1.本发明涉及油污处理领域,尤其是涉及用于海洋石油污染的快速回收装置。
背景技术:
2.海上石油业和石油工业的不断发展,接踵而来的海洋石油污染已经引起了世界各国的高度重视。海上溢油事故一旦发生,必须及时采取有效措施来清除海上溢油,否则会使自然环境和生态环境遭受灾难性的损失。现有的技术有:一是燃烧法,但燃烧法会造成起大范围的空气污染,对于海洋生物的破坏性也非常大。二是吸附法,布设围油栏将海洋的污染区域围起来,防止污染区域进一步扩大,利用吸油器和吸油毡清理油污,但是撇油器的效率较低,工序比较复杂,还会浪费大量的人力。三是使用化学试剂,但是化学试剂覆盖面积大较大,也可能造成二次污染,对海洋环境造成污染。为此我们提出用于海洋石油污染的快速回收装置用于解决上述问题。
3.中国专利文献cn210459147u记载了一种用于水面油污处理的无人船,包括船体、下料机构和回收机构,下料机构包括储料罐、四通阀和下料罐,下料罐包括第一下料罐、第二下料罐和第三下料罐,储料罐的底部连接有下料管路,下料管路连接四通阀,四通阀的另外三个接口分别连通第一支管路、第二支管路和第三支管路,第一支管路、第二支管路和第三支管路分别连通第一下料罐、第二下料罐和第三下料罐,回收机构包括连接杆、第一竖板、第二竖板、第一回收箱和第二回收箱,连接杆固定于船体顶端的中部,第一竖板和第二竖板分别垂直固定于连接杆的两端。本实用新型可快速吸附水面上的油污,吸附完成后可通过电磁铁回收纳米颗粒。但是该结构速度慢,效率低,吸附不净,造价较贵,回收机构不能进行上下调节,当无人船收集的油污变多后,船体受重力下沉,导致回收装置收集到大量的水,使用存在缺陷,需要改进。
技术实现要素:
4.本发明提供了用于海洋石油污染的快速回收装置,解决收集油污效率过低;收集油污仓内含有大量的乳层和水,不能同时实现收集油污和分离油污;无法自动调节收集深度的问题。
5.为解决上述技术问题,本发明所采用的技术方案是:用于海洋石油污染的快速回收装置,包括船体,船体与储油仓连接,船体通过升降机构与刮板连接,刮板倾斜布置,刮板的前端用于收集漂浮的油污,刮板的后端设有集油槽,集油槽通过油泵与储油仓连通。
6.优选的方案中,所述的升降机构包括两个相对船体上下滑动的浮筒,两个浮筒与刮板固定连接,浮筒与双向泵连接,双向泵用于控制浮筒内的水位,从而调节浮筒吃水深度。
7.优选的方案中,船体两侧设有集水槽,其中一个集水槽上设有双向泵,双向泵进口端与船体外的水面连接,双向泵的出口端与同侧的浮筒连通,两个浮筒通过管道连通,其中一个浮筒内设有液面感应器,浮筒与船体之间设有多个滑轨。
8.优选的方案中,所述的升降机构为电动推杆,船体为两个,船体与连接架固定连接,连接架通过转轴与刮板连接,刮板一端通过电动推杆与连接架连接,电动推杆用于调节刮板的倾角;连接架上设有多个插孔,刮板上设有转轴,转轴抵靠在插孔上。
9.优选的方案中,所述的升降机构为升降装置,升降装置包括支撑杆,支撑杆与船体固定连接,支撑杆内设有与支撑杆滑动的齿条,支撑杆上安装有电机,电机一端连接有齿轮,齿轮与齿条啮合,齿条与其中一个浮筒固定连接。
10.优选的方案中,船体上设有油泵,油泵的入口端与集油槽连通,油泵的出口端与储油仓连通,储油仓上设有油量检测装置,储油仓上设有多个破乳器;船体两侧设有电池,船体上设有单片机和控制装置。
11.优选的方案中,储油仓上设有多个溢流槽,储油仓上还设有多个溢流装置,溢流槽一端与储油仓连通,溢流槽另一端与溢流装置连通,溢流槽顶部的高度低于储油仓顶部的高度,溢流装置一端连通到船体外。
12.优选的方案中,船体上设有第一拉线传感器和第二拉线传感器,第一拉线传感器底部连接有第一浮球,第二拉线传感器底部连接有第二浮球;第一浮球密度小于油的密度;第二浮球密度大于油的密度并且小于水的密度。
13.优选的方案中,刮板底部设有油水界面检测装置,油水界面检测装置包括第三浮球,第三浮球内部设有磁铁,第三浮球与磁致伸缩液位计的杆滑动连接;第三浮球密度大于油的密度并且小于水的密度。
