1.本技术涉及水利设施技术领域,更具体地说,涉及一种明渠流量的测量装置。
背景技术:
2.明渠是农业灌溉的重要水利设施,为了指导农业灌溉的合理用水,提升灌溉用水的收益率,需要对明渠流量进行精确测量,但目前尚没有相应方案对明渠流量进行精确测量。
技术实现要素:
3.有鉴于此,本技术提供一种明渠流量的测量装置,用于对明渠流量进行精确测量。
4.为了实现上述目的,现提出的方案如下:
5.一种明渠流量的测量装置,所述测量装置包括用于置于明渠内的明渠流量箱、n个分层设置的超声换能器组、n个超声波时间信号处理设备和微控制器,n为大于1的整数,其中:
6.每个所述超声换能器组包括两组布置在同一平面上且路径相互交叉的超声波发射器和超声波接收器,所述超声波发射器与所述超声波接收器分别布置在所述明渠流量箱的两侧;
7.所述超声波信号处理器设备分别与对应的所述超声换能器组连接,用于对所述超声换能器组的超声波检测信号进行处理,得到第一飞行时间和第二飞行时间,并将所述第一飞行时间和第二飞行时间输出到所述微控制器;
8.所述微控制器与每个所述超声波信号处理器连接,用于接收n组所述第一飞行时间和第二飞行时间,并基于配置的动态模型对n组所述第一飞行时间和第二飞行时间进行计算,得到明渠流量值。
9.可选的,所述明渠流量箱的截面形状为矩形。
10.可选的,n层所述超声换能器组在所述明渠流量箱内等距分布。
11.可选的,所述超声波时间信号处理设备包括超声信号收发机和皮秒计时器,其中:
12.所述超声信号收发机分别与所述超声波发射器、所述超声波接收器连接,用于控制所述超声波发射器向所述超声波接收器发出超声波,所述超声波接收器检测所述超声波,并向所述超声波信号收发机反馈所述超声波检测信号;
13.所述皮秒计时器用于对所述超声波检测信号进行计时处理,得到所述第一飞行时间和所述第二飞行时间。
14.可选的,所述动态模型为:
15.x(k 1)=ax(k) bw(k)
16.y(k)=hx(k)
17.z(k)=hx(k) ε(k)
18.其中,x(k)为所述测量装置的内部状态变量,y(k)为所述测量装置的输出变量,w
(k)为水流流态和水质的扰动变量,ε(k)为测量装置的噪声变量。
19.可选的,所述微处理器配置有测量模块、预测模块和更新模块,其中:
20.所述测量模块用于获取所述第一飞行时间和所述第二飞行时间;
21.所述预测模块用于利用系统状态方程预测状态,同时计算预测量的协方差;
22.所述更新模块用于根据当前所述第一飞行时间、所述第二飞行时间和所述预测模块的输出值对所述明渠流量值进行更新迭代。
23.从上述的技术方案可以看出,本技术公开了一种明渠流量的测量装置,包括用于置于明渠内的明渠流量箱、n层交叉布置的超声换能器组、n组超声波时间信号处理设备和微控制器。每个超声换能器组布置在明渠流量箱的两侧;超声波信号处理器设备分别与对应的超声换能器组连接,用于对超声换能器组的超声波检测信号进行处理,得到第一飞行时间和第二飞行时间;微控制器用于接收n组第一飞行时间和第二飞行时间,并基于配置的动态模型对n组第一飞行时间和第二飞行时间进行计算,得到明渠流量值。从而实现对明渠流量的检测。
附图说明
24.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
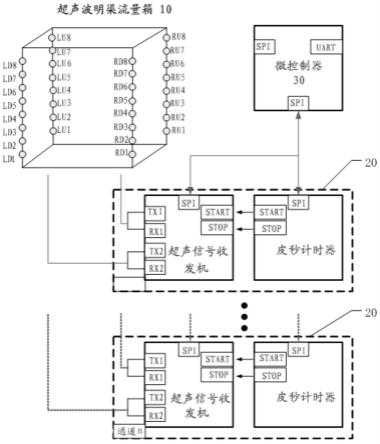
25.图1为本技术实施例的一种明渠流量的测量装置的示意图;
26.图2为本技术实施例的任意一层的交叉对射流速模型图;
27.图3为本技术实施例的超声波流量计的物理模型;
28.图4为本技术实施例的超声波流量计的物理模型对应的动态数学模型示意图;
29.图5为本技术实施例的卡尔曼滤波器构造的超声波流量计模型;
30.图6为本技术实施例的明渠流量的流速计算的示意图;
31.图7a为某测试渠道上的第一层超声探头测量出的轴向流速的计算结果;
32.图7b为某测试渠道上的第一层超声探头测量出的径向流速的计算结果;
33.图7c为某测试渠道上的第一层超声探头测量出的左右声道的超声波速度的计算结果。
具体实施方式
34.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
35.实施例
36.图1为本技术实施例的一种明渠流量的测量装置的示意图。
37.如图1所示,本实施例提供的测量装置用于对明渠中流水的流量值进行检测的,得到明渠流量值。该测量装置包括明渠流量箱10、n个分层设置的超声换能器组、n个超声波时
间信号处理设备20和微控制器30。其中,微控制器与每个超声波时间信号处理设备连接,每个超声波时间信号处理设备则与对应的超声换能器组连接。
38.本实施例中的明渠流量箱设置在待测量的明渠中,其截面为正方形。超声换能器组包括多个超声换能器ldi、rui、rdi和lui,分别设置在明渠流量箱的两侧内壁上,并在明渠流量箱内形成交叉对射的超声通道,本实施例中的技术方案有8层32个超声换能器,即i=1、2、
……
、8,从而构成8个超声换能器组,两两超声换能器组之间的垂直距离一般相等。超声换能器成对布置,一个作为超声波发射器、另一个则用作超声波接收器。
39.超声换能器采用的水声流量计专用换能器,发射频率为1mhz。微控制器采用低功耗芯片,完成通信、数据采集以及流量计算等功能。超声波时间信号处理设备采用专用的超声信号收发机及计时器配合使用,超声信号收发机可针对多种发射脉冲和频率、增益和信号阈值进行配置。同样,接收路径可编程设定。
