1.本技术属于图像处理技术领域,具体涉及一种图像传感器、摄像模组和电子设备。
背景技术:
2.hdr是高动态范围(high-dynamic range)的简称,相比普通的图像,hdr图像可以提供更多的动态范围和图像细节,和人眼看到的图像比较接近。手机相机实现hdr效果就是一次拍摄几张曝光不同的照片,然后自动按照算法合成一张照片,达到hdr效果。而多帧降噪则是手机在拍摄夜景或者暗光环境的时候,进行多个帧数的噪点数量和位置的计算和筛选,将有噪点的地方用没有噪点的帧数替换位置,经过反复加权、替换,就得到一张几乎没有噪点的照片,其最终成像的照片实际是由多个帧数的照片合成的。
3.然而,由于hdr模式抓取的帧曝光差异太大,曝光融合算法难度大,多帧对齐较难,容易导致图像边缘错位、图像失真等问题,对于运动物体或者暗处场景下运动的物体容易出现拖影;而对于多帧降噪来说,其实现过程和hdr类似,所以也存在同样的问题。因此,现有技术在拍照过程中,由于拍摄硬件和软件的局限,拍摄得到的照片难免会出现偏色、失真的情况,使得照片的真实感较差。
技术实现要素:
4.本技术实施例的目的是提供一种图像传感器、摄像模组和电子设备,能够解决现有技术在拍照过程中由于拍摄硬件和软件的局限,导致拍摄得到的照片出现偏色、失真的情况,照片的真实感较差的问题。
5.第一方面,本技术实施例提供了一种图像传感器,该图像传感器包括:
6.像素阵列,所述像素阵列包括至少两个第一像素单元,所述第一像素单元呈六边形,所述第一像素单元包括至少四个五边形的子像素。
7.第二方面,本技术实施例提供了一种摄像模组,该摄像模组包括如第一方面所述的图像传感器。
8.第三方面,本技术实施例提供了一种电子设备,该电子设备包括如第二方面所述的摄像模组。
9.在本技术实施例中,图像传感器中的像素阵列包括至少两个第一像素单元,每一个像素单元呈六边形且包括至少四个五边形的子像素,由此,一次曝光过程中,像素单元中的多个子像素可以输出多个感光值,由此得到不同或者相同曝光值的多张图像,继而完成hdr合成和多帧降噪功能,从而有效避免图像错位、拖影等现象的发生,同时可以提升图像传感器的分辨率和感光能力,实现动态范围的扩展,提升了成像质量。
附图说明
10.图1为本技术实施例提供的第一像素单元的示意图之一;
11.图2为本技术实施例提供的像素阵列的示意图之一;
12.图3为本技术实施例提供的第一像素单元的示意图之二;
13.图4为本技术实施例提供的像素阵列的示意图之二;
14.图5为本技术实施例提供的第一像素单元的示意图之三;
15.图6为本技术实施例提供的像素阵列的示意图之三;
16.图7为本技术实施例提供的第一像素单元的示意图之四;
17.图8为本技术实施例提供的像素阵列的示意图之四;
18.图9为本技术实施例提供的第一像素单元的示意图之五;
19.图10为本技术实施例提供的像素阵列的示意图之五;
20.图11为本技术实施例提供的第一像素单元的示意图之六;
21.图12为本技术实施例提供的像素阵列的示意图之六;
22.图13为本技术实施例提供的第一像素单元的示意图之七;
23.图14为本技术实施例提供的像素阵列的示意图之七;
24.图15为本技术实施例提供的第一像素单元的示意图之八;
25.图16为本技术实施例提供的像素阵列的示意图之八;
26.图17为本技术实施例提供的红绿蓝三色的波段示意图之一;
27.图18为本技术实施例提供的红绿蓝三色划分六个子波段的示意图;
28.图19为本技术实施例提供的可见光波段划分为13个子波段的示意图;
29.图20为本技术实施例提供的像素电路结构的示意图之一;
30.图21为本技术实施例提供的像素电路结构的示意图之二;
31.图22为本技术实施例提供的摄像模组的爆炸图;
32.图23为本技术实施例提供的摄像模组的结构示意图。
