1.本发明涉及考古工具技术领域,尤其涉及一种自适应修复笔。
背景技术:
2.在考古工作中,需要经常进行文物修复及化石修复等操作。化石修复是指通过机械或化学手段去除化石表面覆盖围岩的过程。由于化石的形成时间久,通常在上亿年前,包裹于其上的围岩通常较厚且质地坚硬,常采用气动修复工具(气动修复笔)进行机械修理;文物修复采用的手段和化石修复类似,但由于文物在地下的埋藏时间通常在数千年左右,包裹于其上的沉积物多为土质,质地松软,尚未固结形成坚硬的岩石,修复时的力度要更轻,需要要选择更细的针头。
3.在实现本发明过程中,发明人发现现有技术中至少存在如下问题:
4.气动修复笔中,针对不同的场景,配置了多种力度和针头(笔尖)型号,对于初学者而言,正确地选择气动笔的针头型号和力度控制不易掌握,需要花较多时间探索。因此,如何使初学者能够快速掌握气动修复笔的使用,是需要解决的问题。
技术实现要素:
5.本发明实施例提供一种自适应修复笔,其能够在控制系统指令下根据现场情况自动更换笔尖及调整力度,可以解决现有的初学者难以掌握气动修复笔的问题。
6.为达上述目的,本发明实施例提供一种自适应修复笔,包括:笔体、控制系统、气源和笔尖切换装置;笔体内部具有多个不同规格的笔尖,且笔体的笔尖出口处只能同时容纳一个笔尖伸出;控制系统与笔尖切换装置电连接;笔尖切换装置通过气动管路与气源相连接。
7.进一步的,所述自适应修复笔还包括硬度传感器;硬度传感器与控制系统电连接。
8.进一步的,笔尖切换装置包括位于笔体内部的多个微型气缸和位于笔体外部的多个电磁换向阀;微型气缸的数量与电磁换向阀的数量相同,且每个微型气缸与相应的电磁换向阀之间通过换向气动管相连接;微型气缸中包括可以沿气缸内壁移动的活塞杆,活塞杆通过柔性管与笔尖的尾部相连。
9.进一步的,电磁换向阀为两位三通电磁阀。
10.进一步的,笔体包括前笔体和套设于前笔体外侧的后笔体;笔尖、柔性管和微型气缸设置于前笔体内;前笔体与后笔体同轴设置,且前笔体能够在后笔体内轴向移动;前笔体和后笔体之间还轴向设置有弹簧;笔体内设置有气动往复装置。
11.进一步的,气动往复装置包括设置于后笔体内的撞块,撞块能够轴向移动,且当撞块移动到最前端时,能够接触到前笔体的末端。
12.进一步的,撞块的进气孔通过主供气管与气源相连接;在主供气管中还设置有气量调节阀,气量调节阀与控制系统电连接。
13.进一步的,所述自适应修复笔还包括压力传感器;压力传感器与控制系统电连接。
14.进一步的,所述自适应修复笔还包括除尘罩;除尘罩与控制系统电连接,并与负压除尘装置通过除尘管路连接。
15.进一步的,所述自适应修复笔还包括湿度传感器;湿度传感器与控制系统电连接。
16.上述技术方案具有如下有益效果:
17.本发明的技术方案中,根据传感器采集的信息和待修复材质、环境等信息,确定围岩硬度和孔隙度,结合预制算法,使得在控制系统的指令下,气动修复笔可以自动更换到相应的笔尖型号,从而便于初学者快速掌握。
18.此外,本技术还具有以下特点:
19.1、根据压力传感器的采集信息,气动修复笔可以自动进行力度控制;
20.2、在修复笔上集成了即时除尘装置,实现即修即清理,解决了目前粉尘清理不及时以及可能产生细微扬尘的问题,并且可根据湿度传感器的反馈保持修复空间干燥。
附图说明
21.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
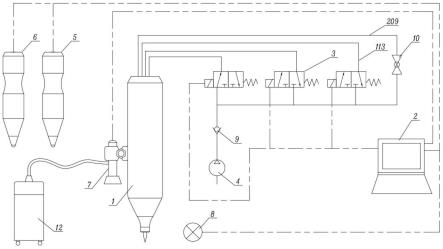
22.图1是本发明实施例一种自适应修复笔的结构示意图;
23.图2是本发明实施例中笔体内部的结构示意图;
