1.本发明涉及机器人技术领域,尤其涉及一种基于深度学习的移动机器人重定位方法。
背景技术:
2.随着人工智能技术的日趋成熟,机器人也从工业机器人逐步向方便人们生活所用的智能移动机器人发展,当机器人跟踪失败或上电重启时均须使用重定位技术恢复机器人的当前位姿,否则机器人无法对环境继续建图或精确定位,因此重定位对于移动机器人具有重要的意义。
3.专利申请202210165624.3,公开了一种基于深度学习的自主移动机器人定位方法,借助于预先训练的深度学习神经网络对位置信息和检测数据进行校正处理,进而提升自主移动机器人定位的精度,对应现有移动机器人精准度的要求还有待提高,为此,本技术提出一种基于深度学习的移动机器人重定位方法。
技术实现要素:
4.本发明的目的是为了解决现有技术中存在的缺点,而提出的一种基于深度学习的移动机器人重定位方法。
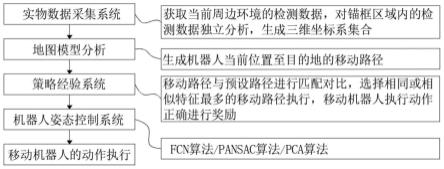
5.为了实现上述目的,本发明采用了如下技术方案:一种基于深度学习的移动机器人重定位方法,所述移动机器人包括机器人姿态控制系统、实物数据采集系统、地图模型分析和策略经验系统,所述重定位方法包括以下具体步骤:s1、移动机器人的实物数据采集系统,获取当前周边环境的检测数据,对锚框区域内的检测数据独立分析,生成三维坐标系集合,以离线地图模型进行储存;s2、移动路径的生成,地图模型分析对收集的三维坐标系集合进行分析,生成机器人当前位置至目的地的移动路径;s3、策略经验系统的特征评估,步骤s2中生成的多条移动路径,与预设路径进行匹配对比,选择相同或相似特征最多的移动路径执行,移动机器人执行动作正确进行奖励,反之,移动机器人执行动作偏离轨迹进行惩罚;s4、移动机器人的姿态调控,移动机器人获取外界环境的三维坐标点,抽取平面上的法线向量方向,确定机器人在三维空间中的坐标和设备姿态;s5、移动机器人的动作执行。
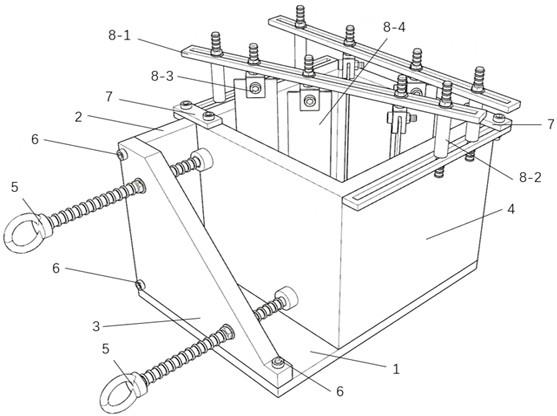
6.优选地,所述实物数据采集系统包括视觉相机、激光测距传感器和锚框照明,锚框照明将高频率的光脉冲照射到外界物体上,以若干个点光源的形式组建成或矩形或圆形的检测区域,即锚框区域,利用视觉相机和激光测距传感器检测锚框区域内的三维坐标。
7.优选地,所述离线地图模型在像素平面上的像素坐标系和检测的所述点光源三维坐标系对应,离线地图模型的坐标系到检测的三维坐标系关系如下:,外界空间任意点的三
维坐标系,可以通过一个3
×
3的旋转矩阵k和一个3
×
1的平移向量t对应起来。
8.优选地,所述步骤s3中策略经验系统,是指移动机器人对检测的外界数据进行深化学习,通过分层次的多层网络得到特征学习,从而使机器理解学习数据,获得执行动作的特征信息。
9.优选地,所述深化学习是指采用actor-critic框架,actor选出动作网络、输入状态、输出状态,critic网络评价动作网络、输入状态、输出动作值,对目标值与动作值的差和其导数,作为误差分析,判断误差小则获得奖励多。
10.优选地,所述步骤s4中移动机器人的姿态调控,机器人姿态控制系统先用fcn算法提取锚框区域内的检测数据,用随机样本一致性算法去除测量误差,最后利用主成分分析算法分析生成离线地图模型。
11.本发明具有以下有益效果:1、本技术提出的移动机器人重定位方法,利用实物数据采集系统、地图模型分析,移动路径的生成匹配离线地图模型的导航路径,实现对移动机器人重定位,避免机器人数据丢失无法定位的情况发生,通过设置锚框照明,提高视觉相机餐具周边环境数据的精准度,从而实现提高定位精度的效果。