具体实施方式
33.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员获得的所有其他实施例,都属于本技术保护的范围。
34.本技术的说明书和权利要求书中的术语“第一”、“第二”等是用于区别类似的对象,而不用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便本技术的实施例能够以除了在这里图示或描述的那些以外的顺序实施,且“第一”、“第二”等所区分的对象通常为一类,并不限定对象的个数,例如第一对象可以是一个,也可以是多个。此外,说明书以及权利要求中“和/或”表示所连接对象的至少其中之一,字符“/”,一般表示前后关联对象是一种“或”的关系。
35.为了便于理解,先对本技术实施例设计的相关技术进行说明。
36.相机传感器(sensor),是相机的核心,也是相机里最关键的技术。sensor分两种,一种是广泛使用的ccd(charge-coupled device,电荷耦合)元件;另一种是cmos(complementary metal oxide semiconductor,互补金属氧化物半导体)器件。与传统相机相比,传统相机使用“胶卷”作为其记录信息的载体,而数码相机的“胶卷”就是其成像感光元件,而且感光元件是与相机一体。
37.目前使用较多的是cmos器件,它和ccd元件一样同为在数码相机中可记录光线变
化的半导体。cmos主要是利用硅和锗这两种元素所做成的半导体,使其在cmos上共存着带n(带正电)和p(带正电)级的半导体,这两个互补效应所产生的电流即可被处理芯片纪录和解读成影像。
38.相机镜头(lens)是相机中最重要的部件,镜头的好坏直接影响到拍摄成像的质量。镜头可分为变焦和定焦两大类,其中,变焦镜头焦距可变、视角可变,也就是可以推拉的镜头;而定焦镜头的焦距不能变,即只有一个焦段,或者说只有一个视角。
39.cmos摄像模组(cmos camera module)是目前手机上主流使用的相机模组,主要由镜头(lens)、音圈马达(voice coil motor)、红外滤光片(ir filter)、图像传感器(cmos)、数字信号处理器(digital signal processor,dsp)及软板(flexible printed circuit,fpc)组成。
40.ccm的大致工作流程是:音圈马达带动镜头达到对焦准确的位置,外部光线穿过镜头,经过红外滤光片的滤光,照射到图像传感器的光电二极管(pixel)上,光电二极管将感知的光信号转换成电信号,通过放大电路、模数转换电路,形成数字信号矩阵(即图像),再经过数字信号处理器处理,压缩存储起来。
41.下面结合附图,通过具体的实施例及其应用场景对本技术实施例提供的一种图像传感器、摄像模组和电子设备进行详细地说明。
42.本技术一方面实施例提供了一种图像传感器,该图像传感器包括像素阵列,该像素阵列包括至少两个第一像素单元。可选地,至少两个第一像素单元可以按照预设排布方式进行排布,例如行列排布等,以形成像素阵列。第一像素单元呈六边形,并且,第一像素单元包括至少四个五边形的子像素,也就是说,第一像素单元包括的多个子像素呈多合一的形式,共同构成六边形的第一像素单元。
43.由此,本技术实施例中,由于图像传感器中的像素阵列包括至少两个第一像素单元,每一个像素单元呈六边形且包括至少四个五边形的子像素,因此,一次曝光过程中,像素单元中的多个子像素可以输出多个感光值,由此得到不同或者相同曝光值的多张图像,继而完成hdr合成和多帧降噪功能,从而有效避免图像错位、拖影等现象的发生,同时可以提升图像传感器的分辨率和感光能力,实现动态范围的扩展,提升了成像质量。
