接座4右侧通过转动连接设置有手臂托板a5,传动轴202右端通过同轴连接设置有蜗轮a2022,底架203右侧底端通过转动连接设置有蜗杆a2031,蜗杆a2031与蜗轮a2022相啮合,蜗杆a2031右端通过同轴连接设置有手轮a2032,通过螺钉将固定底盘2安装固定在手术台床体1底部后,将患者安置在床体1顶部后,使患者侧卧后,患者侧卧后,当需要对患者手臂放置左右方向进行匹配时,使用者可以通过转动手轮a2032,可以使与手轮a2032同轴的蜗杆a2031带动蜗轮a2022进行转动,可以使蜗轮a2022带动与其同轴的传动轴202进行转动,可以使传动轴202同轴的锥齿轮a2021带动锥齿盘a2011进行转动,可以使与锥齿盘a2011同轴的转盘201进行转动,可以使转盘201带动滑轨3与固定底盘2为圆心在床体1下方进行水平方向转动,可以使滑轨3侧端的手臂托板在床体1外侧进行水平方向转动,可以在患者侧卧方位进行快速适配。
27.如图5至图7所示,滑座301内部左右两侧垂直贯穿有圆形通孔,滑座301左侧内部通过螺纹联接设置有螺纹杆a302,螺纹杆a302前端通过转动连接设置有橡胶片3021,螺纹杆a302后端通过同轴连接设置有摇杆3022,将滑轨3转动至手术台床体1侧面后,使用者通过拖动前后手臂托板,可以使其带动滑座301进行前后滑动,通过握住摇杆3022转动,可以使其带动螺纹杆a302进行转动,可以使螺纹杆a302带动橡胶片3021挤压滑轨3表面,可以使其对滑座301位置进行固定,可以对手臂托板在手术台边缘进行前后移动后固定位置,便于对不同身高患者手臂前后位置进行适配;使用者通过转动手轮b3031,可以使其带动螺纹杆b303进行转动,可以使螺纹杆b303带动铰接座4进行垂直平移,可以对手臂托板垂直高度进行便捷调节,使用完毕后,可以通过反向转动手轮b3031带动铰接座4及手臂托板向下平移,可以使手臂托板顶面降低至床体1底面下方,使用者通过转动手轮a2032调整滑轨3水平角度,可以使滑轨3以及手臂托板水平转动至床体1底部内侧,可以对装置进行便捷收纳,在侧卧位手术时,便于快速取出调整。
28.如图2至图8所示,铰接座4底部固定连接有滑杆403,滑杆403数量设置为二组,滑杆403滑动连接于滑座301内侧,铰接座4内侧通过转动连接设置有传动杆401,传动杆401左端通过同轴连接设置有锥齿轮b4011,传动杆401右端通过同轴连接设置有蜗轮b4012,铰接座4内侧通过转动连接设置有蜗杆b402,蜗杆b402与蜗轮b4012相啮合,蜗杆b402后端通过同轴连接设置有手轮c4021,手臂托板a5底部通过同轴连接设置有锥齿盘b501,锥齿盘b501与锥齿轮b4011相啮合,使用者通过转动手轮c4021,通过蜗轮蜗杆传动可以使其带动锥齿轮b4011进行转动,可以使锥齿轮b4011带动锥齿盘b501进行转动,可以对铰接座4和手臂托板a5水平角度进行调节,便于对患者大臂和小臂弯曲角度进行适配。
29.如图3至图8所示,手臂托板a5右端开设有圆形通孔,手臂托板a5右侧通过滑动连
接设置有延伸座502,延伸座502左端固定连接有套杆5021,套杆5021滑动连接于手臂托板a5圆形通孔内侧,手臂托板a5顶部左右两侧连接设置有魔术贴503,手臂托板a5右端底部固定连接有下凹板504,下凹板504与手臂托板a5左右两侧通过转动连接设置有铰接套管506,下凹板504顶部通过转动连接设置有螺杆,螺杆外侧通过螺纹联接设置有电动推杆505,螺杆右侧通过同轴连接设置有蜗轮c5051,下凹板504右端通过转动连接设置有蜗杆c5052,蜗杆c5052右端通过同轴连接设置有手轮d5053,电动推杆505和铰接套管506伸缩部顶部通过转动连接设置有手臂托板b6,将手臂托板水平角度调整后,通过转动手轮d5053,可以使手轮d5053带动与其同轴的蜗杆c5052进行转动,可以使蜗杆c5052带动蜗轮c5051进行转动,可以使蜗轮c5051