一种基于深度展开网络的大斜视sar高分辨成像方法
技术领域
1.本发明涉及信号与信息处理、深度学习技术,具体涉及一种基于深度展开网络的sar大斜视高分辨成像算法。
背景技术:
2.合成孔径雷达(synthetic aperture radar,sar)作为一种主动传感器,可以对目标进行全天候、全天时、高分辨观测,并且具备很强的穿透性,因此广泛应用于军事和民用领域。
3.斜视sar由于具有灵活的波束指向,相比正侧视sar成像具备提前探测斜前视的能力,可以实现对敌方目标的实时侦察,因此研究大斜视角下的sar成像算法具有重要的意义。大斜视sar回波信号具有距离向/方位向严重耦合、大距离徙动特点,因此常规的正侧视成像法不再适用于大斜视条件下的成像要求。shuyan wang等在《modified range-doppler imaging method for the high squint sar》(2010 ieee radar conference,2010,pp.1450-1453)提出一种基于keystone变换和秩亏的改进距离多普勒(range doppler,rd)算法,得到了较为精细的sar图像。wenna fan在《modified range-doppler algorithm for high squint sar echo processing》(ieee geoscience and remote sensing letters,vol.16,no.3,pp.422-426)提出一种改进的距离多普勒成像算法用以处理大斜视sar回波信号,该方法直接在距离频域校正距离单元迁移,所提算法在方位压缩采用更为精细的四阶相位模型来实现,最终通过几何校正获得聚焦的大斜视sar图像。yan wang在《a new nonlinear chirp scaling algorithm for high-squint high-resolution sar imaging》(ieee geoscience and remote sensing letters,vol.14,no.12,pp.2225-2229)提出一种非线性调频变标(non linear scaling,ncs)的大斜视sar成像算法,该方法基于更加精细的二维频谱,将新的调频变标因子引入到距离多普勒域进行插值校正剩余距离偏移相位以及设计新的扰动函数消除多普勒相位对方位角的依赖性,该方法较传统ncs算法成像质量更高。h.huang在《an approach for high squint space-borne sar imaging based on generalized scale transform》(2020 iet international radar conference,2020,pp.1161-1165)提出一种新的基于广义尺度变换的大斜视星载sar成像方法。在对回波信号进行距离压缩后,该方法首先根据雷达波束中心参数校正距离走动;然后,参考倾斜范围用于进行粗调聚焦;之后,进行stolt插值补偿剩余相位。最后进行广义尺度变换,消除方位空变影响,经过几何变形校正后得到聚焦良好的sar成像结果。
4.然而,目前许多的大斜视sar成像算法不管在时域成像算法以及频域成像算法都存在着不足。对于时域成像算法,例如后向投影算法(back projection,bp)虽能够精确成像,但是算法需要对观测场景逐点遍历成像,因此在成像时间上不符合sar实时成像的要求。对于频域成像算法,包括rd、距离徙动算法(range migration,rma)以及ncs算法在进行距离徙动补偿时均采用了不同程度的近似,其构造相位补偿函数、方位压缩函数的难度较大,计算复杂度较高,并且随着斜视角的增大,算法的成像质量逐渐下降。
技术实现要素:
5.本发明的目的在于克服上述成像方法中的不足,提出一种基于深度展开网络的大斜视sar高分辨成像方法,包括下列步骤:
