1.本发明涉及一种变轨控制系统及救援起重机,属于铁路应急救援技术领域。
背景技术:
2.中国高速铁路发展成就举世共睹,但处理高速铁路突发事件的救援设备发展滞后,目前尚未有公铁两用起重机能满足高速铁路应急救援的需求,仅依靠老式的铁路起重机或公路起重机。铁路救援起重机沿事发线路到达事发地点后,由于线路被事发车辆占据,通常面临变轨后到相邻线路实施起吊作业对倾翻车辆进行复位,目前尚未有相关救援车辆在不借助外部起重装置的情况下实现跨线变轨的功能。
技术实现要素:
3.本发明的目的在于克服现有技术中的不足,提供一种变轨控制系统及救援起重机,能保证变轨过程中整车车身前后移动速度一致,防止变轨过程中支腿结构变形。
4.为达到上述目的,本发明是采用下述技术方案实现的:
5.第一方面,本发明提供了一种变轨控制系统,包括:
6.液压泵:连接液压油箱和控制阀总成,将液压油泵送至控制阀总成;
7.控制阀总成:连接水平油缸和液压泵,通过控制各水平油缸油路的通断控制水平油缸动作,以及,通过回油油路连接液压油箱;
8.水平油缸:通过机械销轴与上车车身和垂直支撑连接,通过回油油路连接液压油箱;
9.变量机构:连接于液压泵和控制阀总成之间的负载反馈回路,通过调节液压泵的排量为水平油缸动作提供所需液压油流量;
10.溢流阀:连接液压泵和液压油箱,当液压系统压力超过其设定压力值时,所述溢流阀打开,液压泵出口液压油经溢流阀回液压油箱;
11.二通流量阀:一端连接负载反馈回路,另一端连接液压油箱;
12.第一单向阀:一端连接回油油路,另一端连接液压油箱,保持控制阀总成回油压力维持在第一单向阀设定值。
13.进一步的,所述控制阀总成包括换节阀、定压差阀、第二单向阀和二次溢流阀,其中:所述定压差阀一端连接换节阀出口、另一端连接水平油缸,所述第二单向阀一端接回油油路、另一端接水平油缸有杆腔,所述二次溢流阀一端接回油油路、另一端接水平油缸无杆腔。
14.进一步的,所述换节阀为电比例阀,且通过两个比例电磁铁分别控制换节阀阀芯处于上位或者下位,所述换节阀的通流面积a与电磁铁的电流大小成正比;不通电时,换节阀处于中位,液压泵泵出的液压油在此处截止;当换节阀处于上位时,液压油经换节阀、定压差阀至水平油缸有杆腔,水平油缸缩回;当换节阀处于下位时,液压油经换节阀、定压差阀至水平油缸无杆腔,水平油缸伸出。
15.进一步的,当换节阀通电时,所述定压差阀与液压泵出口液压油路接通,液压油推动定压差阀阀芯至上位接通,液压油经上位节流口进入所述负载反馈油路,负载反馈油路分成两路,一路进入变量机构右腔,一路作用于定压差阀下腔,定压差阀使换节阀前后的压差
△
p保持为一恒定值,通过换节阀的流量与通过换节阀的电流大小成正比。
16.进一步的,所述换节阀阀芯处于上位最大行程时,通流面积为a
max
,处于下位最大行程时,通流面积为2a
max
,即阀芯上位通过的最大流量qb是下位最大流量qa的1/2,即qb=qa/2,所述水平油缸的无杆腔面积为s0,有杆腔面积为s0/2。
17.进一步的,当水平油缸有杆腔压力高于回油压力时,所述第二单向阀关闭,当水平油缸有杆腔压力低于回油压力时,所述第二单向阀开启。
18.进一步的,当水平油缸无杆腔压力高于二次溢流阀设定压力值时,所述二次溢流阀打开,无杆腔液压油接通回油回路回油箱,当无杆腔压力低于回油压力时,所述单向阀开启,所述回油油路液压油流入水平油缸无杆腔。
19.进一步的,所述控制阀总成包括左前控制阀总成、左后控制阀总成、右前控制阀总成和右后控制阀总成,分别控制左前水平油缸、左后水平油缸、右前水平油缸和右后水平油缸伸出或缩回。
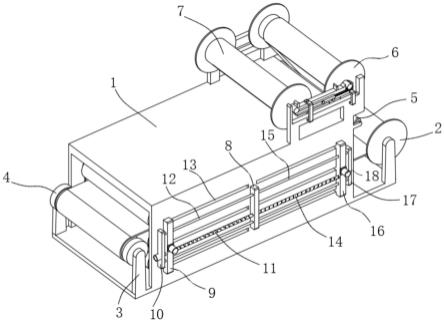
20.第二方面,本发明提供了一种救援起重机,所述救援起重机包括控制器和上述的一种变轨控制系统,所述控制器接收信号后转化成电流信号,并输出至控制控制阀总成控制水平油缸动作,进而推动水平支撑伸缩动作,所述水平支撑的尾部设置有垂直支撑,所述垂直支撑能够通过内部油缸接触位于地面的支撑板,使上车轨道轮完全离开轨道一段距离。
21.进一步的,所述水平支撑处安装有位移传感器,且位移传感器能够将位移信号反馈至控制器,所述控制器通过位移传感器形成的闭环控制对控制阀总成的电流信号进行调整。
