1.本发明属于园林绿化技术领域,尤其涉及基于园林绿化树木果实收集结构及其安装方法。
背景技术:
2.园林绿化中有许多树木在相应季节会结成果实,如果放任果实散落不进行处理的话不仅影响美观还会腐败并招引动物和昆虫,所以需要对果实进行收集和处理,现有技术存在的问题是:现有的收集方式大多数依靠人工采摘或放置收集装置等待果实自然掉落,但是人工采摘不仅效率低下并且存在一定的安全隐患,采摘过程较为繁琐,而现有收集装置不能将果实和树叶杂物分选,收集后还需要对树叶杂物等挑选出去,并且掉落过程容易有果实滚落至收集范围外,较为不便。
技术实现要素:
3.针对现有技术存在的问题,本发明提供了基于园林绿化树木果实收集结构及其安装方法,具备将杂物和果实分选和收集完整的优点,解决了现有的收集方式大多数依靠人工采摘或放置收集装置等待果实自然掉落,但是人工采摘不仅效率低下并且存在一定的安全隐患,采摘过程较为繁琐,而现有收集装置不能将果实和树叶杂物分选,收集后还需要对树叶杂物等挑选出去,并且掉落过程容易有果实滚落至收集范围外,较为不便的问题。
4.本发明是这样实现的,基于园林绿化树木果实收集结构及其安装方法,包括第一支撑罩、第二支撑罩、收集箱、分筛板、两个密封板和两个导向板,所述第二支撑罩位于第一支撑罩的右侧,所述收集箱位于第一支撑罩的底部,所述分筛板位于收集箱的内腔,所述密封板位于第一支撑罩和第二支撑罩内腔的底部,所述导向板位于第一支撑罩和第二支撑罩内腔的顶部,所述第一支撑罩和第二支撑罩的内腔均固定连接有回旋盘,所述第一支撑罩通过合页与第二支撑罩活动连接,所述第一支撑罩和第二支撑罩的内腔均设置有螺旋导轨,所述第一支撑罩和第二支撑罩的前侧均固定连接有限位块,所述限位块的前侧开设有限位孔,所述限位块的前侧设置有连接杆,所述连接杆后侧的两侧均固定连接有限位杆,所述限位杆的后侧穿过限位孔并延伸至限位块的内腔,所述限位块的内腔设置有与限位杆配合使用的固定机构,所述限位块的前侧设置有与固定机构配合使用的传动机构。
5.作为本发明优选的,所述固定机构包括安装杆,所述安装杆远离限位杆的一侧固定连接有与传动机构配合使用的安装板,所述安装板远离安装杆一侧的顶部和底部均固定连接有弹簧,两个安装板相对的一侧设置有配合块,所述安装板靠近配合块的一侧固定连接有配合杆,所述配合杆靠近配合块的一侧延伸至配合块的内腔。
6.作为本发明优选的,所述传动机构包括拉杆,所述拉杆的后侧延伸至限位块的内腔并固定连接有活动杆,所述活动杆顶部的两侧均设置有转盘,两个转盘相对的一侧均固定连接有与活动杆配合使用的活动块。
7.作为本发明优选的,所述分筛板靠近收集箱内壁的一侧与收集箱的内壁固定连
接,所述密封板和导向板靠近第一支撑罩和第二支撑罩内壁的一侧与第一支撑罩的内壁和第二支撑罩的内壁接触固定连接。
8.作为本发明优选的,所述导向板的表面开设有进料孔,所述进料孔的数量为若干个,且环形分布于导向板的表面,所述回旋盘的底部开设有导向孔,所述导向孔的内腔设置有导向管。
9.作为本发明优选的,所述导向管靠近导向孔内壁的一侧与导向孔的内壁接触,所述导向管的底部延伸至回旋盘的底部,所述限位杆靠近限位孔内壁的一侧与限位孔的内壁接触,所述限位杆的表面开设有与安装杆配合使用的固定槽。
10.作为本发明优选的,所述第一支撑罩和第二支撑罩相反的一侧均开设有排渣孔,所述第一支撑罩和第二支撑罩相对的一侧均固定连接有对接块,所述螺旋导轨的底部固定连通有排料管。