6.步骤一:构建大斜视sar回波信号观测模型确定成像网络所需要学习的成像矩阵;首先根据传统的成像算法对瞬时斜距表达式进行泰勒级数展开,对回波数据在距离频域上做距离走动校正处理,再对走动校正处理后的回波信号进行距离压缩,得到距离压缩后的信号,从而确定成像网络所需学习的矩阵为二次距离压缩、三次相位补偿矩阵和方位向压缩矩阵;
7.步骤二:根据步骤一确定的可学习参数,构建相应的成像网络,将上述两个矩阵作为可学习的参数,通过网络学习得到相比传统算法更加精确的成像矩阵,从而提高成像精度、改善聚焦效果;成像方法结合传统rd成像算法步骤以及ista求解算法构建成像网络。
8.在本发明的一个实施例中,步骤一具体包括下述步骤:
9.step 1)构建大斜视sar回波信号观测模型,根据传统的成像算法对雷达与目标之间的距离做泰勒级数展开,得到近似距离rb(τ;r
。
),其中τ为慢时间变量,rb(τ;rc)由雷达到观测场景中心的距离rc、速度以及斜视角共同决定,计算回波时延τa=2rb(τ;rc)/c,c是电磁波速;具体如下:
10.在sar大斜视成像系统与观测场景之间的位置关系中,平台的高度为h,斜视角为θ0,假设平台作匀速直线运动,速度为vr,r0为航线与观测场景中心的最近距离,rb(t,τ;r0)为平台与点目标之间的瞬时斜距,其中t为快时间变量,τ为慢时间变量;通过瞬时斜距与慢时间之间的关系建立起sar平台与点目标的几何关系,设坐标原点o点为慢时间的起点,建立慢时间-斜距的直角坐标系,此时,波束中心射线与通过p点而与航线平行的线相交于a点,a点同样为慢时间的起点,t0为波束中心穿越时刻,则根据余弦定理得到平台与点目标p之间的瞬时斜距为
[0011][0012]
式中,yn表示为点目标p与点a之间的距离;
[0013]
假设雷达发射线性调频信号lfm,调频率为kr,脉冲宽度为t
p
,则平台接收到的基带回波信号为
[0014][0015]
其中ζ为雷达工作波长,rect(
·
)为其包络,τa=2rb(τ,rc)/c表示为回波时延;kr为线性调频信号的调频率;
[0016]
将rb(τ;rc)进行泰勒级数展开得到
[0017][0018]
从式(3)看出,线性项为距离走动项,高次项为距离弯曲项,当斜视角足够大时,高次项的值很小,因此能够忽略距离弯曲对包络的影响;结合式(2)、(3)看出距离弯曲项和雷达波长处于同一个数量级,因此不能忽略距离弯曲对回波相位的影响;
[0019]
step 2)将平台获取的回波信号sr(t,τ;rc)在距离向上做fft得到距离频域的回波
信号,构造走动补偿函数以及距离压缩函数h1降低距离向/方位向的耦合程度,得到压缩后的回波信号sr′
(fr,τ1;rc),其中t为快时间变量,fr为距离向频域,等效慢时间序列此时,回波信号经过走动校正、距离压缩后的多普勒中心频率被搬移到零频处,因此雷达发射波束的中心线位于零多普勒平面;具体如下:
[0020]
下面将回波信号变换到距离频域上,忽略两个维度的信号包络,对其进行距离走动校正和距离向脉冲压缩;
[0021]
走动误差为
[0022]
δrw=vrτsinθ0ꢀꢀꢀ
(4)
[0023]
构造的距离走动补偿、压缩函数为
[0024][0025]
式中,fr为距离向频域、f0为雷达工作频率;
[0026]
经过以上操作得到的回波信号为
[0027][0028]
其中,rd(τ1,rc)为距离走动、压缩之后等效的瞬时斜距,τ1为距离走动、压缩之后等效的慢时间序列,具体如下:
[0029][0030][0031]
将上述两个函数作为可学习变量让成像网络学习训练到更为精确的补偿矩阵;
[0032]
step 3)根据大斜视sar成像算法确定网络可学习的成像矩阵为二次距离压缩矩阵h2和方位向匹配滤波函数h3,并将rd成像过程写成矩阵相乘形式其中fr、fa分别为距离向和方位向的傅里叶变换矩阵,f
r-1
、f
a-1