12.2、本技术提出的移动机器人重定位方法,通过设置测量经验系统,在移动机器人运行的过程中,对执行动作实行奖惩评价,奖励之后的执行动作发生概率就会增加,反之,惩罚之后的执行动作发生概率就会降低,加速机器人策略学习过程,从而促使机器人分析和理解检测数据,提高执行精度。
附图说明
13.图1为本发明提出的重定位方法系统示意图;图2为本发明提出的锚框区域数据采集示意图。
具体实施方式
14.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
15.在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
16.参照图1-2,一种基于深度学习的移动机器人重定位方法,所述移动机器人包括机器人姿态控制系统、实物数据采集系统、地图模型分析和策略经验系统,所述实物数据采集系统包括视觉相机、激光测距传感器和锚框照明,锚框照明将高频率的光脉冲照射到外界物体上,以若干个点光源的形式组建成或矩形或圆形的检测区域,即锚框区域,利用视觉相机和激光测距传感器检测锚框区域内的三维坐标,机器视觉相机检测系统包括照明、镜头和相机三大块,由于环境光有可能影响图像的质量,以及图像对比度小造成检测误差大,通过设置锚框照明,提高视觉相机餐具周边环境数据的精准度。
17.所述离线地图模型在像素平面上的像素坐标系(xa,ya,za)和检测的点光源三维
坐标系(xn,yn,zn)对应,离线地图模型的坐标系到检测的三维坐标系关系如下:,外界空间任意点的三维坐标系,可以通过一个3
×
3的旋转矩阵k和一个3
×
1的平移向量t对应起来。
18.所述重定位方法包括以下具体步骤:s1、移动机器人的实物数据采集系统,获取当前周边环境的检测数据,对锚框区域内的检测数据独立分析,生成三维坐标系集合,以离线地图模型进行储存;s2、移动路径的生成,地图模型分析对收集的三维坐标系集合进行分析,生成机器人当前位置至目的地的移动路径;s3、策略经验系统的特征评估,策略经验系统,是指移动机器人对检测的外界数据进行深化学习,通过分层次的多层网络得到特征学习,从而使机器理解学习数据,获得执行动作的特征信息,深化学习是指采用actor-critic框架,actor选出动作网络、输入状态、输出状态,critic网络评价动作网络、输入状态、输出动作值,对目标值与动作值的差和其导数,作为误差分析,判断误差小则获得奖励多;步骤s2中生成的多条移动路径,与预设路径进行匹配对比,选择相同或相似特征最多的移动路径执行,移动机器人执行动作正确进行奖励,反之,移动机器人执行动作偏离轨迹进行惩罚;s4、移动机器人的姿态调控,机器人姿态控制系统先用fcn算法提取锚框区域内的检测数据,用随机样本一致性算法(pansac算法)去除测量误差,最后利用主成分分析算法(pca算法)分析生成离线地图模型,移动机器人获取外界环境的三维坐标点,抽取平面上的法线向量方向,确定机器人在三维空间中的坐标和设备姿态;s5、移动机器人的动作执行,移动机器人中断通信或者数据丢失,重新启动的时候,利用实物数据采集系统、地图模型分析,移动路径的生成匹配离线地图模型的导航路径,实现对移动机器人重定位,遵从机器人姿态控制系统的导航继续执行后续作业。
19.本实施例中,通过设置测量经验系统,在移动机器人运行的过程中,对执行动作实行奖惩评价,奖励之后的执行动作发生概率就会增加,反之,惩罚之后的执行动作发生概率就会降低,加速机器人策略学习过程,从而促使机器人分析和理解检测数据,提高执行精度。
20.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。