14.优选的方案中,船体上设有立柱,立柱上设有滑动的安装板,安装板一端与电动推杆的伸缩杆固定连接,电动推杆安装在船体上,安装板另一端与滑杆的一端连接,滑杆的另一端设有磁式传感器,磁式传感器包括第三浮球,浮球上设有沿立杆滑动的环状磁铁,立杆上设有磁簧开关;第三浮球的密度大于油的密度并且小于水的密度;当第三浮球位于油中时,磁簧开关断开,磁式传感器处于常开;当第三浮球位于水中时,磁簧开关闭合,磁式传感器处于常闭。
15.本发明的有益效果为:破乳器通过比重调节,悬浮在乳层内,使乳层分离成油和水。将乳层打破成油和水,从而解决市面上只能收集油层的问题。由于比重不同,水沉淀在储油仓的底部。必要的话在储舱内设置斜板辅助沉淀。通过溢流装置流出船体。
16.优选方案中,采用浮筒与船体互相独立的结构时,船体的吃水深度不会影响浮筒的吃水深度,通过双向泵对浮筒内抽水或排水控制浮筒的水位,以使刮板自动调节油污的高度,使刮板能够精准的调节到水和乳液之间,避免储油仓收集到过多的水。在浮筒内的液面感应器用于反馈浮筒内水位。刮板通过自动化控制,可高效率的将水中的油和乳刮起,清洁力度高。同时浮筒内有液位传感器,双向泵与浮筒相连,智能速控调节浮筒内水位,从而调节刮板高度。
17.优选方案中,采用双船体结构时,整体结构具有较高的稳定性。在油污收集的路径规划中,需要船体结构有较小的转弯半径,以执行“s”形智能路径规划方案。双体船的两个螺旋桨通过同时正反转,能够确保非常小的转弯半径。
18.刮板相对于水面倾斜,刮板的迎水端较低,而背水端较高,刮板一侧与集油槽连接,以使刮板的迎水端在油污内的时候,船体以较低的运行速度,油污也能冲上刮板进入到集油槽内。
19.溢流装置与一个溢流槽连接,溢流槽的顶部溢流位置低于储油仓的顶部。水在重力作用下从溢流槽的顶部溢流排出,直到储舱内的油污装满,大量降低储油仓内夹杂的水的含量,有效减少了油污收集后期对油污除水的工序,提高整体结构的收集油污的效率。
20.油量检测装置能够自动检测能够检测储油仓油液深度,当油满后将信号传递给船体,船体自动返航,卸载油污后再次开始收集油污。船体上的控制装置能够远程遥控,通过gps、北斗定位或者无线定位锚点的三角形定位,控制船体沿着路径行走实现智能巡航。
21.优选方案中,采用第一拉线传感器和第二拉线传感器时,第一拉线传感器监测到船体相对于油面的位置,第二拉线传感器监测到船体相对于水面的位置。同时能够检测到油污的厚度和油污距离船体的高度。方便工作人员调节刮板的高度,以使倾斜刮板的底部在油水分界面,这样既能确保除油污干净,也能尽量避免过多的水被倾斜刮板收集到集油槽中,从而大幅度提高了处理油污的效率。
22.优选方案中,采用油水界面检测装置,只能指示油层和乳层的厚度,根据乳层与水的分界面的位置,智能化的调整刮板的迎水端在油污内的深度,这样能够进一步提高油污的采集效率。
23.优选方案中,当磁式传感器进入到油体层时,磁式传感器的第三浮球处于下落状态,磁簧开关断开,磁式传感器常开。当磁式传感器进入到水体层时,第三浮球处于上升状态,磁簧开关闭合,磁簧开关常闭。磁式传感器由常开变成常闭,这时电动推杆推动安装板的行程即为油的厚度。
24.把储油仓是空仓时立柱作为基准位置,测空仓油体层厚度时,滑杆顶部相对于基准位置有一个行程m1,当储油仓储存一定量的油液时,驱动磁式传感器测油体层与水体层的位置,磁式传感器由常开变成常闭,记录下滑杆顶部相对于基准位置有一个行程m2,此时船体的吃水深度为m1
‑ꢀ
m2。由此结构,利用磁式传感器、立柱、电动推杆安装板和滑杆,既能测量油体层厚度,又能随时测量船体的吃水深度,一物多用,能够大量推广。
25.整体装置油污收集效率极高,经过测算相同能耗下,收集效率可以达到撇油器的5~10倍。能够根据用户需求实现手动远程遥控或者全智能控制,大幅减少人工投入,降低劳动强度,提高收集效率。本装置的结构非常简单,制造方便,性价比高,适于实施转化和推广。由于本装置的成本低、效率高、智能化程度高,可以预期的经济效益前景非常可观。