为其逆变换矩阵,s为大斜视条件下的回波矩阵,h1为步骤一中距离走动校正、压缩函数h1(fr,τ)的矩阵形式,h2为二次距离压缩和三次相位补偿函数的矩阵形式,h3为方位向压缩函数的矩阵形式,表示hadamard乘积,θ为观测场景散射系数矩阵,m(s)为该成像算法的算子形式;具体如下:
[0033]
结合式(2)、(5)将大斜视sar的成像算法过程写成矩阵相乘形式
[0034][0035]
利用该成像的逆过程得到原始回波数据,逆过程表示为
[0036]
[0037]
其中*表示矩阵共轭操作,m-1
即为成像过程(9)的逆过程。
[0038]
在本发明的另一个实施例中,步骤二具体包括下述步骤:
[0039]
step 1)根据步骤一确定的可学习成像矩阵,写出其成像过程,并结合sar成像问题能够被看作一个逆问题的求解思路,将成像过程的通过ista算法进行求解,具体的ista求解表达式为其中λ||θ||
p
为正则化约束项,λ为正则化参数,表示为l2范数,sr为大斜视sar的真实回波,为估计得到的观测场景散射系数矩阵,||
·
||
p
为p范数;具体如下:
[0040]
根据式(9)、(10)的分析,将sar成像看作为一个线性求解的逆问题,该二维观测模型通过求解最优化问题得到
[0041][0042]
step 2)将ista算法的求解过程深度展开成网络形式,构建相应的网络子层,分别为残差子层、算子更新子层、非线性变换子层;具体如下:
[0043]
利用ista算法求解式(11)过程中,ista算法分为残差计算、算子更新以及软阈值迭代三个步骤,因此在深度展开网络中,同样在网络的第1层构建相应的三个子网络层,具体描述为:
[0044]
(1)残差子层:用r表示,该子网络层用来计算回波信号的残差,在成像网络的第k层中,通过第k-1层输出的场景散射系数计算关于大斜视回波信号sr的残差,具体的表达式为
[0045][0046]
其中表示第k层网络迭代的残差,为第k层的散射系数,k为所在的网络层数,sr为大斜视sar的真实回波,m-1
为rd成像算法的逆过程;深度展开网络中的m-1
是一个变量,当成像矩阵h2、h3在误差反向传播后发生变化时,m-1
随之发生变化;
[0047]
(2)算子更新子层:用p表示,该子网络层的输入为残差层计算得到的残差,并作用于m,具体表达式为
[0048][0049]
其中,为场景散射系数矩阵之间的残差,为残差子层计算得到的真实回波信号与估计回波信号之间的残差,p
(k)
为更新之后的算子,为第k层估计得到的场景散射系数β为迭代步长,是一个可学习的参数;
[0050]
(3)非线性变换子层:用f表示,该子网络层用来体现成像网络的非线性映射能力,通过对算子更新层得到的p
(k)
进行非线性变换,获取大斜视sar回波信号到场景散射系数的非线性映射能力,同时输出下一层的场景散射系数具体表达式为
[0051]
[0052]
f(p
(k)
;λ,t)=soft(p
(k)
;λ,t)
ꢀꢀꢀ
(16)
[0053]
其中,f(
·
)为成像网络的非线性变换函数,将其设置为软阈值函数soft(
·
),soft(p
(k)
;λ,t)即为与正则化参数λ有关的软阈值函数,在所构建的成像网络中,将其直接作为非线性变换层的激活函数,t为迭代阈值;该网络层可学习的参数可以为迭代阈值t,正则化参数λ;
[0054]
综上所述,所构建的大斜视sar lrd成像网络的单层拓扑结构由残差层、算子更新层、非线性变换层三个子网络层构成,并且可学习的参数集为ω={h2,h3,β,t,λ};在网络训练过程中为了减小网络学习参数的规模,成像矩阵h2、h3仅在一轮反向传播训练后发生变化,迭代参数β、t、λ在每一层中则是可变的;
[0055]
step 3)构建回波训练样本集,本发明采用理想的随机点散射模型并根据大斜视sar的观测模型生成大斜视sar回波,加入系统环境噪声,在不改变sar成像模型的情况下生成大量回波数据样本;具体如下:
[0056]