11.作为本发明优选的,所述安装杆靠近固定槽内壁的一侧与固定槽的内壁接触,所述弹簧远离安装板的一侧与限位块的内壁固定连接,所述配合块的后侧与限位块的内壁固定连接。
12.作为本发明优选的,所述活动杆的顶部与活动块接触,所述转盘靠近安装板的一侧与安装板接触,所述转盘的后侧通过转轴与限位块的内壁活动连接。
13.作为本发明优选的,第一步:将第一支撑罩和第二支撑罩放置在树木两边,然后将第一支撑罩和第二支撑罩向内合拢,第一支撑罩和第二支撑罩通过合页转动,第一支撑罩和第二支撑罩带动密封板、导向板、回旋盘和螺旋导轨转动并使其相互对接,对接块与树木接触,将收集箱放置在排料管的底部;
14.第二步:拉动拉杆,拉杆带动活动杆向上移动,活动杆对活动块进行挤压,活动块受力后带动转盘转动,转盘旋转后对安装板进行挤压,安装板带动安装杆和配合杆移动并对弹簧进行挤压,配合杆在配合块的内腔滑动,然后将连接杆放置在限位块的前侧并向后推动,连接杆带动限位杆移动,限位杆穿过限位孔进入限位块的内腔,然后松开拉杆,弹簧压缩后释放的力使安装杆复位,安装杆进入固定槽的内腔,完成安装;
15.第三步;当树木的果实向下掉落时,果实首先掉落在导向板的表面,导向板表面的弧度会将果实导向至进料孔的方向,果实通过进料孔进入回旋盘的内腔,然后通过回旋盘中进料孔内的导向孔进入螺旋导轨的内腔,螺旋导轨将果实导向导向管的方向,导向管将果实输送至收集箱的内腔,果实进入收集箱的内腔,果实掉落至收集箱内分筛板的表面,分筛板将树叶、杂物和果实分选,完成果实收集。
16.与现有技术相比,本发明的有益效果如下:
17.1、本发明通过设置第一支撑罩、第二支撑罩、密封板、导向板、回旋盘、螺旋导轨、对接块、收集箱、固定机构、限位杆、连接杆和限位块的配合使用,将第一支撑罩和第二支撑罩放置在树木两边,然后将第一支撑罩和第二支撑罩向内合拢,第一支撑罩和第二支撑罩通过合页转动,第一支撑罩和第二支撑罩带动密封板、导向板、回旋盘和螺旋导轨转动并使其相互对接,对接块与树木接触,将收集箱放置在排料管的底部,然后通过固定机构、限位杆和连接杆对限位块进行限位,解决了现有的收集方式大多数依靠人工采摘或放置收集装置等待果实自然掉落,但是人工采摘不仅效率低下并且存在一定的安全隐患,采摘过程较为繁琐,而现有收集装置不能将果实和树叶杂物分选,收集后还需要对树叶杂物等挑选出
去,并且掉落过程容易有果实滚落至收集范围外,较为不便的问题,该基于园林绿化树木果实收集结构及其安装方法,值得推广。
18.2、本发明通过设置固定机构,可以对限位杆的位置进行固定和限位,防止限位杆移动影响对连接杆的定位能力。
19.3、本发明通过设置传动机构,可以对安装板的位置进行调节,方便使用者使用。
20.4、本发明通过设置分筛板,可以将果实和树叶和杂质筛分,通过设置密封板和导向板,可以对第一支撑罩和第二支撑罩的顶部和底部进行封锁和导向。
21.5、本发明通过设置进料孔和导向孔,可以对果实进行导向。
22.6、本发明通过设置导向管,可以对果实进行导向,通过设置限位杆和限位孔,可以对连接杆的位置进行限位。
23.7、本发明通过设置排渣孔,可以对果实中附带的灰尘和小的颗粒物进行排放。
24.8、本发明通过设置安装杆和固定槽,可以对限位杆的位置进行固定和限位,通过设置弹簧,可以使安装板移动后复位,通过设置配合块,可以对配合杆的位置进行限位。