24.附图标号:1、笔体;2、控制系统;3、电磁换向阀;4、气源;5、硬度传感器;6、压力传感器;7、除尘罩;8、湿度传感器;9、单向阀;10、气量调节阀;12、负压除尘装置;101、前笔体;102、笔尖;103、弧面;104、柔性管;105、气缸支撑架;106、微型气缸;107、活塞杆;108、活塞弹簧;109、前笔体后盖;110、前笔体后凸缘;111、前笔体后盖凸缘;112、活塞无杆腔;113、换向气动管;201、后笔体;202、弹簧;203、后笔体隔板;204、后笔体后盖;205、撞块;206、撞块导向座;207、第二出气接头;208、第一出气接头;209、主供气管。
具体实施方式
25.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
26.本发明实施例提供一种自适应修复笔,包括:笔体1、控制系统2、气源4和笔尖切换装置;所述笔体1内部具有多个不同规格的笔尖102,且所述笔体1的笔尖出口处只能同时容纳一个所述笔尖102伸出;所述控制系统2与所述笔尖切换装置电连接;所述笔尖切换装置通过气动管路与气源4相连接。
27.为了解决初学者不易掌握修复笔的问题,本技术中,如图1所示,将气动修复笔的笔体1与控制系统2(如电脑等)连接起来,并在二者间设置笔尖切换装置,当控制系统2 根据其他外置设备(例如化石体观察平台等)的反馈确定当前笔尖102不适应当前围岩环境、需要更换笔尖时,会对笔尖切换装置发出指令,通过笔尖切换装置的动作使笔体1内部的满
足当前环境要求的笔尖102从笔尖出口处伸出供用户使用,这个过程无需人工参与,依靠控制系统2及预制的算法进行自动选择,因而对初学者非常友好,使得初学者可以快速投入工作,并在使用过程中了解和掌握笔尖102的选择/更换的原则。如图2所示,笔体 1内,具有多个笔尖102(本技术附图2中为简便起见,只示意了两个笔尖102,实际应用时可以为多个),而笔尖出口处只能容纳一个笔尖102,从而避免了意外情况下多个笔尖 102一起伸出所带来的问题。
28.笔尖切换装置可为电动或气动等驱动形式。由于目前大部分修复笔采用气动推动来实现笔尖102的震动,以此提高工作效率,因此本技术中,优选气动形式的笔尖切换装置。气源4用于为笔尖切换装置提供动力,为了保证系统稳定运行,还可以在气源4出口处的管路中设置一个单向阀9。
29.进一步的,所述自适应修复笔还包括硬度传感器5;所述硬度传感器5与所述控制系统2电连接。
30.为了进一步提高本技术的自动适应能力,如图1所示,还配置了硬度传感器5。硬度传感器5可以采集当前操作目标的硬度值,并将硬度值反馈给控制系统2,对采集到的硬度值与预置的当前在用笔尖102的硬度值范围进行对比。当超出当前在用笔尖102的硬度值范围后,则判定当前笔尖102不满足当前使用需求,需要更换笔尖。此时,通过控制系统2在预存的数据库中查找,确定出当前实际采集到的硬度值所对应的合适的笔尖102的型号,之后向笔尖切换装置发出指令,使当前在用笔尖102缩回至笔体1内,并使选定的正确笔尖102伸出。
31.进一步的,所述笔尖切换装置包括位于所述笔体1内部的多个微型气缸106和位于所述笔体1外部的多个电磁换向阀3;所述微型气缸106的数量与所述电磁换向阀3的数量相同,且每个所述微型气缸106与相应的电磁换向阀3之间通过换向气动管113相连接;所述微型气缸106中包括可以沿气缸内壁移动的活塞杆107,所述活塞杆107通过柔性管 104与所述笔尖102的尾部相连。