采用理想的随机点散射模型并根据式(2)的回波信号模型生成大斜视sar回波,加入系统环境噪声,在不改变sar成像模型的情况下生成大量回波数据样本;设定回波样本数量为n,真实回波样本集sn={s1,s2,s3,...,sn},其中n=1,2,...,n为回波样本序列号;
[0057]
step 4)将均方误差mse作为损失函数实现对大斜视sar成像网络的非监督训练,采用基于随机梯度下降的adam优化算法对网络进行优化,最终成像时,将网络学习得到的成像矩阵h2、h3,迭代步长、正则化参数、迭代阈值作为固定值输入成像网络,成像过程就转化成一个网络的前馈运算,能够直接输出成像结果;具体如下:
[0058]
直接利用网络最后一层得到的场景散射系数估计值作用于m-1
,得到sar回波的估计值并与真实回波进行对比;其回波估计值表达式如式(17)所示,设定损失函数为均方误差函数mse,具体表达式如式(18)所示
[0059][0060][0061]
其中,表示第n个估计得到的大斜视sar回波,n为回波样本的序列号,其范围为n=1,2,...,n,式(17)得到的是估计的第n个大斜视sar回波;loss(ω)为可学习参数集ω的损失函数;这里的ω=arg min(loss(ω))是为了网络收敛之后得到比较精确的可学习参数集。
[0062]
在本发明的又一个实施例中,,在步骤二的step 2)中,软阈值函数soft(
·
)的具体表达式为符号函数sign(
·
)
[0063]
f(p
(k)
;λ,t)=soft(p
(k)
;λ,t)=sign(p
(k)
)
·
(p
(k)
|-t)
ꢀꢀ
(16-1)
[0064]
公式(16-1)中,sign函数对后面第一括号项先进行sign计算,之后,将sign计算结果与第二括号项相乘。
[0065]
该方法将大斜视sar成像方法与深度学习结合,利用rd成像的步骤构建基于深度展开网络的rd学习成像网络结构,将大斜视sar成像看作为一个线性求逆问题并结合传统
成像步骤将求解sar问题展开成网络形式,利用网络的深层迭代得到目标场景散射系数,进一步得到大斜视sar图像。该方法在网络参数收敛的条件下,能够对大斜视sar回波信号进行精确成像,成像质量明显优于传统的大斜视成像算法,同时成像时间与改进的rd成像方法处于同一数量级,符合大斜视条件下的sar成像要求。
[0066]
本发明的有益效果在于:一方面,克服了现有sar成像算法中需要构造较为复杂的补偿函数,成像精度以及效率不高的缺点。另一方面,由于采取深度学习的方法进行成像,通过学习的方式避免了补偿函数的设计,并且获得比传统算法更为精确的成像矩阵,成像质量得到明显提高。提出的基于深度展开网络的sar大斜视距离多普勒高分辨成像算法,能够在成像网络中所有参数固定后,仅需输入大斜视sar回波信号,就能快速得到一幅精确的sar图像,该成像方法复杂度较低,经过仿真验证,所提方法可以对点目标、真实场景目标进行高分辨二维成像,有效抑制旁瓣,提高成像精度和计算效率,在斜视角增大的条件下,成像质量也优于其它成像算法,符合大斜视条件下的sar成像要求。
附图说明
[0067]
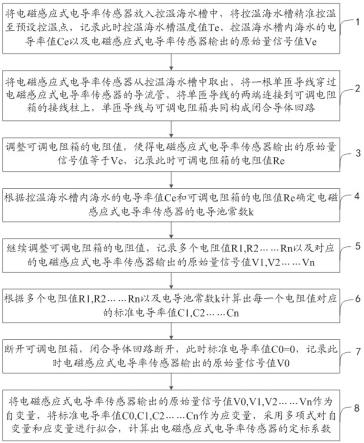
图1为本发明方法的流程图;
[0068]
图2(a)为大斜视sar成像示意图,图2(b)为雷达与目标的几何关系图;
[0069]
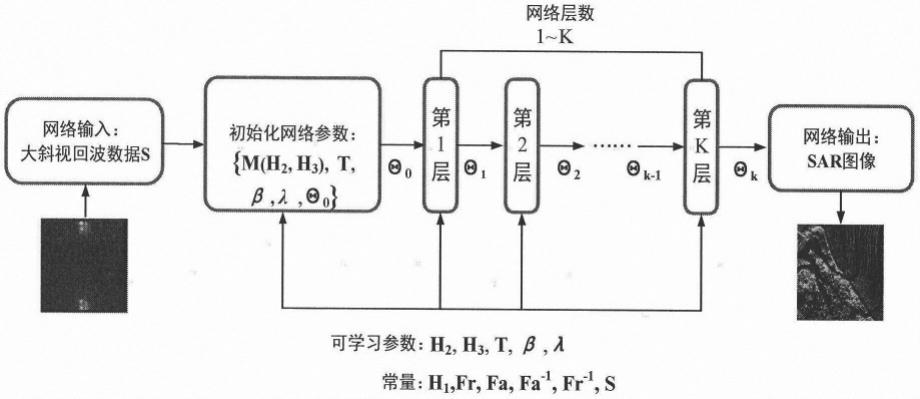
图3(a)为大斜视sar成像网络结构图,图3(b)为单层网络的结构示意图;
[0070]
图4为成像网络非监督训练结构示意图;
[0071]
图5为不同网络层数下的误差曲线图;
[0072]
图6(a)为仿真的散射点模型图,图6(b)为信噪比15db、45
°
条件下改进rd成像算法结果图,图6(c)为信噪比15db、45
°
条件下l
2 ista算法成像结果图,图6(d)为信噪比15db、45
°
条件下所提发明方法的成像结果图;
[0073]
图7(a)rd算法的距离向剖面图,图7(b)为l
2 ista算法的距离向剖面图,图7(c)为所提成像算法的距离向剖面图,图7(d)为rd、l