25.9、本发明通过设置活动杆和活动块,可以对转盘进行调节,通过设置转盘,可以对安装板的位置进行限位。
附图说明
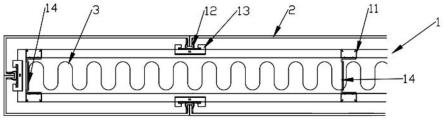
26.图1是本发明实施例提供的结构示意图;
27.图2是本发明实施例提供局部结构的立体图;
28.图3是本发明实施例提供螺旋导轨的立体图;
29.图4是本发明实施例提供局部结构的爆炸分布图;
30.图5是本发明实施例提供结构的后视图;
31.图6是本发明实施例提供结构的前视剖视图;
32.图7是本发明实施例提供回旋盘的俯视图;
33.图8是本发明实施例提供限位块、限位杆和连接杆的立体图;
34.图9是本发明实施例提供固定机构和传动机构的立体图;
35.图10是本发明实施例提供限位块的前视剖视图。
36.图中:1、第一支撑罩;2、第二支撑罩;3、收集箱;4、分筛板;5、密封板;6、导向板;7、回旋盘;8、螺旋导轨;9、限位块;10、限位孔;11、连接杆;12、限位杆;13、安装机构;1301、安装杆;1302、安装板;1303、弹簧;1304、配合块;1305、配合杆;14、传动机构;1401、拉杆;1402、活动杆;1403、转盘;1404、活动块;15、进料孔;16、导向孔;17、导向管;18、固定槽;19、排渣孔;20、对接块;21、排料管。
具体实施方式
37.为能进一步了解本发明的发明内容、特点及功效,兹例举以下实施例,并配合附图详细说明如下。
38.下面结合附图对本发明的结构作详细的描述。
39.如图1至图10所示,本发明实施例提供的基于园林绿化树木果实收集结构及其安装方法,包括第一支撑罩1、第二支撑罩2、收集箱3、分筛板4、两个密封板5和两个导向板6,
第二支撑罩2位于第一支撑罩1的右侧,收集箱3位于第一支撑罩1的底部,分筛板4位于收集箱3的内腔,密封板5位于第一支撑罩1和第二支撑罩2内腔的底部,导向板6位于第一支撑罩1和第二支撑罩2内腔的顶部,第一支撑罩1和第二支撑罩2的内腔均固定连接有回旋盘7,第一支撑罩1通过合页与第二支撑罩2活动连接,第一支撑罩1和第二支撑罩2的内腔均设置有螺旋导轨8,第一支撑罩1和第二支撑罩2的前侧均固定连接有限位块9,限位块9的前侧开设有限位孔10,限位块9的前侧设置有连接杆11,连接杆11后侧的两侧均固定连接有限位杆12,限位杆12的后侧穿过限位孔10并延伸至限位块9的内腔,限位块9的内腔设置有与限位杆12配合使用的固定机构13,限位块9的前侧设置有与固定机构13配合使用的传动机构14。
40.参考图9和图10,固定机构13包括安装杆1301,安装杆1301远离限位杆12的一侧固定连接有与传动机构14配合使用的安装板1302,安装板1302远离安装杆1301一侧的顶部和底部均固定连接有弹簧1303,两个安装板1302相对的一侧设置有配合块1304,安装板1302靠近配合块1304的一侧固定连接有配合杆1305,配合杆1305靠近配合块1304的一侧延伸至配合块1304的内腔。
41.采用上述方案:通过设置固定机构13,可以对限位杆12的位置进行固定和限位,防止限位杆12移动影响对连接杆11的定位能力。
42.参考图9和图10,传动机构14包括拉杆1401,拉杆1401的后侧延伸至限位块9的内腔并固定连接有活动杆1402,活动杆1402顶部的两侧均设置有转盘1403,两个转盘1403相对的一侧均固定连接有与活动杆1402配合使用的活动块1404。