32.本技术中,采用电磁换向阀3与微型气缸106的组合实现切换动作。如图2所示,多个微型气缸106通过气缸支撑架105固定在笔体1的内部,气钢支撑架105可以通过螺纹连接等方式与笔体1固定。在笔尖102后端连接柔性管104,并将柔性管104的另一端与微型气缸106底部的活塞杆107连接,在收到控制系统2给出的动作信号后,某个电磁换向阀3动作,使进气路导通,气体通过相应的换向气动管113进入到微型气缸106上端的入口处,使活塞无杆腔112内充满气体,并推动活塞杆107克服活塞弹簧108的弹力向下移动,从而带动对应的柔性管104及笔尖102向下移动。由于笔体1内具有多个笔尖102,因此,多个笔尖102均与笔尖出口处偏心设置,此时,在弧面103的引导下,柔性管104 发生一定角度的变形,使笔尖102从笔尖出口处伸出。柔性管104可以采用聚氨酯、尼龙等材料制作,也可以设计成内部非金属管、外套钢编层的多层结构。
33.进一步的,所述电磁换向阀3为两位三通电磁阀。
34.电磁换向阀3可以为两位两通电磁阀或两位三通电磁阀,但为了使笔尖快速复位,本技术中优选两位三通电磁阀形式。在需要更换笔尖102时,需要将当前在用的笔尖102复位,使其回缩到笔体1内部。此时工作流程如下:控制系统2对当前在用笔尖102所对应的电磁换向阀3给出信号,使电磁阀气路换向,活塞无杆腔112内的气体便沿两位三通电磁阀的
排气口排出,之后被压缩的活塞弹簧108反向推动活塞杆107向上移动,使笔尖102 回撤到笔体1内部。
35.进一步的,所述笔体1包括前笔体101和套设于所述前笔体101外侧的后笔体201;所述笔尖102、所述柔性管104和所述微型气缸106设置于所述前笔体101内;所述前笔体101与所述后笔体201同轴设置,且所述前笔体101能够在所述后笔体201内轴向移动;所述前笔体101和所述后笔体201之间还轴向设置有弹簧202;所述笔体1内设置有气动往复装置。
36.前述的方案即可实现笔尖102的自动适应性更换,可以用于进行文物特别是化石的修复,但为了提高工作效率,可在该方案中增加气动往复装置,以实现笔尖102的脉冲式振动。尽管气动往复装置作为一种现有技术,已经在气动修复笔上得到了较多应用,但本技术中由于具备笔尖切换装置,其结构与现有技术的气动修复笔已经完全不同,因此,现有技术的气动往复装置不能直接应用。本技术将气动修复笔设计为双层结构,即,分为前笔体101和后笔体201,在使用时操作者可以手持后笔体201的前端外表面。前笔体101的尾部设置一个凸出于前笔体101外表面的前笔体后凸缘110,后笔体201的前端也具有一个向内侧凹的环状凸台,在环状凸台与前笔体后凸缘110之间,设置弹簧202,用以辅助气动往复装置实现前笔体101在后笔体201内的轴向往复移动。
37.为了便于安装,后笔体201的尾部设置有后笔体后盖204,二者可以以螺纹等方式连接到一起。在装配时,可先将前笔体101的内部组件预装好,之后将前笔体101和弹簧202 从后笔体201的尾部开放端装入,之后装配后笔体隔板203、撞块205、后笔体后盖204 等部件。
38.进一步的,所述气动往复装置包括设置于所述后笔体201内的撞块205,所述撞块205 能够轴向移动,且当所述撞块205移动到最前端时,能够接触到所述前笔体101的末端。
39.本技术中,采用能够在撞块导向座206内轴向运动的撞块205来实现振动。气源4通过主供气管209向后笔体201顶部空腔内输入压缩空气,由于后笔体隔板203的阻断,压缩空气不会向外部扩散出去,气体经由撞块导向座206上的侧方开孔进入撞块205的中间空腔内,推动撞块205向下移动,并撞击固定连接于前笔体101末端的前笔体后盖109的中间部位(也可在前笔体后盖109中间处设置凸起的前笔体后盖凸缘111,作为撞块205 的接触点),使得整个前笔体101内的所有部件一起向下移动;在撞块205向下移动过程中,撞块205的中间空腔被后笔体隔板203的侧面阻挡,因此不再接触到撞块导向座206 的侧方进气孔而泄压,气体流向发生变化,撞块205侧方的空腔进气,使撞块205反向移动直至复位,此时在弹簧202作用力下,前笔体101也向上复位。如此循环工作,可使当前在用的笔尖102对修复目标产生脉冲式冲击。撞块205本身作为气动往复装置中的一种,属于现有技术,故其详细结构不再赘述。
