1.本发明属于卫星导航技术领域,具体涉及一种基于北斗三代导航卫星的共视数据处理方法。
背景技术:
2.卫星导航中的高精度时间频率已经成为国家发展科技、经济、军事的基础,也和我们社会生活息息相关,从基础研究领域,到工程技术领域,尤其是电力、通信、金融、公安、交通、互联网等领域,精准的时间频率和时间同步尤为重要。
3.2020年北斗已经建成全球导航系统,基于北斗导航系统,实现远程的时间频率传递和溯源是一种性价比较高的方案。目前,使用北斗导航进行时间频率传递和溯源已在多个领域得到广泛应用,比如:计量、通信、电力、航天等领域。但是,大部分时间频率传递系统,还是通过gps或北斗二代卫星导航系统,随着北斗二代卫星系统使用期限的到来,而依赖gps卫星导航系统又存在较大的不安全性。
4.目前,基于北斗卫星导航系统的时间频率传递方法,主要还是通过b1i、b2i、b3i等常用频点实现共视比对,仍然存在着精度较低的问题。需要采用北斗三代卫星导航系统新体制的频点b1c、b2a进行卫星共视比对,同时也需要对算法进行改进,达到更高的精度,从而可以应用在对精度要求较高的计量、国防建设等领域。
技术实现要素:
5.针对以上不足,本发明提供了一种基于北斗三代导航卫星的共视数据处理方法。本发明所述的方法主要是通过北斗三代导航卫星新体制的频点b1c、b2a,进行伪距组合观测,实现共视数据的生成,再进行时间频率传递。
6.本发明的方法具体通过如下技术方案实现的。
7.1、获取北斗三代卫星的b1c、b2a导航电文,并解析卫星星历、钟差参数、群延迟修正参数、电离层延迟改正模型参数、bdt-utc时间同步参数等;
8.2、获取接收机在观测历元时所有跟踪卫星的b1c、b2a伪距,
9.3、对上述伪距进行延迟修正,修正线缆延迟、参考延迟和接收机内部延迟
[0010][0011][0012]
其中:为第i颗卫星,延迟修正后的伪距;
[0013]
为第i颗卫星,未进行延迟修正的伪距;
[0014]
cabdly、refdly分别为天线线缆延迟、接收机外部参考延迟;
[0015]
intdly
b1c
、intdly
b2a
分别为b1c、b2a频点的接收机内部延迟;
[0016]
4、通过获取的北斗三代卫星导航电文中的星历参数,计算每个卫星在观测历元的
三维位置,该位置计算需考虑sgnac效应的影响,并计算卫星与接收机天线之间的空间几何距离
[0017]
进一步地,计算所述距离的具体方法为:
[0018][0019]
其中:为观测历元时刻,卫星和北斗接收机天线之间的空间几何距离,单位为秒;
[0020]
c为光速,299792458米/秒;
[0021]
为第i个卫星的三维位置;
[0022]
x
ant
、y
ant
、z
ant
为北斗接收机天线所在的精确位置;
[0023]
5、根据北斗三代卫星导航电文计算卫星的位置,并通过接收机位置和卫星位置计算观测历元时刻,第i个卫星的钟差对流层延迟其中卫星钟差的计算公式为:
[0024][0025][0026]
式中,分别为第i颗卫星的卫星钟差系数、卫星钟漂移系数、卫星钟漂移率系数,从星历参数中获取;
[0027]
t为第i颗卫星信号信号发射时刻的bdt时间,单位秒;
[0028]
t
oc
为卫星钟差参数参考时刻,单位秒;
[0029]
为第i颗卫星的相对论修正项;
[0030]
e为卫星轨道扁心率,由卫星星历参数获取;
[0031]
为卫星轨道长半轴的开方,由卫星星历参数获取;
[0032]ek
为卫星轨道偏近点角,由卫星星历参数获取;
[0033]
其中μ=3.986004418