22.与现有技术相比,本发明所达到的有益效果:
23.本发明通过提供一种变轨控制系统及救援起重机,在不借助外部起重装置的前提下,通过救援起重机本身的电液控制系统和机械结构,实现救援起重机变轨作业。在变轨作业过程中,实现上车前后移动速度一致,防止在变轨过程中支撑结构变形,对车体产生损伤。
附图说明
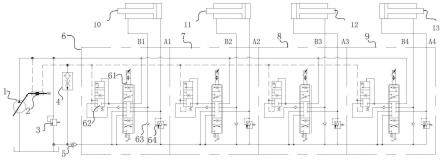
24.图1是本发明实施例一提供的一种变轨控制系统液压原理图;
25.图2是本发明实施例二提供的一种变轨救援起重机作业俯视图;
26.图3是本发明实施例二提供的一种变轨救援起重机作业车尾部视图。
27.图中:1、液压泵;2、变量机构;3、溢流阀;4、二通流量阀;5、第一单向阀;6、左前控制阀总成;7、左后控制阀总成;8、右前控制阀总成;9、右后控制阀总成;61、换节阀;62、定压差阀;63、第二单向阀;64、二次溢流阀;10、左前水平油缸;11、左后水平油缸;12、右前水平油缸;13、右后水平油缸。
具体实施方式
28.下面结合附图对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
29.实施例一:
30.本发明提供一种变轨控制系统,主要包括:液压泵1、变量机构2、溢流阀3、二通流量阀4、第一单向阀5和控制阀总成,其中控制阀总成包括左前控制阀总成6、左后控制阀总成7、右前控制阀总成8和右后控制阀总成9。
31.液压泵1从液压油箱吸油,将液压油泵送至控制阀总成,控制阀总成分别控制通往各水平油缸油路的通断,液压泵1的排量通过变量机构2调节,从而为系统所有水平油缸动作提供所需液压油流量。
32.控制阀总成均由完全相同的换节阀61、定压差阀62、第二单向阀63和二次溢流阀64组成。其中,换节阀61为电比例阀,通常由两个比例电磁铁分别控制换节阀61阀芯处于上位或者下位,换节阀61的通流面积a与电磁铁的电流大小成正比。不通电时,换节阀61处于中位,液压泵1泵出的液压油在此处截止;当换节阀61处于上位时,液压油经换节阀61、定压差阀62至水平油缸有杆腔,水平油缸缩回;当换节阀61处于下位时,液压油经换节阀61、定压差阀62至水平油缸无杆腔,水平油缸伸出。控制阀总成控制左前水平油缸10、左后水平油缸11、右前水平油缸12、右后水平油缸13伸出或缩回。
33.定压差阀62一端连接换节阀61出口,一端连接各水平油缸无杆腔或有杆腔。当换节阀61通电时,定压差阀62与液压泵1出口液压油路接通,液压油推动定压差阀62阀芯至上位接通,液压油经上位节流口进入负载反馈油路,负载反馈油路分成两路,一路进入变量机构2右腔,一路作用于定压差阀62下腔。定压差阀62使换节阀61前后的压差
△
p保持为一恒定值,通过换节阀61的流量与负载压力无关,仅与换节阀61通流面积a有关,即与通过换节阀61的电流大小成正比。换节阀61阀芯处于上位最大行程时,通流面积为a
max
,处于下位最大行程时,通流面积为2a
max
,即阀芯上位通过的最大流量qb是下位最大流量qa的1/2,即qb=qa/2。
34.第二单向阀63一端接回油油路,一端接水平油缸有杆腔。当水平油缸有杆腔压力高于回油压力时,第二单向阀63关闭;当水平油缸有杆腔压力低于回油压力时,第二单向阀63开启,回油油路液压油流入各水平油缸有杆腔,防止有杆腔吸空。
35.二次溢流阀64一端接回油油路,一端接水平油缸无杆腔。当水平油缸无杆腔压力高于二次溢流阀设定压力值时,二次溢流阀打开,无杆腔液压油接通回油回路回油箱,防止油缸推力过大造成缸杆弯曲变形或与油缸连接的机械装置损坏。当无杆腔压力低于回油压力时,单向阀开启,回油油路液压油流入水平油缸无杆腔,防止无杆腔吸空。
36.第一单向阀5一端连接控制阀总成回油油路,一端连接液压油箱,保持控制阀总成回油压力维持在第一单向阀5设定值,防止各水平油缸运动过程中有杆腔或无杆腔吸空。
37.左前水平油缸10、左后水平油缸11、右前水平油缸12、右前水平油缸13分别通过机械销轴与上车车身和垂直支撑连接,各水平油缸的无杆腔面积为s0,有杆腔面积为s0/2,即无杆腔面积是有杆腔面积的2倍。