44.本技术的一些实施例中,第一像素单元包括四个呈五边形的子像素,四个呈五边形的子像素包括以下三种子像素:红色子像素、绿色子像素和蓝色子像素。也就是说,第一子像素中的子像素均呈五边形,该五边形可为正五边形或非正五边形,并且子像素的数量为四个,第一像素单元包括红色子像素、绿色子像素和蓝色子像素三种子像素类型。由此,第一像素单元可以通过多个不同类型的子像素实现多种可见光波段的感光,并且子像素排布结构紧密合理,可以提高像素密度,继而提升感光度。
45.本技术的一些实施例中,第一像素单元包括一个红色子像素、两个绿色子像素和一个蓝色子像素,即总共四个子像素。可选地,两个绿色子像素相邻且红色子像素和蓝色子像素不相邻,或者,两个绿色子像素不相邻且红色子像素和蓝色子像素相邻。由此,本技术实施例中的r/g/b都可以实现加算处理,在较暗的拍摄环境进行拍摄时,加算处理可以进一步提升图像传感器的感光能力,从而提升夜拍效果。
46.本技术的一些实施例中,第一像素单元中的四个子像素的面积可以根据实际需求设计。可选地,可将两个绿色子像素的面积比例设计为1:2,由此,通过一次曝光,即可得到
比例为1:2的两个绿色子像素感光值,在此基础上,若再将像素电路中用于读取子像素对应的光电二极管的两个电容的容值比例设置为1:4,则最终可以得到1:8的两个绿色子像素感光值,由此可以进一步扩展图像的动态范围。
47.本技术的另一些实施例中,也可以根据拍照环境中红色、绿色、蓝色三种光谱的能量比例,把第一像素单元中的红色子像素、绿色子像素和蓝色子像素设计成能够直接感光到白平衡的面积配比。例如,拍照环境中红色、绿色、蓝色三种光谱的能量比为2:4:1,则可以将第一像素单元中的红色子像素、绿色子像素和蓝色子像素的面积设计为2:1:4,则第一像素单元中各子像素感光之后将直接得到1:1:1的rgb数据,后端的图像信号处理中可以不做自动跟踪白平衡处理,由此可以提升画质。
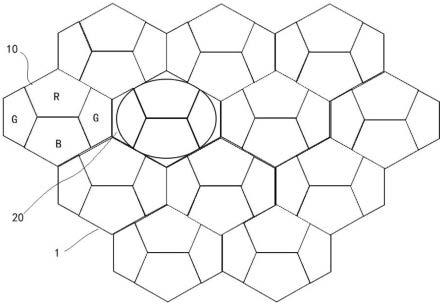
48.请参考图1和图2,图1为本技术实施例提供的第一像素单元的示意图之一,图2为本技术实施例提供的像素阵列的示意图之一。如图1所示,第一像素单元10包括一个红色子像素r、两个绿色子像素g和一个蓝色子像素b,每一个子像素均呈五边形,并且,两个绿色子像素g不相邻,而红色子像素r和蓝色子像素b相邻。如图2所示,多个第一像素单元10阵列分布,第一像素单元10之间紧密相贴,构成像素阵列1。
49.如图2所示,在一些实施例中,像素阵列1还包括第二像素单元20,第二像素单元20包括至少一对pd像素,所谓pd,即phase detection,pd对焦是通过相位检测来实现对焦,pd像素可以包括左(l)像素和右(r)像素,通过pd像素中的l像素和r像素的像素值,可以计算对焦区域的相位差(phase diff),从而实现相位对焦。可选地,第二像素单元20可以与第一像素单元10的形状相同,即同呈六边形,以便于第一像素单元10和第二像素单元20的排布。
50.请参考图3和图4,图3为本技术实施例提供的第一像素单元的示意图之二,图4为本技术实施例提供的像素阵列的示意图之二。如图3所示,第一像素单元10包括一个红色子像素r、两个绿色子像素g和一个蓝色子像素b,每一个子像素均呈五边形,并且,两个绿色子像素g相邻,而红色子像素r和蓝色子像素b不相邻。如图4所示,多个第一像素单元10阵列分布,第一像素单元10之间紧密相贴,构成像素阵列1。
51.如图4所示,在一些实施例中,像素阵列1还包括第二像素单元20,第二像素单元20包括至少一对pd像素,以实现图像传感器的对焦,pd像素的具体原理请参照上述实施例,此处不再赘述。可选地,第二像素单元20可以与第一像素单元10的形状相同,即同呈六边形,以便于第一像素单元10和第二像素单元20的排布。