附图说明
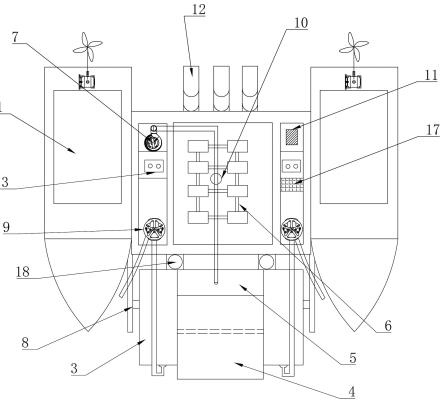
26.下面结合附图和实施例对本发明作进一步说明:图1是本发明整体结构的俯视示意图;图2是本发明局部结构的俯视示意图;图3是本发明溢流装置与储油仓的连接示意图;图4是本发明刮板和集油槽连接的示意图;图5是本发明采用第一拉线传感器和第二拉线传感器时的正视示意图;图6是本发明采用油水界面检测装置时的正视示意图;
图7是本发明升降装置的左侧视图;图8是本发明局部结构的左侧视图;图9是本发明磁式传感器常开是的示意图;图10是本发明磁式传感器常闭是的示意图;图11是本发明电动推杆连接刮板时的俯视图;图12是本发明电动推杆连接刮板时的侧视图;图中:船体1;储油仓101;集水槽102;溢流槽103;液面感应器2;浮筒3;刮板4;集油槽5;破乳器6;油泵7;升降装置8;支撑杆801;齿条802;齿轮803;电机804;双向泵9;油量检测装置10;单片机11;溢流装置12;电池13;第一拉线传感器14;第一浮球1401;第二拉线传感器15;第二浮球1501;油水界面检测装置16;第三浮球1601;控制装置17;滑轨18;立柱19;第一电动推杆20;安装板21;滑杆22;磁式传感器23;第三浮球2301;磁簧开关2302;环状磁铁2303;立杆2304;连接架24;插孔2401;转轴25;第二电动推杆26。
具体实施方式
27.实施例1:如图1-12中,用于海洋石油污染的快速回收装置,包括船体1,船体1与储油仓101连接,船体1通过升降机构与刮板4连接,刮板4倾斜布置,刮板4的前端用于收集漂浮的油污,刮板4的后端设有集油槽5,集油槽5通过油泵7与储油仓101连通。由此结构,在浮筒3内的液面感应器2用于反馈浮筒3内水位。刮板4相对于水面倾斜,刮板4的迎水端较低,而背水端较高,刮板4一侧与集油槽5连接,以使刮板4的迎水端在油污内的时候,船体1以较低的运行速度,油污也能冲上刮板进入到集油槽内。储油仓101上的溢流装置12与一个溢流槽103连接,溢流槽103的顶部溢流位置低于储油仓101的顶部。当储油仓101储存的油足够多,水在重力作用下从溢流槽的顶部溢流排出,直到储舱内的油污装满。储油仓101内的破乳器6促进油水分离,水在重力作用下,从溢流槽103排出。
28.储油仓101内的油量检测装置10能够自动检测能够检测储油仓101油液深度,用于海洋石油污染的快速回收装置满后返航,卸载油污后再次开始收集油污。船体1上的控制装置17能够远程遥控,通过gps、北斗定位或者无线定位锚点的三角形定位,控制船体1沿着路径行走实现智能巡航。
29.整体装置油污收集效率极高,经过测算相同能耗下,收集效率可以达到撇油器的5~10倍。能够根据用户需求实现手动远程遥控或者全智能控制,大幅减少人工投入,降低劳动强度,提高收集效率。本装置的结构非常简单,制造方便,性价比高,适于实施转化和推广。由于本装置的成本低、效率高、智能化程度高,可以预期的经济效益前景非常可观。
30.优选的方案中,所述的升降机构包括两个相对船体1上下滑动的浮筒3,两个浮筒3与刮板4固定连接,浮筒3与双向泵9连接,双向泵9用于控制浮筒3内的水位,从而调节浮筒3吃水深度。由此结构,通过双向泵9对浮筒3内抽水或排水控制浮筒的水位,以使刮板4自动调节油污的高度,使刮板4能够精准的调节到水和乳液之间,避免储油仓101收集到过多的水。
31.优选的方案中,船体1两侧设有集水槽102,其中一个集水槽102上设有双向泵9,双向泵9进口端与船体1外的水面连接,双向泵9的出口端与同侧的浮筒3连通,两个浮筒3通过
