1.本发明涉及一种多层级地图的端到端智能生成方法及系统,属于计算机视觉技术领域。
背景技术:
2.传统网络地图中的各层地图图像,通常要根据地图矢量数据,按照一定绘图标准渲染而成。但是,地图矢量数据的获取通常需要人工现场采集,在效率与成本方面均存在较大的局限性。考虑到遥感影像的获取速度快、收集成本低的特点,根据遥感影像自动生成网络地图,成为了一种可行的解决方案。但是,现有方法并没有全面分析多层级网络地图生成的难点,多层级地图不同层级存在相同的地理要素、多层级地图不同层级地理要素显示详略不同,以及遥感像素空间和地图像素空间存在较大差异,导致难以生成信息表达准确一致、且具有较好视觉效果的多层级网络地图。
3.多层级网络地图通常采用瓦片地图金字塔模型结构。从瓦片金字塔的最高层(第k层)到最低层(第0层),分辨率越来越低,但表示的地理区域范围不变。具体而言,第k层瓦片地图的距离像素比是第k-1层的一半,因此具有更大的空间分辨率,能够显示更精细的内容。在多层级网络地图中,不同层级地图所包含的地理要素保持一致,而展示的详略程度有所差别,因此,多层级网络地图存在层级间的一致性与差异性。
4.遥感影像是利用无人机、飞机和卫星等高空设备对地拍摄得到的图像。相对于地图矢量数据而言,其具有更新速度快,收集成本相对较低的特点。但是,由于遥感影像从实际环境中采集,相比于经过人为美化的地图有着较为明显的差别,这使得从遥感影像生成地图成为一项有挑战的工作。
技术实现要素:
5.本发明的目的是设计一个有效的深度神经网络,用于实现遥感像素空间到地图像素空间的转换,并利用多层级地图具备多个同一地理范围的特点,使生成的多层级地图具备层级一致性和差异性,并创造性地提出一种多层级地图的端到端智能生成方法及系统。本发明实现从遥感影像生成多层级网络地图,无需人工制图,减少了人力成本,加快了地图生成速度。
6.一种多层级地图的端到端智能生成方法,包括以下步骤:
7.步骤1:根据深度神经网络,设计从遥感影像生成多层级地图的多层级地图生成网络。
8.所述多层级地图生成网络为端到端网络,用于从遥感图像中生成多层级地图图像。
9.具体地,多层级地图生成网络包括:
10.层级分类器,用于判断渲染生成器生成的初步地图所属的层级。层级分类器包括批归一化层和卷积层。
11.地图要素提取器,用于将从所述的遥感图像中提取地理要素特征。地图要素提取器包含基于全卷积的语义分割网络,基于transformer的语义分割网络,以及基于编码器解码器结构的语义分割网络。
12.渲染生成器,用于根据所述的地理要素特征,遥感影像和层级标识生成初步地图。渲染生成器包括基于条件对抗生成网络的生成器,以及基于循环一致性的对抗生成网络的生成器。
13.多层融合生成器,用于根据所述的多层初步地图生成精修地图。多层融合生成器包括批归一化层、调整大小层、基于条件对抗生成网络的生成器,以及基于循环一致性的对抗生成网络的生成器。
14.判别器,用于判断所述的初步地图和精修地图是否为真。判别器包括基于条件对抗生成网络的判别器,以及基于循环一致性的对抗生成网络的判别器。
15.步骤2:建立多层级网络地图生成数据集。
16.其中,数据集中的每一类数据包括遥感影像、地图图像、地理要素标签和层级标识。
17.所述遥感影像根据最高层级地图分辨率进行采样,并根据层级数进行2倍下采样,得到多层遥感影像,即第k层遥感影像分辨率是第k 1层的二分之一。
18.步骤3:使用数据集对生成网络进行训练,得到优化的生成网络模型参数。
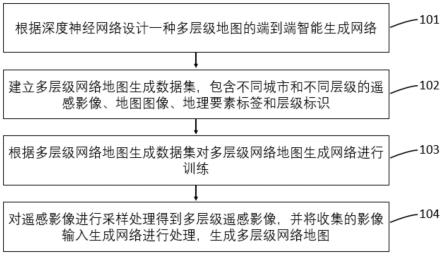
19.步骤4:对遥感影像进行采样处理,得到多层级遥感影像,并将收集的影像输入生成网络进行处理,生成多层级网络地图。
20.所述采样方法,包括双线性插值、双三次插值和中值插值。
21.一种多层级地图的端到端智能生成系统,包括训练模块和生成模块。
22.其中,训练模块用于建立多层级网络地图生成数据集,根据多层级网络地图生成数据集对多层级地图生成网络进行训练。
23.生成模块,用于将多层级遥感影像输入预先训练的多层级地图生成网络进行处理,生成多层级网络地图。
24.有益效果
25.本发明,对比现有技术,具有以下优点:
26.本发明通过多层级网络地图生成网络从遥感影像中生成多层级网络地图,能够实现无需人工参与的多层级网络地图生成,生成速度快且花费低。