52.本技术的一些实施例中,第一像素单元包括一个红色子像素、一个绿色子像素、一个蓝色子像素和一个第一子像素,其中,该第一子像素为白色子像素或红外子像素。也就是说,一种方案中,第一像素单元包括一个红色子像素、一个绿色子像素、一个蓝色子像素和一个白色子像素;而另一种方案中,第一像素单元包括一个红色子像素、一个绿色子像素、一个蓝色子像素和一个红外色子像素。由此,通过在第一像素单元中增加一个白色子像素或红外子像素,可以提升图像传感器在暗环境下的感光能力,并且w/ir和g通道都可以进行加算处理,可以进一步提升感光能力。
53.请参考图5和图6,图5为本技术实施例提供的第一像素单元的示意图之三,图6为本技术实施例提供的像素阵列的示意图之三。如图5所示,第一像素单元10包括一个红色子像素r、一个绿色子像素g、一个蓝色子像素b和一个第一子像素14,第一子像素14可以是白色子像素或者红外子像素。如图6所示,多个第一像素单元10阵列分布,第一像素单元10之
间紧密相贴,构成像素阵列1。
54.如图6所示,在一些实施例中,像素阵列1还包括第二像素单元20,第二像素单元20包括至少一对pd像素,pd像素的具体原理请参照上述实施例,此处不再赘述。可选地,第二像素单元20可以与第一像素单元10的形状相同,即同呈六边形,以便于第一像素单元10和第二像素单元20的排布。
55.本技术的另一些实施例中,第一像素单元包括六个呈五边形的子像素和一个呈六边形的子像素,其中,呈六边形的子像素的六条边分别与六个呈五边形的子像素的一条边重合。由此,采用这样的排布方式,可以使得第一像素单元中各子像素之间排列紧密,从而提升像素密度,最终提升图像传感器的感光度。
56.本技术的一些实施例中,第一像素单元还包括六个三角形的子像素,呈三角形的子像素位于相邻的两个呈五边形的子像素之间。也就是说,呈三角形的子像素的两条边分别与相邻的两个呈五边形的子像素的一条边重合。由此,采用这样的排布方式,可以进一步增加第一像素单元容纳的子像素的数量,进一步提升像素密度,并进一步提升图像传感器的感光度。
57.在一些实施例中,呈三角形的子像素可以设计为pd像素,以实现相位对焦功能,从而提升图像传感器的对焦能力。可选地,呈三角形的子像素可以为白色子像素。
58.本技术的一些实施例中,第一像素单元中呈六边形的子像素为白色子像素、绿色子像素、红外子像素中的任意一种,而第一像素单元中六个呈五边形的子像素包括红色子像素、绿色子像素、蓝色子像素、青色子像素、品红色子像素、黄色子像素中的至少两种像素类型。由此可以实现图像传感器色彩还原度、感光度的提升。
59.本技术的一些实施例中,在呈六边形的子像素为绿色子像素的情况下,第一像素单元中的六个呈五边形的子像素分别为三个红色子像素和三个蓝色子像素。通过这样的像素排布方式,可以实现横向加算处理,提升暗环境下的图像感光度。在该像素排布方式下,一次曝光过程中,可以读取到3个相同颜色(即红色或蓝色)子像素,由于同颜色的三个子像素的面积一样,在此基础上,通过将同颜色的三个子像素对应的光电二极管依次与像素电路中用于读取感光数据的电容连通,使得同颜色的三个子像素对应的光电二极管的电子依次进入到该用于读取感光数据的电容中,则最终可以得到1:2:3的感光值,即得到1:2:3的原始图像数据,由此可以扩展图像的动态范围,并且,同颜色的三个子像素的感光数据可以通过一个电容读取得到,因此可以方便像素电路的设计。
60.请参考图7和图8,图7为本技术实施例提供的第一像素单元的示意图之四,图8为本技术实施例提供的像素阵列的示意图之四。如图7所示,第一像素单元10包括一个呈六边形的绿色子像素g,三个呈五边形的红色子像素r和三个呈五边形的蓝色子像素b,并且,绿色子像素g的六条边分别与六个呈五边形的子像素的一条边重合。其中,可选地,同颜色的三个子像素可以成相邻设置。如图8所示,多个第一像素单元10阵列分布,第一像素单元10之间紧密相贴,构成像素阵列1。