2 ista、所提发明方法的方位向剖面图;
[0074]
图8(a)为信噪比15db、45
°
条件下rd、l
2 ista、所提发明方法的海面舰船目标结果图,图8(b)为信噪比15db、70
°
条件下rd、l
2 ista、所提发明方法的海面舰船目标结果图。
具体实施方式
[0075]
本发明通过下列步骤实现:构建大斜视sar回波观测模型,根据点目标与平台之间的几何关系得到瞬时斜距,对得到的回波信号在距离频域上进行距离走动补偿降低距离方位的耦合程度,通过传统的sar大斜视成像算法《high squint mode sar imaging using modified rd algorithm》(2013 ieee china summit and international conference on signal and information processing,2013,pp.589-592)确定可学习的成像矩阵h2、h3,其中h2为二次距离压缩和三次相位补偿矩阵,h3为方位向压缩矩阵。将成像算法写成矩阵相乘形式,并以ista算法求解为例,将ista求解散射场景系数的步骤深度展开成网络形式,从而获取大斜视sar回波信号到场景散射系数的非线性拟合能力,在网络经过训练后,参数固定时,输入一个回波信号即可通过网络的一次前馈运算输出大斜视sar图像,本发明的整体流程如图1所示。具体说明如下:
[0076]
步骤一:构建大斜视sar回波信号观测模型确定成像网络所需要学习的成像矩阵。
首先根据传统的成像算法对瞬时斜距表达式进行泰勒级数展开,对回波数据在距离频域上做距离走动校正处理,再对走动校正处理后的回波信号进行距离压缩,得到距离压缩后的信号,从而确定成像网络所需学习的矩阵为二次距离压缩、三次相位补偿矩阵和方位向压缩矩阵。
[0077]
步骤一具体包括下述步骤:
[0078]
step 1)构建大斜视sar回波信号观测模型,根据传统的成像算法对雷达与目标之间的距离做泰勒级数展开,得到近似距离rb(τ;rc),其中τ为慢时间变量,rb(τ;rc)由雷达到观测场景中心的距离rc、速度以及斜视角共同决定,计算回波时延τa=2rb(τ;rc)/c,c是电磁波速;
[0079]
如图2(a)所示为sar大斜视成像系统与观测场景之间的位置关系,其中,平台的高度为h,斜视角为θ0,假设平台作匀速直线运动,速度为vr,r0为航线与观测场景中心的最近距离,rb(t,τ;r0)为平台与点目标之间的瞬时斜距,其中t为快时间变量,τ为慢时间变量。通过瞬时斜距与慢时间之间的关系可建立起如图2(b)所示的sar平台与点目标的几何关系,设坐标原点o点为慢时间的起点,建立慢时间-斜距的直角坐标系,此时,波束中心射线与通过p点而与航线平行的线相交于a点,a点同样为慢时间的起点,t0为波束中心穿越时刻,则根据余弦定理可以得到平台与点目标p之间的瞬时斜距为
[0080][0081]
式中,yn表示为点目标p与点a之间的距离。
[0082]
假设雷达发射线性调频信号(linear frequency modulation,lfm),调频率为kr,脉冲宽度为t
p
,则平台接收到的基带回波信号为
[0083][0084]
其中ζ为雷达工作波长,rect(
·
)为其包络,τa=2rb(τ,rc)/c表示为回波时延。kr为线性调频信号的调频率。
[0085]
传统的rd成像算法是将公式(1)进行二阶近似,忽略高阶项带来的误差,直接在距离多普勒域进行距离徙动校正,经过距离压缩和方位压缩成像。算法未考虑大斜视回波信号的特点,因此不符合大斜视角条件下的成像要求。
[0086]
下面将rb(τ;rc)进行泰勒级数展开得到
[0087][0088]
从式(3)可以看出,线性项为距离走动项,高次项为距离弯曲项,当斜视角足够大时,高次项的值很小,因此可以忽略距离弯曲对包络的影响。结合式(2)、(3)可以看出距离弯曲项和雷达波长处于同一个数量级,因此不可以忽略距离弯曲对回波相位的影响。
