1.本发明涉及一种在线晶圆检测装置和控制系统。
背景技术:
2.从半导体工艺的流程中可以看出,晶圆是制造集成电路的基本材料,在其背面减薄的磨削加工过程中,表面质量的控制十分重要。表面质量不好的晶圆会存在应力集中、裂缝等隐患。在下一步分割晶圆片时,会导致晶圆崩裂的巨大损失。表面粗糙度是衡量表面质量最重要的参数,它是对加工表面所有微小间距和峰谷不平度的微观几何尺寸特征的综合评价,能够反映表面应力分布情况,以此判断表面质量的好坏。
3.目前几乎所有厂家的晶圆片磨削质量都不能在线检测,而是下线批量检测。对于大批量的晶圆生产,这种下线检测方式严重影响了生产速度,而且不能实现在晶圆的磨削加工中对表面质量进行控制。
技术实现要素:
4.本发明的目的在于提供一种在线晶圆检测装置和控制系统,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:一种在线晶圆检测装置和控制系统,该装置包括视觉检测工位,所述的视觉检测工位包括支架、投屏和工业相机,所述支架从上往下分别设有光源、半透半反镜和承片台,所述投屏设置在支架一侧,工业相机设置在投屏后方;所述的控制系统包括图像采集系统、图像处理系统、动作执行机构;
6.所述图像采集系统包括光源、半透半反镜、承片台、投屏和工业相机。
7.优选的,所述控制系统工作步骤如下:
8.通过机械手吸盘将晶片放置在承片台上,光线穿过半透半反镜照射在晶片表面后,再反射和散射到半透半反镜,最后投射到投屏,工业相机采集图像,再经过处理,扫描整幅图像,找到图像散射光带长轴所在的方向和位置,并将长轴倾斜的图像旋转至水平位置,最后对比标准值得出晶片的是否合格,将数据传送给分类器。
9.优选的,所述图像处理是经过二位高斯低通滤波器消除杂音。
10.优选的,所述扫描整幅图像,找到图像散射光带长轴所在的方向和位置的方法是:滤波后的图像,在每个竖直方向的像素点系列中,长轴所在的点灰度值最大,因此逐一扫描图像中的每个竖直序列,寻找到灰度值最大的点所在的位置,即可确定长轴方向。
11.优选的,所述动作执行机构是基于mgsa-svm算法的分类器。
12.与现有技术相比,本发明的有益效果是:本发明设计了在线晶圆检测装置和控制系统,降低晶圆崩裂的风险,提高晶圆加工的质量,同时可以减少检测人员的操作难度,提高检测效率。
附图说明
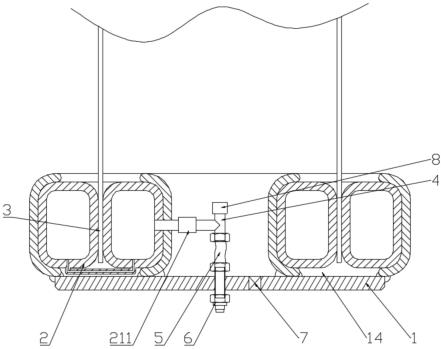
13.图1为本发明视觉检测装置的示意图;
14.图2为本发明图像处理中图像旋转坐标;
15.图3为本发明图像处理中双线性插值算法示意图;
16.图4为工业相机采集的图像;
17.图中:1光源,2半透半反镜,3承片台,4投屏,5工业相机,6支架。
具体实施方式
18.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
19.请参阅图1,本发明提供一种技术方案:一种在线晶圆检测装置和控制系统,该装置包括视觉检测工位,视觉检测工位包括支架6、投屏4和工业相机5,支架6从上往下分别设有光源1、半透半反镜2和承片台3,所述投屏4设置在支架6一侧,工业相机5设置在投屏4后方;所述的控制系统包括图像采集系统、图像处理系统、动作执行机构;
20.图像采集系统包括光源1、半透半反镜2、承片台3、投屏4和工业相机5,通过机械手吸盘将晶片放置在承片台3上,光线穿过半透半反镜2照射在晶片表面后,再反射和散射到半透半反镜2,最后投射到投屏4,工业相机5采集图像;
21.以光散射为原理的晶片表面粗糙度测量方法是以一定大小直径的光斑投射到晶片表面,由于受微观形貌对光干涉和衍射因子的调制,使得反射光束形成反射光斑为中心以及两翼的散射光带,在一定范围内,表面散射光角度分布与表面粗糙度具有一一对应关系。
22.图像处理系统是经过二位高斯低通滤波器消除杂音后,扫描整幅图像,找到图像散射光带长轴所在的方向和位置的方法是:滤波后的图像,在每个竖直方向的像素点系列中,长轴所在的点灰度值最大,因此逐一扫描图像中的每个竖直序列,寻找到灰度值最大的点所在的位置,即可确定长轴方向,
23.对于滤波后的图像,在每个竖直方向的像素点系列中,长轴所在的点灰度值最大,因此逐一扫描图像中的每个竖直序列,寻找到灰度值最大的点所在的位置,即可确定长轴方向。对于尺寸为m*n的图像,其灰度矩阵为:
[0024][0025]
对于矩阵中每一个列向量fi[0026]fi
=(f(0,i),f(1,i),
…
,f(m-1i))
t
,i=0,1,
…
n-1
[0027]
在其中寻找最大值所在的位置ni,使得
[0028]
f(ni,i)=max(f(0,i),f(1,i),
…
,f(m-1,i)),i=0,1,
…
n-1
[0029]
于是便得到散射光带长轴所在的位置。一般寻找最大值的算法只返回第一个最大值所在的位置,最大的点可能不止一个,可以通过对由上至下和由下至上两次寻得的最大值位置进行平均的方法进行修正;
[0030]
散射光带在采集图像中通常并不位于水平位置,即长轴并不处在水平方向,需要通过图像处理算法将长轴及整幅图像旋转至水平方向,
[0031]
如图2所示,点(x0,y0)经过旋转度后坐标变成(x1,y1),