61.如图8所示,在一些实施例中,第一像素单元10还包括六个呈三角形的pd像素16,用于相位对焦,pd像素16的具体原理请参照上述实施例,此处不再赘述。由此,本实施例的方案可以提升图像传感器的对焦能力。
62.本技术的一些实施例中,在呈六边形的子像素为白色子像素或者红外子像素的情
况下,第一像素单元中六个呈五边形的子像素包括两个绿色子像素、两个红色子像素和两个蓝色子像素,或者,第一像素单元中六个呈五边形的子像素包括一个红色子像素、一个绿色子像素、一个蓝色子像素、一个青色子像素一个品红色子像素和一个黄色子像素。
63.下面分别介绍上述各种情形。
64.在一些实施例中,第一像素单元中呈六边形的子像素为白色子像素时,第一像素单元中六个呈五边形的子像素具体可以为两个绿色子像素、两个红色子像素和两个蓝色子像素。在此像素排列方式下,第一像素单元中具有白色子像素,且面积最大,可以大幅提升像素传感器的感光能力、色彩捕捉能力和动态范围。
65.请参考图9和图10,图9为本技术实施例提供的第一像素单元的示意图之五,图10为本技术实施例提供的像素阵列的示意图之五。如图9所示,第一像素单元10包括一个呈六边形的白色子像素w,两个呈五边形的红色子像素r、两个呈五边形的绿色子像素g和两个呈五边形的蓝色子像素b,并且,白色子像素w的六条边分别与六个呈五边形的子像素的一条边重合。其中,可选地,同颜色的两个子像素可以关于第一像素单元的中心点成对称设置,例如,两个呈五边形的红色子像素r关于第一像素单元的中心点成对称设置。如图10所示,多个第一像素单元10阵列分布,第一像素单元10之间紧密相贴,构成像素阵列1。
66.如图10所示,在一些实施例中,第一像素单元10还包括六个呈三角形的pd像素16,用于相位对焦,pd像素16的具体原理请参照上述实施例,此处不再赘述。由此,本实施例的方案可以提升图像传感器的对焦能力。
67.在一些实施例中,第一像素单元中呈六边形的子像素为白色子像素时,第一像素单元中六个呈五边形的子像素具体可以为一个红色子像素、一个绿色子像素、一个蓝色子像素、一个青色子像素一个品红色子像素和一个黄色子像素。在此像素排列方式下,第一像素单元中具有白色子像素,且面积最大,可以大幅提升像素传感器的感光能力、色彩捕捉能力和动态范围;并且,由于cmy(即青色-品红色-黄色)是rgb(即红色-绿色-蓝色)的互补色,且具有比rgb更高的感光灵敏度,因此可以与rgb的色彩信息互相参考,从而提升图像传感器的色彩还原精准度;此外,若第一像素单元中的白色子像素可以实现分别曝光,则还可以进一步扩大图像传感器的动态范围。
68.请参考图11和图12,图11为本技术实施例提供的第一像素单元的示意图之六,图12为本技术实施例提供的像素阵列的示意图之六。如图11所示,第一像素单元10包括一个呈六边形的白色子像素w、一个呈五边形的红色子像素r、一个呈五边形的绿色子像素g、一个呈五边形的蓝色子像素b、一个呈五边形的青色子像素c、一个呈五边形的品红色子像素m、一个呈五边形的黄色子像素y,并且,白色子像素w的六条边分别与六个呈五边形的子像素的一条边重合。如图12所示,多个第一像素单元10阵列分布,第一像素单元10之间紧密相贴,构成像素阵列1。
69.如图12所示,在一些实施例中,第一像素单元10还包括六个呈三角形的pd像素16,用于相位对焦,pd像素16的具体原理请参照上述实施例,此处不再赘述。由此,本实施例的方案可以提升图像传感器的对焦能力。
70.在一些实施例中,第一像素单元中呈六边形的子像素为红外子像素时,第一像素单元中六个呈五边形的子像素具体可以为一个红色子像素、一个绿色子像素、一个蓝色子像素、一个青色子像素一个品红色子像素和一个黄色子像素。在此像素排列方式下,第一像