×
10
14
m3/s2,为地心引力常数;
[0034]
c=2.99792458
×
108m/s为光速;
[0035]
对流层延迟的计算公式为:
[0036]
[0037]
式中,ns=324.8;nslog=ln((ns δn)/105);;
[0038]
6、根据导航电文中的群延迟修正参数,计算所有跟踪卫星的群延迟;
[0039]
a、对于使用b1c和b2a导频分量测量伪距的修正公式如下:
[0040][0041][0042]
其中:分别为第i个卫星经过线缆延迟、参考延迟、接收机内延迟、群延迟修正后的b1c、b2a伪距;
[0043]
分别为第i个卫星的b1c、b2a的导频分量上的群延迟,从b1c、b2a导航电文中获得。
[0044]
b、对于使用b1c和b2a数据分量测量伪距的修正公式如下:
[0045][0046][0047]
其中:分别为第i个卫星经过线缆延迟、参考延迟、接收机内延迟、群延迟修正后的b1c、b2a伪距;
[0048]
分别为第i个卫星的b1c、b2a的导频分量上的群延迟,从b1c、b2a导航电文中获得。
[0049]
分别为第i个卫星的b1c、b2a频点,数据分量相对于导频分量上的延迟修正项。
[0050]
7、根据修正延迟后的b1c和b2a双频点的伪距,进行电离层修正;
[0051][0052]
其中:是第i个卫星的b1c和b2a伪距组合修正电离层延迟后的伪距;
[0053]
f1、f2分别为b1c和b2a频点的频率,1575.42mhz、1176.45mhz;
[0054]
8、通过以上延迟修正后获得本地时钟与北斗卫星系统时的钟差结果;
[0055][0056]
其中:是第i颗卫星计算的本地时钟与北斗卫星系统时的钟差;
[0057]
t
refclock
是本地时钟的参考时刻,是第i颗卫星的卫星时钟的参考时刻(已修正卫星钟差);
[0058]
是上述过程计算的参数;
[0059]
9、对所有跟踪卫星计算的钟差,对钟差进行拟合。
[0060]
本发明创造与现有技术相比,克服了现有技术的缺陷,同时还具有如下的优点和
积极效果;
[0061]
1、本发明在原有标准cggtts 2e版本上增加了北斗三代的共视数据生成方法,并实现了数据内容和格式的向前兼容,可以推广北斗三代在时间频率传递领域的国际应用;
[0062]
2、采用本发明方法,两台北斗共视接收机做共钟差测试,同时计算北斗二代b1i、b2i和北斗三代b1c、b2a频点组合数据,共视比对的a类不确定度,由北斗二代的1.42纳秒提高到北斗三代的0.65纳秒,提高了1倍的精度。
[0063]
3、随着北斗三代在各领域的推广应用,可逐渐使用本发明替代原有旧标准,提升产品的可用性和精度。
附图说明
[0064]
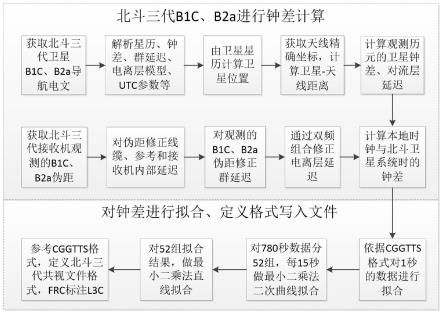
图1为本发明的基于北斗三代导航卫星的共视数据处理方法的。
具体实施方式
[0065]
如图1所示,本发明的一种基于北斗三代导航卫星的共视数据处理方法,其中该方法具体包括如下步骤:
[0066]
获取北斗三代卫星的b1c、b2a导航电文,并解析卫星星历、钟差参数、群延迟修正参数、电离层延迟改正模型参数、bdt-utc时间同步参数等;
[0067]
获取接收机在观测历元时所有跟踪卫星的b1c、b2a伪距,
[0068]
对伪距进行延迟修正,修正线缆延迟、参考延迟和接收机内部延迟
[0069][0070][0071]
其中:为第i颗卫星,延迟修正后的伪距;
[0072]
为第i颗卫星,未进行延迟修正的伪距;