[0032]
在旋转前:
[0033][0034]
旋转后:
[0035][0036]
由于旋转后图像像素点坐标不再是整数,故旋转后必须对像素点灰度进行二维插值运算,
[0037]
如图3所示,设0<x<1,0<y<1,首先可以通过一阶线性插值得出f(x,0),
[0038]
f(x,0)=f(0,0)x[f(1,0)-f(0,0)],
[0039]
类似地,对f(x,0)进行一阶线性插值:
[0040]
f(x,1)=f(0,1)x[f(1,1)-f(0,1)],
[0041]
最后,对竖直方向进行一阶线性插值,以确定f(x,y)。
[0042]
f(x,)=f(x,0) [f(x,1)-f(x,0)]。
[0043]
图4所示,狭长散射光带的几何中心最为明亮,并在狭长延伸及其垂直方向上呈现轴对称,通过引用数学中对椭圆长短轴的定义,来定义狭长散射光带的长短轴,进而提出参数:散射特征参数sn,
[0044][0045]
n是光电接收器阵列中单元数;ii是第i个单元的光电信号值,k是比例系数,是该方向上灰度数值的平均值,pi是第i个像素处归一化的灰度值。
[0046]
s1是着散射光带长轴,他随着晶圆表面粗糙度增加而增加,那么可以得出s1越小晶片表面粗糙度越小
[0047]
s2是沿着散射光带短轴,他随着晶圆表面粗糙度增加而减小;
[0048]
s3是短轴方向的一系列灰度平均值,他随着晶圆表面粗糙度增加而增加;
[0049]
s4是长轴方向的一系列灰度平均值,他随着晶圆表面粗糙度增加而增加;
[0050]
s5是散射光带长轴上灰度值分布的标准差,他随着晶圆表面粗糙度增加而减小;
[0051]
s6是散射光带短轴上灰度值分布的标准差,他随着晶圆表面粗糙度增加而增加;
[0052]
s7是沿短轴方向的一系列灰度平均值的标准差,他随着晶圆表面粗糙度增加而减小
[0053]
s8是沿长轴方向的一系列灰度平均值的标准差,他随着晶圆表面粗糙度增加而减
小;
[0054]
当得s1~s8的数值与r的标准值相对应时,晶片为合格品。
[0055]
检测完晶片后,动作执行机构将晶片分类处理,动作执行机构是基于mgsa-svm算法的分类器,s1~s8都可以作为参数,
[0056]
用rbf函数作为分类器核函数,计算公式:
[0057]
k(x,y)=exp(-γ||x-y||2),γ>0,
[0058]
优化算法:即mgsa对svm的参数和特征信息优化,数据输入:数据集(晶片样本数据集)d,根据所使用的数据集来确定粒子的空间维数为nf 2,误差惩罚参数c的范围为[c
min
,c
max
],核函数参数γ的范围为[γ
min
,γ
max
],寻优函数的权重参数是根据数据集的大小确定粒子数目为n,整个寻优过程的最大迭代次数t,
[0059]
结果输出:经过mgsa优化后的核函数参数c和γ,以及特征子集fs。
[0060]
mgsa-svm算法如下:
[0061]
1、晶片样本集d进行归一化处理,即将硅片数据集的特征值都转换到[0,1]上,然后将晶片样本集d按照一定的方法分为训练集d1和测试集d2,
[0062]
2根据硅片样本集的特征向量数nf计算粒子维数的值d=nf 2,最后依据粒子维数d确定所需的种群粒子数目n,
[0063]
3根据公式:计算粒子群中所有粒子的适应度值,粒子i在优化中得到特征子集fsi,可以根据rbf函数计算公式以及参数c
min
,c
max
和参数γ
min
,γ
max
,得到支持向量机参数ci和γi。由优化得到的特征子集fsi,对训练集d1和测试集d2进行特征选择,得到训练集d
1i
和测试集d
2i
,以d
1i
为分类器的训练集,ci和γi为参数构造分类模型m,最后在分类器的测试集d
2i
上测试模型m,得到的准确率为svm_accuracy。再根据计算粒子群中所有粒子的适应度值优化后的特征数目和权重参数得到粒子i的适应度值,
[0064]
其中,svm_accuracy表示svm的分类精度,而feature_num表示所选择的特征数目,是svm_accuracy的权重,用于调节两个因素在函数中所占比重,此处设为0.8。
[0065]
一般情况下,如果认为分类的准确率最为重要而不考虑所选择的特征数目,则设定
[0066]
4根据步骤三获得的粒子适应度的值,更新粒子的个体历史最佳值和种群历史最佳值;
[0067]
5根据mgsa的加速度和速度公式,计算粒子的速度;然后根据速度和位置公式,更新粒子的位置信息;
[0068]
6迭代次数是否达到最大值t。如果已经达到最大迭代次数,那么可以根据肿群历史最优值输出优化的特征子集fs和参数c,y;如果没有,那么返回3。
[0069]
svm分类精度的计算方法:
[0070]
系统所需要分类的数据集属于两类数据集,合格品和不合格品,
[0071]
正品检测准确率为hp,次品检测准确率hn和总体检测准确率ha,公式如下:
[0072][0073]
num
p
是被准确分类的正品数,numn是被准确分类的次品数,numn是硅晶片样本数据集里的正品总数,numn是样本数据集里的次品总数。
[0074]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。