素单元中具有红外子像素,且面积最大,可以大幅提升像素传感器的感光能力、色彩捕捉能力和动态范围;并且,由于cmy(即青色-品红色-黄色)是rgb(即红色-绿色-蓝色)的互补色,且具有比rgb更高的感光灵敏度,因此可以与rgb的色彩信息互相参考,从而提升图像传感器的色彩还原精准度;此外,若第一像素单元中的红外子像素可以实现分别曝光,则还可以进一步扩大图像传感器的动态范围。
71.请参考图13和图14,图13为本技术实施例提供的第一像素单元的示意图之七,图14为本技术实施例提供的像素阵列的示意图之七。如图13所示,第一像素单元10包括一个呈六边形的红外子像素ir、一个呈五边形的红色子像素r、一个呈五边形的绿色子像素g、一个呈五边形的蓝色子像素b、一个呈五边形的青色子像素c、一个呈五边形的品红色子像素m、一个呈五边形的黄色子像素y,并且,红外子像素ir的六条边分别与六个呈五边形的子像素的一条边重合。如图14所示,多个第一像素单元10阵列分布,第一像素单元10之间紧密相贴,构成像素阵列1。
72.如图14所示,在一些实施例中,第一像素单元10还包括六个呈三角形的pd像素16,用于相位对焦,pd像素16的具体原理请参照上述实施例,此处不再赘述。由此,本实施例的方案可以提升图像传感器的对焦能力。
73.请参考图15和图16,图15为本技术实施例提供的第一像素单元的示意图之八,图16为本技术实施例提供的像素阵列的示意图之八。如图15和图16所示,本技术的一些实施例中,第一像素单元10包括六个呈五边形的子像素、一个六边形的子像素以及六个呈三角形的子像素,即一共包括13个子像素。具体地,呈六边形的子像素的六条边分别与六个呈五边形的子像素的一条边重合,呈三角形的子像素位于相邻的两个呈五边形的子像素之间,也就是说,呈三角形的子像素的两条边分别与相邻的两个呈五边形的子像素的一条边重合。其中,可见光波段被划分为13个子波段,而第一像素单元中的每一个子像素用于对应感光一个子波段的光,示例性地,可以将面积较大的子像素用于感光能量较弱的子波段的光,而将面积较小的子像素用于感光能量较强的子波段的光。本实施例中,采用上述像素排布方式,可以有效增强图像传感器的多光谱感光能力,更好地还原颜色,同时提高白平衡、自动曝光等算法的准确性。可以理解的是,第一像素单元中的子像素的数量与子波段的数量相同,各个子像素对应的感光子波段不同,第一像素单元中包含的子像素的数量可以根据实际需求确定。
74.可选地,可见光波段具体可以为400~780nm。
75.请参考图17至图19,图17为本技术实施例提供的红绿蓝三色的波段示意图之一,图18为本技术实施例提供的红绿蓝三色划分六个子波段的示意图,图19为本技术实施例提供的可见光波段划分为13个子波段的示意图。如图17所示,正常人眼能看到的图像由r、g、b三种光谱数据组成,在可见光波段中,包括红光波段、绿光波段和蓝光波段。进一步地,r光谱又可以被细分为2个或者多个,b光谱和g光谱同理,如图18所示,红光波段、绿光波段和蓝光波段分别被细分为2个更小的波段。进一步地,如图19所示,可以将可见光波段划分为13个子波段,使得第一像素单元中的每一个子像素对应感光一个子波段的光。
76.本技术的一些实施例中,第一像素单元呈正六边形,而第一像素单元包括六个呈正五边形的子像素和一个呈正六边形的子像素。由此,第一像素单元中各子像素排列整齐,而第一像素单元构成的像素阵列也排列整齐,结构紧凑,从而提升图像传感器的像素密度,
继而提升其感光能力。
77.下面介绍用于读取子像素对应的光电二极管的数据的像素电路结构。