带动与其同轴的螺杆进行转动,可以使螺杆带动与其螺纹联接的电动推杆505底部进行前后平移,通过拨动电动推杆505调整角度后,通过控制电动推杆505运转使其伸缩部推动手臂托板b6进行垂直高度调整后,通过反向转动手轮d5053,通过联动可以使螺杆带动电动推杆c505底端向后移动,可以使电动推杆c505底端与螺杆和下凹板504连接部分进行挤压夹持,可以对电动推杆505垂直角度进行固定,将使用者手臂放置在手臂托板a5和手臂托板b6顶部后,通过向外侧拉动延伸座502,可以对使用者双臂长度进行适配,通过魔术贴503绑缚,可以对患者手臂进行牢固定位,可以防止手臂滑落。
30.本实施例的具体使用方式与作用:本发明中,在使用时,通过螺钉将固定底盘2安装固定在手术台床体1底部后,将患者安置在床体1顶部后,使患者侧卧后,患者侧卧后,当需要对患者手臂放置左右方向进行匹配时,使用者可以通过转动手轮a2032,可以使与手轮a2032同轴的蜗杆a2031带动蜗轮a2022进行转动,可以使蜗轮a2022带动与其同轴的传动轴202进行转动,可以使传动轴202同轴的锥齿轮a2021带动锥齿盘a2011进行转动,可以使与锥齿盘a2011同轴的转盘201进行转动,可以使转盘201带动滑轨3与固定底盘2为圆心在床体1下方进行水平方向转动,可以使滑轨3侧端的手臂托板在床体1外侧进行水平方向转动,可以在患者侧卧方位进行快速适配,将滑轨3转动至手术台床体1侧面后,使用者通过拖动前后手臂托板,可以使其带动滑座301进行前后滑动,通过握住摇杆3022转动,可以使其带动螺纹杆a302进行转动,可以使螺纹杆a302带动橡胶片3021挤压滑轨3表面,可以使其对滑座301位置进行固定,可以对手臂托板在手术台边缘进行前后移动后固定位置,便于对不同身高患者手臂前后位置进行适配;使用者通过转动手轮b3031,可以使其带动螺纹杆b303进行转动,可以使螺纹杆b303带动铰接座4进行垂直平移,可以对手臂托板垂直高度进行便捷调节,使用完毕后,可以通过反向转动手轮b3031带动铰接座4及手臂托板向下平移,可以使手臂托板顶面降低至床体1底面下方,使用者通过转动手轮a2032调整滑轨3水平角度,可以使滑轨3以及手臂托板水平转动至床体1底部内侧,可以对装置进行便捷收纳,在侧卧位手术时,便于快速取出调整,使用者通过转动手轮c4021,通过蜗轮蜗杆传动可以使其带动锥齿轮b4011进行转动,可以使锥齿轮b4011带动锥齿盘b501进行转动,可以对铰接座4和手臂托板a5水平角度进行调节,便于对患者大臂和小臂弯曲角度进行适配,将手臂托板水平角度调整后,通过转动手轮d5053,可以使手轮d5053带动与其同轴的蜗杆c5052进行转动,可以使蜗杆c5052带动蜗轮c5051进行转动,可以使蜗轮c5051带动与其同轴的螺杆进行转动,可以使螺杆带动与其螺纹联接的电动推杆505底部进行前后平移,通过拨动电动推杆505调整角度后,通过控制电动推杆505运转使其伸缩部推动手臂托板b6进行垂直高度调整后,通过反向转动手轮d5053,通过联动可以使螺杆带动电动推杆c505底端向后移动,可以使电动
推杆c505底端与螺杆和下凹板504连接部分进行挤压夹持,可以对电动推杆505垂直角度进行固定,将使用者手臂放置在手臂托板a5和手臂托板b6顶部后,通过向外侧拉动延伸座502,可以对使用者双臂长度进行适配,通过魔术贴503绑缚,可以对患者手臂进行牢固定位,可以防止手臂滑落。
31.最后,需要说明的是,本发明在描述各个构件的位置及其之间的配合关系等时,通常会以一个/一对构件举例而言,然而本领域技术人员应该理解的是,这样的位置、配合关系等,同样适用于其他构件/其他成对的构件。以上所述仅是本发明的示范性实施方式,而非用于限制本发明的保护范围,本发明的保护范围由所附的权利要求确定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。