[0089]
step 2)将平台获取的回波信号sr(t,τ;rc)在距离向上做fft得到距离频域的回波信号,构造走动补偿函数以及距离压缩函数h1降低距离向/方位向的耦合程度,得到压缩后的回波信号sr′
(fr,τ1;rc),其中t为快时间变量,fr为距离向频域,等效慢时间序列此时,回波信号经过走动校正、距离压缩后的多普勒中心频率被搬移到零频处,
因此雷达发射波束的中心线位于零多普勒平面。
[0090]
下面将回波信号变换到距离频域上,忽略两个维度的信号包络,对其进行距离走动校正和距离向脉冲压缩。
[0091]
走动误差为
[0092]
δrw=vrτsinθ0ꢀꢀꢀ
(4)
[0093]
构造的距离走动补偿、压缩函数为
[0094][0095]
式中,fr为距离向频域、f0为雷达工作频率。
[0096]
此时,经过走动校正、距离压缩后的回波信号,多普勒中心的频率搬移到零频,因此雷达发射波束的中心线位于零多普勒平面。经过以上操作得到的回波信号为
[0097][0098]
其中,rd(τ1,rc)为距离走动、压缩之后等效的瞬时斜距,τ1为距离走动、压缩之后等效的慢时间序列,具体如下:
[0099][0100][0101]
经过压缩后的信号,距离向和方位向的耦合程度大大降低,但仍存在着残余距离徙动以及距离弯曲项对相位的影响。改进的rd算法在二维频域上分别构造二次距离压缩、三次相位补偿函数以及方位向脉冲压缩函数解决上述问题,在构造上述函数时采用不同程度的近似,当斜视角增大时成像质量明显下降,因此可将上述两个函数作为可学习变量让成像网络学习训练到更为精确的补偿矩阵。
[0102]
step 3)根据大斜视sar成像算法确定网络可学习的成像矩阵为二次距离压缩矩阵h2和方位向匹配滤波函数h3,并将rd成像过程写成矩阵相乘形式其中fr、fa分别为距离向和方位向的傅里叶变换矩阵,f
r-1
、f
a-1
为其逆变换矩阵,s为大斜视条件下的回波矩阵,h1为步骤一中距离走动校正、压缩函数h1(fr,τ)的矩阵形式,h2为二次距离压缩和三次相位补偿函数的矩阵形式,h3为方位向压缩函数的矩阵形式,表示hadamard乘积,θ为观测场景散射系数矩阵,m(s)为该成像算法的算子形式。
[0103]
为了更好地描述可学习参数与成像结果的关系,结合式(2)、(5)将大斜视sar的成像算法过程写成矩阵相乘形式
[0104][0105]
上述成像算法是一个可逆的过程,即可以利用该成像的逆过程得到原始回波数
据,逆过程表示为
[0106][0107]
其中*表示矩阵共轭操作,m-1
即为成像过程(9)的逆过程。
[0108]
步骤二:根据步骤一确定的可学习参数,构建相应的成像网络,将上述两个矩阵作为可学习的参数,通过网络学习得到相比传统算法更加精确的成像矩阵,从而提高成像精度、改善聚焦效果。成像方法结合传统rd成像算法步骤以及ista求解算法构建成像网络。
[0109]
步骤二具体包括下述步骤:
[0110]
step 1)根据步骤一确定的可学习成像矩阵,写出其成像过程,并结合sar成像问题可以看作一个逆问题的求解思路,将成像过程的通过ista算法进行求解,具体的ista求解表达式为其中λ||θ||
p
为正则化约束项,λ为正则化参数,表示为l2范数,sr为大斜视sar的真实回波,为估计得到的观测场景散射系数矩阵,||
·
||
p
为p范数。
[0111]
根据式(9)、(10)的分析,sar成像可以看作为一个线性求解的逆问题,该二维观测模型可以通过求解最优化问题得到
[0112][0113]
step 2)将ista算法的求解过程深度展开成网络形式,构建相应的网络子层,分别为残差子层、算子更新子层、非线性变换子层;
[0114]
以ista算法求解式(11)为例,ista算法主要分为残差计算、算子更新以及软阈值迭代三个步骤,因此在深度展开网络中,同样在网络的第/层构建相应的三个子网络层,具体描述为:
[0115]