78.请参考图20,图20为本技术实施例提供的像素电路结构的示意图之一。如图20所示,该像素电路结构被称作ppd(pinned photodiode,针扎光电二极管)pixel(像素)的像素结构。ppd pixel包括一个pd1的感光区,即光电二极管,以及4个晶体管(一个复位三极管rst,一个浮置开关tx1,一个行选择器set,以及一个信号放大器sf),所以也称为4t像素结构。ppd允许相关双采样(correlated double sample,cds)电路的引入,消除了复位引入的ktc噪声,mos管引入的1/f噪声和offset噪声。该像素电路结构的工作方式如下:
79.1.曝光。复位三极管rst和浮置开关tx1同时打开,以清空光电二极管pd1,然后两者断开开始曝光,光照射产生的电子-空穴对会因光电二极管pd1电场的存在而分开,电子移向n区,空穴移向p区。
80.2.复位。在曝光结束时,激活复位三极管rst,将电容fd1复位到高电平。
81.3.复位电平读出。复位完成后,读出电容fd1的复位电平,其中包含mos管的offset噪声,1/f噪声以及复位引入的ktc噪声,将读出的信号存储在第一个电容中。
82.4.电荷转移。激活浮置开关tx1,将电荷从感光区完全转移到电容fd1用于读出,这里的机制类似于ccd中的电荷转移。
83.5.信号电平读出。接下来,将电容fd1的电压信号读出到电容fd2,这里的电压信号包括:光电转换产生的信号,运放产生的offset,1/f噪声以及复位引入的ktc噪声。
84.6.信号输出。将存储在电容fd1和电容fd2中的信号相减(如采用cds,即可消除像素中的主要噪声),得到的信号在经过模拟放大,然后经过adc采样,即可进行数字化信号输出。
85.图20中,三极管dcg1是电容fd1和电容fd2的并联控制开关,假设将电容fd1和电容fd2的容值比例设置为1:4,则在两个绿色子像素的光电二极管中的数据时,可以通过控制三极管dcg1以实现光电二极管中的电子以1倍或4倍的电压读出,则通过一次曝光即可得到曝光比例为1:4的两张图像,实现了动态范围的扩展。若读取的两个绿色子像素的面积比例设计为1:2,则可以得到1:8的两个绿色子像素的感光值,进一步扩展了动态范围。
86.请参考图21,图21为本技术实施例提供的像素电路结构的示意图之二。如图21所示,与图20不同的是,用于读取数据的电容为一个,即电容fd1,同时,该像素电路结构中包括三个光电二极管,即光电二极管pd1、光电二极管pd2和光电二极管pd3,则在读取三个相同颜色、面积相同的子像素时,可以先打开浮置开关tx1,从电容fd1读取到光电二极管pd1的数据,再依次打开浮置开关tx2和浮置开关tx3,让光电二极管pd2和光电二极管pd3的电子也依次进入电容fd1,由于三个子像素的面积相同,则通过一次曝光即可得到1:2:3的三个原始图像数据,从而实现动态范围的扩展。并且,这种横向加算的布局可以很方便地设计出相应的读出电路。
87.总之,在本技术实施例中,图像传感器中的像素阵列包括至少两个第一像素单元,每一个像素单元呈六边形且包括至少四个五边形的子像素,由此,一次曝光过程中,像素单元中的多个子像素可以输出多个感光值,由此得到不同或者相同曝光值的多张图像,继而完成hdr合成和多帧降噪功能,从而有效避免图像错位、拖影等现象的发生,同时可以提升图像传感器的分辨率和感光能力,实现动态范围的扩展,提升了成像质量。
88.本技术实施例还提供一种摄像模组,所述摄像模组包括上述实施例中所述的图像传感器,且能达到相同的技术效果,为避免重复,这里不再赘述该图像传感器。