43.采用上述方案:通过设置传动机构14,可以对安装板1302的位置进行调节,方便使用者使用。
44.参考图1和图4,分筛板4靠近收集箱3内壁的一侧与收集箱3的内壁固定连接,密封板5和导向板6靠近第一支撑罩1和第二支撑罩2内壁的一侧与第一支撑罩1的内壁和第二支撑罩2的内壁接触固定连接。
45.采用上述方案:通过设置分筛板4,可以将果实和树叶和杂质筛分,通过设置密封板5和导向板6,可以对第一支撑罩1和第二支撑罩2的顶部和底部进行封锁和导向。
46.参考图4和图7,导向板6的表面开设有进料孔15,进料孔15的数量为若干个,且环形分布于导向板6的表面,回旋盘7的底部开设有导向孔16,导向孔16的内腔设置有导向管17。
47.采用上述方案:通过设置进料孔15和导向孔16,可以对果实进行导向。
48.参考图7、图8和图10,导向管17靠近导向孔16内壁的一侧与导向孔16的内壁接触,导向管17的底部延伸至回旋盘7的底部,限位杆12靠近限位孔10内壁的一侧与限位孔10的内壁接触,限位杆12的表面开设有与安装杆1301配合使用的固定槽18。
49.采用上述方案:通过设置导向管17,可以对果实进行导向,通过设置限位杆12和限位孔10,可以对连接杆11的位置进行限位。
50.参考图1和图4,第一支撑罩1和第二支撑罩2相反的一侧均开设有排渣孔19,第一支撑罩1和第二支撑罩2相对的一侧均固定连接有对接块20,螺旋导轨8的底部固定连通有排料管21。
51.采用上述方案:通过设置排渣孔19,可以对果实中附带的灰尘和小的颗粒物进行排放。
52.参考图9和图10,安装杆1301靠近固定槽18内壁的一侧与固定槽18的内壁接触,弹簧1303远离安装板1302的一侧与限位块9的内壁固定连接,配合块1304的后侧与限位块9的内壁固定连接。
53.采用上述方案:通过设置安装杆1301和固定槽18,可以对限位杆12的位置进行固定和限位,通过设置弹簧1303,可以使安装板1302移动后复位,通过设置配合块1304,可以对配合杆1305的位置进行限位。
54.参考图9和图10,活动杆1402的顶部与活动块1404接触,转盘1403靠近安装板1302的一侧与安装板1302接触,转盘1403的后侧通过转轴与限位块9的内壁活动连接。
55.采用上述方案:通过设置活动杆1402和活动块1404,可以对转盘1403进行调节,通过设置转盘1403,可以对安装板1302的位置进行限位。
56.参考图1至图10,第一步:将第一支撑罩1和第二支撑罩2放置在树木两边,然后将第一支撑罩1和第二支撑罩2向内合拢,第一支撑罩1和第二支撑罩2通过合页转动,第一支撑罩1和第二支撑罩2带动密封板5、导向板6、回旋盘7和螺旋导轨8转动并使其相互对接,对接块20与树木接触,将收集箱3放置在排料管21的底部;
57.第二步:拉动拉杆1401,拉杆1401带动活动杆1402向上移动,活动杆1402对活动块1404进行挤压,活动块1404受力后带动转盘1403转动,转盘1403旋转后对安装板1302进行挤压,安装板1302带动安装杆1301和配合杆1305移动并对弹簧1303进行挤压,配合杆1305在配合块1304的内腔滑动,然后将连接杆11放置在限位块9的前侧并向后推动,连接杆11带动限位杆12移动,限位杆12穿过限位孔10进入限位块9的内腔,然后松开拉杆1401,弹簧1303压缩后释放的力使安装杆1301复位,安装杆1301进入固定槽18的内腔,完成安装;