管道连通,其中一个浮筒3内设有液面感应器2,浮筒3与船体1之间设有多个滑轨18。由此结构,在浮筒3内的液面感应器2用于反馈浮筒3内水位。刮板4相对于水面倾斜,刮板4的迎水端较低,而背水端较高,刮板4一侧与集油槽5连接,以使刮板4的迎水端在油污内的时候,船体1以较低的运行速度,油污也能冲上刮板进入到集油槽内。
32.集水槽102与同侧的浮筒3连通,通过双向泵9向浮筒3内抽水或排水控制浮筒的水位,以使刮板4自动调节油污的高度,在浮筒3内的液面感应器2用于反馈浮筒3内水位。两个双向泵9能够使浮筒3内抽水或排水速度更快,加快刮板4高度调节的速度,从而加快油污收集速度。
33.两个浮筒3之间靠近底部的位置设置了连通管,以使两个浮筒3之间的水位平衡。这样仅需一个双向泵9即可调节两个浮筒3的吃水深度,进而调整刮板4的迎水端伸入到油污内的深度。结构非常简单,制造方便,节约成本,减少设备,免去设备的重量能够收集更多的油污。
34.优选的方案中,所述的升降机构为第二第二电动推杆26,船体1为两个,船体1与连接架24固定连接,连接架24通过转轴25与刮板4连接,刮板4一端通过第二第二电动推杆26与连接架24连接,电动推杆用于调节刮板4的倾角;连接架24上设有多个插孔2401,刮板4上设有转轴25,转轴25抵靠在插孔2401上。由此结构,驱动第二第二电动推杆26,能够精确调节刮板4相对于油面的角度,通过把转轴25插入不同高度的插孔2401内,能够调节刮板4相对于连接架24的高度,以使调节刮板4相对于油面的高度。
35.优选的方案中,所述的升降机构为升降装置8,升降装置8包括支撑杆801,支撑杆801与船体1固定连接,支撑杆801内设有与支撑杆801滑动的齿条802,支撑杆801上安装有电机804,电机804一端连接有齿轮803,齿轮803与齿条802啮合,齿条802与其中一个浮筒3固定连接。由此结构,船体1的动作可以通过控制装置17远程遥控实现,目前已经能够实现800米范围的远程遥控。实现智能巡航的步骤是:确定围栏的范围,并映射为坐标,根据刮板4宽度给船体1设置巡航路径,将巡航路径转换为各个连续的坐标点。通过gps、北斗定位或者无线定位锚点的三角形定位,控制船体沿着路径行走实现智能巡航。无线定位锚点是指现场设置的多个无线标引装置,通过三角形定位检测船体在坐标内的位置,从而控制船体沿着即定路径巡航。
36.优选的方案中,船体1上设有油泵7,油泵7的入口端与集油槽5连通,油泵7的出口端与储油仓101连通,储油仓101上设有油量检测装置10,储油仓101上设有多个破乳器6;船体1两侧设有电池13,船体1上设有单片机11和控制装置17。由此结构,通过油泵7把集油槽5收集到的油污运送到储油仓101内,油量检测装置10能够自动检测能够检测储油仓101油液深度,用于海洋石油污染的快速回收装置满后返航,卸载油污后再次开始收集油污。破乳器6通过比重调节,悬浮在乳层内,使乳层分离成油和水。将乳层打破成油和水,从而解决市面上只能收集油层的问题。由于比重不同,水沉淀在储油仓101的底部。必要的话在储舱内设置斜板辅助沉淀。通过溢流装置12流出船体1。
37.优选的方案中,储油仓101上设有多个溢流槽103,储油仓101上还设有多个溢流装置12,溢流槽103一端与储油仓101连通,溢流槽103另一端与溢流装置12连通,溢流槽103顶部的高度低于储油仓101顶部的高度,溢流装置12一端连通到船体1外。由此结构,储油仓
101上的溢流装置12与一个溢流槽103连接,溢流槽103的顶部溢流位置低于储油仓101的顶部。当储油仓101储存的油足够多,水在重力作用下从溢流槽的顶部溢流排出,直到储舱内的油污装满。储油仓101内的破乳器6促进油水分离,水在重力作用下,从溢流槽103排出。