(1)残差子层:用r表示,该子网络层用来计算回波信号的残差,在成像网络的第k层中,通过第k-1层输出的场景散射系数计算关于大斜视回波信号sr的残差,具体的表达式为
[0116][0117]
其中表示第k层网络迭代的残差,为第k层的散射系数,k为所在的网络层数,sr为大斜视sar的真实回波,m-1
为rd成像算法的逆过程。需要注意的是,深度展开网络中的m-1
是一个变量,当成像矩阵h2、h3在误差反向传播后发生变化时,m-1
随之发生变化,而传统ista则是由回波信号形式直接决定。
[0118]
(2)算子更新子层:用p表示,该子网络层的输入为残差层计算得到的残差,并作用于m,具体表达式为
[0119][0120][0121]
其中,为场景散射系数矩阵之间的残差,为残差子层计算得到的真实回
波信号与估计回波信号之间的残差(通过上面的公式(12)可算得),p
(k)
为更新之后的算子,为第k层估计得到的场景散射系数(是每一层网络的输出),β为迭代步长,在传统ista中每一次迭代中,β的值是固定的,而在成像网络中是一个可学习的参数。
[0122]
(3)非线性变换子层:用f表示,该子网络层用来体现成像网络的非线性映射能力,通过对算子更新层得到的p
(k)
进行非线性变换,获取大斜视sar回波信号到场景散射系数的非线性映射能力,同时输出下一层的场景散射系数具体表达式为
[0123][0124]
f(p
(k)
;λ,t)=soft(p
(k)
;λ,t)=sign(p
(k)
)
·
(|p
(k)
|-t)
ꢀꢀꢀ
(16)
[0125]
其中,f(.)为成像网络的非线性变换函数,通常将其设置为软阈值函数soft(
·
)(参见《two-step iterative shrinkage thresholding algorithms for lmage restoration》,ieee transactions on image processing,2007,16(12):2992-3004.),soft(p
(k)
;λ,t)即为与正则化参数λ有关的软阈值函数,软阈值函数的具体表达式一般为符号函数sign(
·
),在所构建的成像网络中,将其直接作为非线性变换层的激活函数,t为迭代阈值。公式(16)中,sign函数对后面第一括号项先进行sign计算,之后,将sign计算结果与第二括号项相乘。该网络层可学习的参数可以为迭代阈值t,正则化参数λ。
[0126]
综上所述,所构建的大斜视sar lrd成像网络的单层拓扑结构由残差层、算子更新层、非线性变换层三个子网络层构成,并且可学习的参数集为ω={h2,h3,β,t,λ}。需要说明的是,在网络训练过程中为了减小网络学习参数的规模,成像矩阵h2、h3仅在一轮反向传播训练后发生变化,迭代参数β、t、λ在每一层中则是可变的。
[0127]
step 3)构建回波训练样本集,本发明采用理想的随机点散射模型并根据大斜视sar的观测模型生成大斜视sar回波,加入系统环境噪声,在不改变sar成像模型的情况下生成大量回波数据样本。
[0128]
回波样本生成方面,由于样本生成是训练和测试前的预处理,是可以离线完成的,因此样本生成的准确性比时间开销和计算负担更重要。同时,由于完全准确的真实散射信息难以获得,实际测量数据很难建立有效的样本集,为了得到较为精确的回波样本集,本发明采用理想的随机点散射模型并根据式(2)的回波信号模型生成大斜视sar回波,加入系统环境噪声,在不改变sar成像模型的情况下生成大量回波数据样本。设定回波样本数量为n,真实回波样本集sn={s1,s2,s3,...,sn},其中n=1,2,...,n为回波样本序列号。
[0129]
step 4)将均方误差(mse)作为损失函数实现对大斜视sar成像网络的非监督训练,采用基于随机梯度下降的adam优化算法对网络进行优化,最终成像时,将网络学习得到的成像矩阵h2、h3,迭代步长、正则化参数、迭代阈值作为固定值输入成像网络,成像过程就转化成一个网络的前馈运算,可以直接输出成像结果。