89.请参考图22和图23,图22为本技术实施例提供的摄像模组的爆炸图,图23为本技术实施例提供的摄像模组的结构示意图。如图22和图23所示,本技术实施例中的摄像模组200包括保护膜201、镜头202、音圈马达203、固定架204、滤光片205、图像传感器206、柔性电路板207和连接器208,其中,保护膜201用于保护镜头202等,镜头202用于聚光和对焦,镜头202被音圈马达203包裹固定,音圈马达203上下端和弹片铰接,在镜头202对焦时,音圈马达203通电产生电磁力,该电磁力与弹片的弹力保持平衡,音圈马达203的位置可以通过通电电流的大小来控制,进而将音圈马达203和镜头202移动到合适的对焦位置,实现自动对焦。固定架204用于固定音圈马达203等部件;滤光片205设置在镜头202和图像传感器206之间,用于对通过镜头202的光进行滤光,防止图像传感器产生伪色/波纹,以提高其有效分辨率和色彩还原性;图像传感器206用于感光,将光信号转换为电信号;图像传感器206与柔性电路板207连接,柔性电路板207与连接器208连接,继而进一步连接主板上的处理器等部件,实现感光数据的传输。
90.本技术实施例中的摄像模组的工作原理如下:
91.步骤101:通过音圈马达203将镜头202移动至合适的对焦位置;
92.步骤102:图像传感器206感光,将光信号转换为电信号;
93.步骤103:图像传感器206将电信号通过柔性电路板207等传输至处理器,通过图像信号处理,压缩生成图像,然后可用于保存或者预览。
94.在本技术实施例中,图像传感器中的像素阵列包括至少两个第一像素单元,每一个像素单元呈六边形且包括至少四个五边形的子像素,由此,一次曝光过程中,像素单元中的多个子像素可以输出多个感光值,由此得到不同或者相同曝光值的多张图像,继而完成hdr合成和多帧降噪功能,从而有效避免图像错位、拖影等现象的发生,同时可以提升图像传感器的分辨率和感光能力,实现动态范围的扩展,提升了成像质量。
95.本技术实施例还提供一种电子设备,所述电子设备包括上述实施例中所述的摄像模组,且能达到相同的技术效果,为避免重复,这里不再赘述。
96.本技术实施例中的电子设备可以是终端,也可以为除终端之外的其他设备。示例性的,电子设备可以为手机、平板电脑、笔记本电脑、掌上电脑、车载电子设备、移动上网装置(mobile internet device,mid)、增强现实(augmented reality,ar)/虚拟现实(virtual reality,vr)设备、机器人、可穿戴设备、超级移动个人计算机(ultra-mobile personal computer,umpc)、上网本或者个人数字助理(personal digital assistant,pda)等,还可以为个人计算机(personal computer,pc)、电视机(television,tv)、柜员机或者自助机等,本技术实施例不作具体限定。
97.需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者装置不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者装置所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括该要素的过程、方法、物品或者装置中还存在另外的相同要素。此外,需要指出的是,本技术实施方式中的方法和装置的范围不限按示出或讨论的顺序来执行功能,还可包括根据所涉及
的功能按基本同时的方式或按相反的顺序来执行功能,例如,可以按不同于所描述的次序来执行所描述的方法,并且还可以添加、省去、或组合各种步骤。另外,参照某些示例所描述的特征可在其他示例中被组合。
98.上面结合附图对本技术的实施例进行了描述,但是本技术并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本技术的启示下,在不脱离本技术宗旨和权利要求所保护的范围情况下,还可做出很多形式,均属于本技术的保护之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