58.第三步;当树木的果实向下掉落时,果实首先掉落在导向板6的表面,导向板6表面的弧度会将果实导向至进料孔15的方向,果实通过进料孔15进入回旋盘7的内腔,然后通过回旋盘7中进料孔15内的导向孔16进入螺旋导轨8的内腔,螺旋导轨8将果实导向导向管17的方向,导向管17将果实输送至收集箱3的内腔,果实进入收集箱3的内腔,果实掉落至收集箱3内分筛板4的表面,分筛板4将树叶、杂物和果实分选,完成果实收集。
59.本发明的工作原理:
60.在使用时,将第一支撑罩1和第二支撑罩2放置在树木两边,然后将第一支撑罩1和第二支撑罩2向内合拢,第一支撑罩1和第二支撑罩2通过合页转动,第一支撑罩1和第二支撑罩2带动密封板5、导向板6、回旋盘7和螺旋导轨8转动并使其相互对接,对接块20与树木接触,将收集箱3放置在排料管21的底部,拉动拉杆1401,拉杆1401带动活动杆1402向上移动,活动杆1402对活动块1404进行挤压,活动块1404受力后带动转盘1403转动,转盘1403旋转后对安装板1302进行挤压,安装板1302带动安装杆1301和配合杆1305移动并对弹簧1303进行挤压,配合杆1305在配合块1304的内腔滑动,然后将连接杆11放置在限位块9的前侧并向后推动,连接杆11带动限位杆12移动,限位杆12穿过限位孔10进入限位块9的内腔,然后松开拉杆1401,弹簧1303压缩后释放的力使安装杆1301复位,安装杆1301进入固定槽18的内腔,完成安装,当树木的果实向下掉落时,果实首先掉落在导向板6的表面,导向板6表面的弧度会将果实导向至进料孔15的方向,导向板6内的风扇可以将果实中附带的小型颗粒和灰尘通过排渣孔19排出,果实通过进料孔15进入回旋盘7的内腔,然后通过回旋盘7中进料孔15内的导向孔16进入螺旋导轨8的内腔,螺旋导轨8中的风扇吹动果实快速移动,螺旋
导轨8将果实导向导向管17的方向,导向管17将果实输送至收集箱3的内腔,果实进入收集箱3的内腔,果实掉落至收集箱3内分筛板4的表面,分筛板4将树叶、杂物和果实分选,完成果实收集。
61.综上所述:该基于园林绿化树木果实收集结构及其安装方法,通过设置第一支撑罩1、第二支撑罩2、密封板5、导向板6、回旋盘7、螺旋导轨8、对接块20、收集箱3、固定机构13、限位杆12、连接杆11和限位块9的配合使用,将第一支撑罩1和第二支撑罩2放置在树木两边,然后将第一支撑罩1和第二支撑罩2向内合拢,第一支撑罩1和第二支撑罩2通过合页转动,第一支撑罩1和第二支撑罩2带动密封板5、导向板6、回旋盘7和螺旋导轨8转动并使其相互对接,对接块20与树木接触,将收集箱3放置在排料管21的底部,然后通过固定机构13、限位杆12和连接杆11对限位块9进行限位,解决了现有的收集方式大多数依靠人工采摘或放置收集装置等待果实自然掉落,但是人工采摘不仅效率低下并且存在一定的安全隐患,采摘过程较为繁琐,而现有收集装置不能将果实和树叶杂物分选,收集后还需要对树叶杂物等挑选出去,并且掉落过程容易有果实滚落至收集范围外,较为不便的问题。
62.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
63.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。