38.二通流量阀4一端连接负载反馈回路,一端连接液压油箱,当任意控制阀总成通电时,负载反馈油路有持续的小流量液压油通过二通流量阀阀4回油箱,保证定压差阀62正常
工作。
39.溢流阀3为系统安全阀,当液压系统压力超过其设定压力值时,溢流阀3打开,液压泵出口液压油经溢流阀3回液压油箱,防止系统压力过高对液压元件造成损伤。
40.实施例二:
41.一种救援起重机,包括控制器和如实施例一所述的一种变轨控制系统,变轨工作过程如下:
42.救援起重机沿轨道a运行至需要变轨位置停车,操纵遥控手柄,控制器接收到右水平支撑伸出输入信号,并根据手柄信号大小转化成电流信号输出,控制右前控制阀总成8和右后控制阀总成9下位接通,液压油进入右前水平油缸12、右后水平油缸13无杆腔,油缸伸长,推动右前和右后水平支撑外伸至轨道b右侧,并保持右前水平支撑和右后水平支撑伸出长度相等。操控遥控器手柄,使水平支撑尾部的垂直支撑内部油缸外伸,垂直支撑接触位于地面的支撑板,直至使上车轨道轮依靠四处垂直支撑完全离开轨道一段距离,调整垂直支撑的高度使上车车身处于水平状态,此时将垂直支撑、支撑板与路基固定。操作遥控器一键水平右移按钮,控制器接收一键水平右移输入信号,同时向控制阀总成发出控制信号,使左前控制阀总成6和左后控制阀总成7下位接通且阀芯处于下位最大行程,左前水平油缸10和左后水平油缸11无杆腔以流量qa进油,左前水平油缸10和左后水平油缸11伸出,同时使右前控制阀总成8和右后控制阀总成9上位接通且阀芯处于上位最大行程,右前水平油缸12和右后水平油缸13有杆腔以流量qb进油,右前水平油缸12和右后水平油缸13缩回。在垂直支腿固定的情况下,左前水平油缸10和左后水平油缸11伸出时将推动上车车身右移,同时右前水平油缸12和右后水平油缸13缩回也将拉动上车车身右移。左前水平油缸10和左后水平油缸11伸出的速度v
左
=qa/s0,右前水平油缸12和右后水平油缸13缩回的速度v
右
=qb/(s0/2)=2qb/s0=qa/s0=v
左
(qb=qa/2),且v
左
、v
右
均与负载无关,即与水平支撑和上车车身之间的摩擦力无关。由此可知,水平油缸的运动速度完全同步,避免了车身因前、后、左、右移速度不一致导致产生内力以致车体结构变形。当轨道轮移动到轨道b的垂直正上方时,操作遥控器一键停止按钮,控制器接收一键停止输入信号,同时切断全部控制阀总成的控制电流,上车车身停止右移。操控遥控器手柄,使水平支撑尾部的垂直支撑内部油缸均匀缩回,当轨道轮接触轨道b后,继续是垂直支撑回收到位。然后操控遥控器一键收车按钮,控制器接收信号后,同时向所有控制阀总成发出控制信号,使所有控制阀支总成上位接通,控制各油缸缩回,使救援起重机具备铁路行驶状态,完成变轨作业。
43.上述变轨控制过程,在每个水平支撑增加位移传感器的情况下,更容易监控上车车身前、后、左、右移动距离是否相等,通过控制控制阀总成的电流信号进行调整,实现闭环控制,其控制精度更高,而且平移过程中能够精准控制停止位置。
44.本领域内的技术人员应明白,本技术的实施例可提供为方法、系统、或计算机程序产品。因此,本技术可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本技术可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。
45.本技术是参照根据本技术实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流
程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
46.这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
47.这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
48.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。