38.优选的方案中,船体1上设有第一拉线传感器14和第二拉线传感器15,第一拉线传感器14底部连接有第一浮球1401,第二拉线传感器15底部连接有第二浮球1501;第一浮球1401密度小于油的密度;第二浮球1501密度大于油的密度并且小于水的密度。由此结构,第一浮球1401浮于油面上方,第一拉线传感器14通过第一浮球1401的位置监测到船体1相对于油面的位置,第二浮球1501浮于水面上方,而沉在油面下方,第二拉线传感器15通过第二浮球1501的位置监测到船体1相对于水面的位置。通过第一拉线传感器14和第二拉线传感器15监测到的数据,能够检测到油污的厚度,方便工作人员调节刮板4的高度,以使倾斜刮板4的底部在油水分界面,这样既能确保除油污干净,也能尽量避免过多的水被倾斜刮板4收集到集油槽5中,从而大幅度提高了处理油污的效率。同时通过第一拉线传感器14和第二拉线传感器15,能够检测到油污距离船体1的高度。
39.优选的方案中,刮板4底部设有油水界面检测装置16,油水界面检测装置16包括第三浮球1601,第三浮球1601内部设有磁铁,第三浮球1601与磁致伸缩液位计的杆滑动连接;第三浮球1601密度大于油的密度并且小于水的密度。由此结构,油水界面检测装置16是一个磁致伸缩液位计,通过精确第三浮球1601的比重,例如增加配重,使第三浮球1601正好停在乳层与水的分界面的位置,从而指示油层和乳层的厚度,根据乳层与水的分界面的位置,智能化的调整刮板的迎水端在油污内的深度,这样能够进一步提高油污的采集效率。
40.优选的方案中,船体1上设有立柱19,立柱19上设有滑动的安装板21,安装板21一端与第一电动推杆20的伸缩杆固定连接,第一电动推杆20安装在船体1上,安装板21另一端与滑杆22的一端连接,滑杆22的另一端设有磁式传感器23,磁式传感器23包括第三浮球2301,浮球2301上设有沿立杆2304滑动的环状磁铁2303,立杆2304上设有磁簧开关2302;第三浮球2301的密度大于油的密度并且小于水的密度;当第三浮球2301位于油中时,磁簧开关2302断开,磁式传感器23处于常开;当第三浮球2301位于水中时,磁簧开关2302闭合,磁式传感器23处于常闭。由此结构,立柱19上设有沿立柱19滑动的滑杆22,驱动第一电动推杆20,磁式传感器23在油和水的液体中上下移动。
41.当船体1中储油仓101是空仓时,驱动第一电动推杆20,以使磁式传感器23从油面上方缓慢下移,当磁式传感器23进入到油体层时,磁式传感器23的第三浮球1601处于下落状态,磁簧开关2302断开,磁式传感器23常开。当磁式传感器23进入到水体层时,第三浮球1601处于上升状态,磁簧开关2302闭合,磁簧开关2302常闭。磁式传感器23由常开变成常闭,这时第一电动推杆20推动安装板21的行程即为油的厚度。
42.把储油仓101是空仓时立柱19作为基准位置,测空仓油体层厚度时,滑杆22顶部相对于基准位置有一个行程m1,当储油仓101储存一定量的油液时,驱动磁式传感器23测油体层与水体层的位置,磁式传感器23由常开变成常闭,记录下滑杆22顶部相对于基准位置有一个行程m2,此时船体1的吃水深度为m1
‑ꢀ
m2。由此结构,利用磁式传感器23、立柱19、第一
电动推杆20安装板21和滑杆22,既能测量油体层厚度,又能随时测量船体1的吃水深度,一物多用,能够大量推广。
43.实施例2:结合实施例1进一步说明:当船体1为单船结构时,船体1结构简单,整体装置投入少,成本低,行动方便。
44.当船体1为双船结构时,双船之间固定连接,整体结构不易侧翻,在海洋中时常会有较大风浪,需要船体1具有较高的稳定性。在油污收集的路径规划中,需要船体1结构有较小的转弯半径,以执行“s”形智能路径规划方案。双体船的两个螺旋桨通过同时正反转,能够确保非常小的转弯半径。
45.上述的实施案例仅为本发明的优选技术方案,而不应视为对于本发明的限制,本发明的保护范围应以权利要求记载的技术方案,包括权利要求记载的技术方案中技术特征的等同替换方案为保护范围。即在此范围内的等同替换改进,也在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。