40.进一步的,所述撞块205的进气孔通过主供气管209与气源4相连接;在主供气管209 中还设置有气量调节阀10,所述气量调节阀10与所述控制系统2电连接。
41.为便于控制,本技术中,将气动往复装置所需的气路与笔尖切换装置所需的的气路分开设置。如图2所示,往复装置用气通过主供气管209由第二出气接头207引入后笔体201 内部;笔尖切换装置用气由换向气动管113经由第一出气接头208引入到前笔体101内的微型气缸106中。
42.进一步的,所述自适应修复笔还包括压力传感器6;所述压力传感器6与所述控制
系统2电连接。
43.力度指气动笔笔尖的振动频率,对于不同环境需要经常更换修复笔的力度。为了能够自动控制修复笔的力度,本技术还设置了压力传感器6,其用于向控制系统2反馈压力信号。综合硬度传感器5和压力传感器6的反馈信号,经控制系统2分析后,即可根据硬度值、压力值综合判断当前修复工作碰到哪种岩石或者化石了,从而计算出合适的力度。本技术中,在主供气管209中设置有电控的气量调节阀10,通过压力反馈信号,控制系统2 根据预置算法可进行判断,是否,若需要调整的话,可通过调整气量调节阀10的阀门开度来实现对气动修复笔的力度调整
44.进一步的,所述自适应修复笔还包括除尘罩7;所述除尘罩7与所述控制系统2电连接,并与负压除尘装置12通过除尘管路连接。
45.在修复过程中,会伴随着产生大量粉尘,需要及时清除。目前的方式多采用吸耳球向侧方吹或在工作台上增加负压吸尘罩,仍不能完全避免粉尘在清除过程中被吸入修理者体内,进而对其身体健康造成损害。为此,本技术中可通过固定架将除尘罩12集成安装于笔体1上,使粉尘被就近清除,不会散播到空气中。为了自动控制除尘罩12的吸力,可将负压除尘装置12与控制系统2连接,通过控制系统2实时调整。同时,通过负压抽取空气,还可以调节作业区域的空气湿度。
46.进一步的,所述自适应修复笔还包括湿度传感器8;所述湿度传感器8与所述控制系统2电连接。
47.在本技术中,还设置有湿度传感器8,可使系统根据湿度传感器8的反馈信号调节除湿的力度,即调节负压除尘装置12抽空气的力度,从而保持修复位置的干燥。
48.在上述的详细描述中,各种特征一起组合在单个的实施方案中,以简化本公开。不应该将这种公开方法解释为反映了这样的意图,即,所要求保护的主题的实施方案需要比清楚地在每个权利要求中所陈述的特征更多的特征。相反,如所附的权利要求书所反映的那样,本发明处于比所公开的单个实施方案的全部特征少的状态。因此,所附的权利要求书特此清楚地被并入详细描述中,其中每项权利要求独自作为本发明单独的优选实施方案。
49.为使本领域内的任何技术人员能够实现或者使用本发明,上面对所公开实施例进行了描述。对于本领域技术人员来说;这些实施例的各种修改方式都是显而易见的,并且本文定义的一般原理也可以在不脱离本公开的精神和保护范围的基础上适用于其它实施例。因此,本公开并不限于本文给出的实施例,而是与本技术公开的原理和新颖性特征的最广范围相一致。
50.以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