[0073]
cabdly、refdly为天线线缆延迟、接收机外部参考延迟;
[0074]
intdly
b1c
、intdly
b2a
分别为b1c、b2a频点的接收机内部延迟;
[0075]
通过获取的北斗三代卫星导航电文中的星历参数,依据《北斗卫星导航系统空间信号接口控制文件公开服务信号b1c》计算每个卫星在观测历元的三维位置,该位置计算需考虑sgnac效应的影响,并计算卫星与接收机天线之间的距离。
[0076][0077]
其中:为观测历元,卫星和北斗接收机天线之间的真实距离,单位秒;
[0078]
c为光速,299792458米/秒;
[0079]
为第i个卫星的三维位置;
[0080]
x
ant
、y
ant
、z
ant
为北斗接收机天线所在的精确位置;
[0081]
根据卫星位置计算观测历元,第i个卫星的钟差对流层延迟
[0082]
根据导航电文中的群延迟修正参数,计算所有跟踪卫星的群延迟;
[0083]
a、对于使用b1c和b2a导频分量测量伪距的修正公式如下:
[0084][0085][0086]
其中:分别为第i个卫星经过线缆延迟、参考延迟、接收机内延迟、群延迟修正后的b1c、b2a伪距;
[0087]
分别为第i个卫星的b1c、b2a的导频分量上的群延迟,从b1c、b2a导航电文中获得。
[0088]
b、对于使用b1c和b2a数据分量测量伪距的修正公式如下:
[0089][0090][0091]
其中:分别为第i个卫星经过线缆延迟、参考延迟、接收机内延迟、群延迟修正后的b1c、b2a伪距;
[0092]
分别为第i个卫星的b1c、b2a的导频分量上的群延迟,从b1c、b2a导航电文中获得。
[0093]
分别为第i个卫星的b1c、b2a频点,数据分量相对于导频分量上的延迟修正项。
[0094]
根据修正延迟后的b1c和b2a双频点的伪距,进行电离层修正;
[0095][0096]
其中:是第i个卫星的b1c和b2a伪距组合修正电离层延迟后的伪距;
[0097]
f1、f2分别为b1c和b2a频点的频率,1575.42mhz、1176.45mhz;
[0098]
通过以上延迟修正后获得本地时钟与北斗卫星系统时的钟差结果;
[0099][0100]
其中:是第i颗卫星计算的本地时钟与北斗卫星系统时的钟差;
[0101]
t
refclock
是本地时钟的参考时刻,是第i颗卫星的卫星时钟的参考时刻(已修正卫星钟差);
[0102]
是上述过程计算的参数;
[0103]
对所有跟踪卫星计算的钟差,对钟差进行拟合。
[0104]
具体地,对钟差进行拟合可依据如下规则,跟踪卫星的起始时刻的计算采用utc时间,以1997年10月1日0点2分作为起点,每16分钟一组,周期为1436分钟(含89个16分钟和1个12分钟),每个16分钟内钟差数据,去掉前2分钟和后1分钟的数据,选择其中的780秒的数
据,先分为52组数据,每15秒一组数据,做最小二乘法二次曲线拟合取中点时刻对应的钟差,再将52组拟合后的钟差,做最小二乘法直线拟合,取中点时刻对应的钟差,其它列的数值的拟合方法与其相同。
[0105]
将所有跟踪卫星依据b1c和b2a伪距生成的共视数据,与标准cggtts规定b1i和b2i组合伪距计算的结果,一起写入cz文件中。对于b1c和b2a伪距生成的共视数据,在frc列标注“l3c”,作为增加北斗三代的cggtts数据格式。
[0106]
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