附图说明
27.图1为本发明方法的流程示意图;
28.图2为一种多层级地图的端到端智能生成网络训练示意图;
29.图3为一种多层级地图的端到端智能生成网络测试示意图;
30.图4为本发明系统的结构示意图。
具体实施方式
31.下面结合附图对本发明和实施例做进一步详细说明。
32.实施例
33.一种多层级地图的端到端智能生成方法,如图1所示,包括以下步骤:
34.步骤101:根据深度神经网络,设计一种多层级地图的端到端智能生成网络。
35.该深度神经网络为端到端网络。根据多层级网络地图生成数据集对深度神经网络进行训练,得到优化的多层级网络地图生成模型参数。
36.步骤102:建立多层级网络地图生成数据集,包含不同城市和不同层级的遥感影像、地图图像、地理要素标签和层级标识。
37.其中,多层级网络地图生成数据集中的每一数据包括遥感影像、地图图像、地理要素标签和层级标识。以北京第18层级地图数据为例,遥感影像为对地拍摄的包含地面信息的图片,地图为专家根据矢量数据人工绘制的图片,地理要素标签由地图通过kmeans聚类得到,层级表示为对应的层级号18。
38.通过收集遥感影像,地图配对数据,对地图进行kmeans聚类,得到地理要素标签,记录所属层级作为标识,由此形成数据集。
39.步骤103:根据多层级网络地图生成数据集,对多层级网络地图生成网络进行训练。
40.在本实施例中,多层级地图生成网络包括:层级分类器、地图要素提取器、渲染生成器、多层融合生成器和判别器。
41.其中,层级分类器用于判断渲染生成器生成的初步地图所属的层级。层级分类器包括批归一化层(bn)、卷积层(conv)。
42.地图要素提取器用于从遥感图像中提取地理要素特征。地图要素提取器包含基于全卷积的语义分割网络(fcn,deeplabv3 等),基于transformer的语义分割网络(swin transformer,segformer,segmenter等),以及基于编码器解码器结构的语义分割网络(unet,pspnet等)。
43.渲染生成器用于根据地理要素特征、遥感影像和层级标识生成初步地图。渲染生成器包括基于条件对抗生成网络的生成器(pixe2pix,pix2pixhd,tsit,selectiongan等),以及基于循环一致性的对抗生成网络的生成器(cyclegan,smapgan等)。
44.多层融合生成器用于根据多层初步地图生成精修地图。多层融合生成器包括批归一化层(bn),调整大小层(resize)、基于条件对抗生成网络的生成器(pixe2pix,pix2pixhd,tsit,selectiongan等),以及基于循环一致性的对抗生成网络的生成器(cyclegan,smapgan等)。
45.判别器用于判断初步地图和精修地图是否为真。判别器包括基于条件对抗生成网络的判别器(pixe2pix,pix2pixhd,tsit,selectiongan等)、基于循环一致性的对抗生成网络的判别器(cyclegan,smapgan等)。
46.在本实施例中,遥感影像根据最高层级地图分辨率进行采样,并根据层级数进行多次二倍下采样得到所述的多层遥感影像。其中每一层遥感影像分辨率是高一层的二分之一。采样方式可以是双线性插值、双三次插值或中值插值。
47.基于上述步骤,利用得到的多层遥感影像,生成多层级网络地图
48.进一步地,如图2所示,对训练过程进行详细说明。
49.本实施例中,对多层级网络地图生成网络进行端到端训练,包括以下步骤:
50.具体地,首先,将第k层遥感影像和第k-1层遥感影像,分别送入地图要素提取器,
1层初步地图输入到多层融合生成器中,完成第k层精修地图的生成。
68.为了实现上述实施例,本实施例进一步提出了一种多层级地图的端到端智能生成系统,如图4所示,包括训练模块10和生成模块20。
69.其中,训练模块10,用于建立多层级网络地图生成数据集,根据多层级网络地图生成数据集对多层级地图生成网络进行训练,多层级网络地图生成数据集包含遥感影像、地图图像、地理要素标签和层级标识。
70.生成模块20,用于将多层级遥感影像输入预先训练的多层级地图生成网络进行处理,生成多层级网络地图。
71.训练模块10的输出端与生成模块20的输入端相连。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。