[0130]
在回波样本集构建完毕之后,通过设计损失函数实现非监督学习,对网络进行误差反向传播时,因为采用的是非监督学习,无法直接度量网络的输出与真实场景散射系数之间的差异,而是直接利用网络最后一层得到的场景散射系数估计值作用于m-1
,得到sar回波的估计值并与真实回波进行对比。其回波估计值表达式如式(17)所示,设定损失函数为均方误差函数(mean square error,mse),具体表达式如式(18)所示
[0131]
[0132][0133]
其中,表示第n个估计得到的大斜视sar回波,n为回波样本的序列号,其范围为n=1,2,...,n,式(17)得到的是估计的第n个大斜视sar回波。loss(ω)为可学习参数集ω的损失函数(可学习参数集ω通过步骤二中的step(2)获得)。这里的ω=arg min(loss(ω))是为了网络收敛之后得到比较精确的可学习参数集。
[0134]
实例:基于深度学习的sar大斜视高分辨成像算法仿真实验
[0135]
仿真实验:为了验证本发明方法的有效性,以点目标、真实场景目标为模型进行二维成像仿真,发射信号为线性调频信号,仿真对应的雷达参数以及网络参数如表1所示
[0136]
表1雷达参数和网络参数
[0137][0138]
仿真1:首先对噪声环境下的点目标成像性能进行验证。成像模式为条带模式,观测场景内包含有若干个个目标散射点。在生成训练样本和测试样本方面,通过加入随机加性高斯白噪声产生1000个回波样本,信噪比的范围为-15db~30db,并且随机选取样本数量的80%作为训练样本,20%作为测试样本。在训练阶段,对于网络参数的初始化,根据式(9)将成像矩阵h2和h3初始化,进一步得到θ0,对迭代参数初始化λ0=0.8、β0=0.8,t0=0.5,得到初始化参数集ω0。设定学习率为η=0.001、batch size设置为8,整个样本集的训练次数(epoch)设置为1000,训练样本n
train
=700。在测试阶段,测试样本为n
test
=100,对测试样本集取平均得到最终的成像结果。最终成像时,将网络学习得到的成像矩阵h2、h3,迭代步长、正则化参数、迭代阈值作为固定值输入成像网络,成像过程就转化成一个网络的前馈运算,可以直接输出成像结果。设定雷达工作在x波段(0.03m),点目标在距离向和方位向均相距30m,图6给出在斜视角45
°
、信噪比15db条件下,所提算法的点目标成像结果图。
[0139]
仿真2:为了验证方法的有效性,现对仿真一中的中心点目标在距离向和方位向分别取剖面分析所提方法的成像性能。图7以及表2给出不同算法成像性能的指标对比,可以看出所提方法的成像性能相比于其它算法得到明显的提高。
[0140]
表2成像质量评价指标结果对比
[0141][0142]
仿真3:为进一步验证所提方法的成像性能以及成像质量,现对radarsat-1的海面舰船目标进行仿真验证,图8给出实测场景在不同斜视角条件下的三种算法结果对比,可以看出,三种算法均能够对目标区域成像,但是所提方法得到的成像重构精度比起其它两种算法更高,背景噪声抑制效果更好。表3给出了三种算法海面舰船目标sar图像的图像熵对比,进一步验证了所提方法对于提升大斜视条件下的sar成像性能的有效性。
[0143]
表3海面舰船目标sar图像熵对比
[0144][0145]
本发明提出的基于深度展开网络学习的大斜视sar高分辨成像算法,该方法无需构造复杂的补偿函数、脉冲压缩函数,而是利用深层网络的方式迭代得到,对雷达性能的要求不高,从而降低了成像的成本。该方法可以在同一型号的星载sar或执行确定任务的机载sar,其雷达成像参数基本确定时,本发明方法能够实现快速精确成像。点目标和场景目标仿真结果表明,所提方法可以有效抑制旁瓣,提高成像精度和计算效率,满足sar在大斜视角下的成像要求。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。