40.这里的超声波时间信号处理设备包括超声信号收发机和皮秒计时器。超声信号收发机分别与对应的超声波发射器、超声波接收器连接,用于控制超声波发射器向超声波接收器发出超声波,超声波接收器检测超声波,并向超声波信号收发机反馈超声波检测信号;皮秒计时器用于对超声波检测信号进行计时处理,得到第一飞行时间和所述第二飞行时间。
41.微控制器用于接收每组超声波时间信号处理设备发送的多组第一飞行时间和第二飞行时间,并基于配置的动态模型进行计算的,得到待测明渠的明渠流量值。
42.从上述技术方案可以看出,本实施例提供了一种明渠流量的测量装置,包括用于置于明渠内的明渠流量箱、n层交叉布置的超声换能器组、n组超声波时间信号处理设备和微控制器。每个超声换能器组布置在明渠流量箱的两侧;超声波信号处理器设备分别与对应的超声换能器组连接,用于对超声换能器组的超声波检测信号进行处理,得到第一飞行时间和第二飞行时间;微控制器用于接收n组第一飞行时间和第二飞行时间,并基于配置的动态模型对n组第一飞行时间和第二飞行时间进行计算,得到明渠流量值。从而实现对明渠流量的检测。
43.本技术中的动态模型基于如下步骤分析得到:
44.图2为任意一层的交叉对射流速模型图。首先定义以下变量,u(x,y,z):轴向流速。w(x,y,z):径向流速。v
ax
:轴向平均流速。v
tr
:径向平均流速。c:声波在水中传播速度。υ
p
:水流流速在超声波线束上的投影流速。vs:超声波在超声波线束上的传播速度。si
,i=1,
…4:交叉对射布局的4个超声探头。α:超声波线束与水流方向的夹角。l:一对超声探头在水中的传播路径。
45.对于s1~s2超声波路径来说,投影流速为:
[0046][0047]
s1~s2顺流发射超声波在l1上的飞行时间t
12
为:
[0048][0049]
s1~s2逆流发射超声波在l上的飞行时间t
21
为:
[0050][0051]
而对于s3~s4超声波路径来说,投影流速为:
[0052][0053]
s3~s4顺流发射超声波在l2上的飞行时间t
34
为:
[0054][0055]
s3~s4逆流发射超声波在l2上的飞行时间t
43
为:
[0056][0057]
在实际的应用中,l1及l2超声波束上的径向流速、轴向流速及声速是不同的。同时测量的飞行时间包含有各种噪声信号。根据前面的推导,可以得到以下关系:
[0058][0059][0060][0061][0062]
上面的模型中,c1,分别为声道l1的声波波速、水流的轴向速度和径向速度分量。c2,分别为声道l2的声波波速、水流的轴向速度和径向速度分量。n1,n2,n3,n4,时间无关的白噪声。根据上面的关系,可以利用离散系统状态方程来描述非理想状态下的流速计算模型。系统状态分量x(k)为:
[0063][0064]
系统输出分量y(k)为:
[0065][0066]
测量噪声分量n(k)为:
[0067][0068]
测量过程模型为:
[0069]
x(k 1)=f(x(k))
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(14)
[0070]
y(k)=g(f(x(k)),x(k) n(k))
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(15)
[0071]
其中f(
·
)函数表示的是状态分量的演化过程关系,g(
·
)函数由公式(7)~(10)来描述,包含了水流的矢量分量及随机噪声对飞行时间的影响。
[0072]
图3给出了超声波流量计的物理模型。
[0073]
超声波流量计系统通过超声波的激励信号测量流速及流量,测量系统直接测量的是超声波的顺流及逆流飞行时间。流速及流量通过测量的飞行时间进行计算。飞行时间测量的准确度受到水流的状态,气泡等扰动的影响。测量输出的飞行时间同时受到测量系统本身的白噪声影响。
[0074]
图4所为超声波流量计的物理模型对应的动态模型的示意图。
[0075]
其动态模型为:
[0076]
x(k 1)=ax(k) bw(k)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(16)
[0077]
y(k)=hx(k)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(17)
[0078]
z(k)=hx(k) ε(k)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(18)
[0079]
x(k)是系统内部状态变量,如前面所定义的。y(k)是系统输出变量,也就是超声波飞行时间,如前面所定义。w(k)为水流流态,水质等的扰动变量。ε(k)为测量系统的噪声变量。为了便于处理,z(k)=[1/x
1 1/x
2 1/x
3 1/x4]
t
。根据前面关系可得:
[0080][0081]
动态模型采用的随机游走统计模型,即:
[0082]
c1(k 1)=c1(k) w1(k)
ꢀꢀ
(20)
[0083][0084][0085]
c2(k 1)=c2(k) w4(k)
ꢀꢀ
(23)
[0086][0087][0088]
根据上面的公式可以得到:
[0089][0090][0091]
所有的扰动及噪声假设满足高斯分布,相互之间是独立的且不相关的。从而可得各变量的期望值满足以下关系:
[0092]
e(w(k))=e(ε(k))=0
ꢀꢀ
(28)
[0093]
e(x(0))=x0ꢀꢀ
(29)
[0094]
各变量的方差及协方差满足以下关系:
[0095][0096][0097]
cov(w(j),ε(k))=0
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(32)
[0098]
cov(x(0),ε(k))=0
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(33)
[0099]
cov(w(k),x(0))=0
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(34)
[0100][0101]
随机游走统计模型的输出变量z的期望值及方差具有以下的关系:
[0102]
e(z(k))=x0ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(36)
[0103][0104]
根据卡尔曼滤波器的原理,系统状态变量的求解通过对真实值和估计值最小方差误差的原理进行计算:
[0105][0106]
图5为卡尔曼滤波器构造的超声波流量计模型。
[0107]
为提前一步预测的状态变量,为状态变量的估计值。p
*
(k)为误差协方差矩阵p(k)提前一步预测值。
[0108][0109][0110]
p
*
(k 1)=ap(k)a
t
q
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(41)
[0111]
k(k 1)=p
*
(k 1)h
t
(hp
*
(k 1)h
t
r)-1
ꢀꢀꢀꢀꢀꢀ
(42)
[0112]
p(k 1)=p
*
(k 1)-k(k 1)a
t
q
ꢀꢀꢀꢀꢀꢀꢀꢀ
(43)
[0113]
系统状态变量的估计值通过下式进行求解:
[0114][0115][0116]
通过上面的迭代可以计算出l1及l2的声波波速、水流的轴向速度和径向速度分量。
[0117]
图6为明渠流量的流速计算的示意图。
[0118]
该计算主要利用微控制器迭代进行运算。该算法主要有三个模块。第一个模块是测量模块,实时测量出s1~s2顺流发射超声波在l1上的飞行时间t
12
,s1~s2逆流发射超声波在l1上的飞行时间t21实时测量出s3~s4顺流发射超声波在l2上的飞行时间t
34
,s3~s4逆流发射超声波在l2上的飞行时间t
43
。第二个模块是预测模块,利用系统状态方程预测状态及输出,同时计算预测量的协方差。第三个模块是更新模块,根据当前的测量模块值和预测模块值对输出值进行更新迭代。输出轴向流速、径向流速,输出左右声道速度。同理,可以分别计算出其他层的流速及左右声道速度。
[0119]
图7a、图7b和图7c为某测试渠道上的第一层超声探头测量出的轴向流速、径向流速、左右声道的超声波速度计算结果。
[0120]
本说明书中的各个实施例均采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似的部分互相参见即可。
[0121]
本领域内的技术人员应明白,本发明实施例的实施例可提供为方法、装置、或计算机程序产品。因此,本发明实施例可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本发明实施例可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。
[0122]
本发明实施例是参照根据本发明实施例的方法、终端设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理终端设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理终端设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
[0123]
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理终端设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包
括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
[0124]
这些计算机程序指令也可装载到计算机或其他可编程数据处理终端设备上,使得在计算机或其他可编程终端设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程终端设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
[0125]
尽管已描述了本发明实施例的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例做出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本发明实施例范围的所有变更和修改。
[0126]
最后,还需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者终端设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者终端设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者终端设备中还存在另外的相同要素。
[0127]
以上对本发明所提供的技术方案进行了详细介绍,本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
