1.本发明涉及大数据处理领域,特别涉及一种基于边缘计算的柱状图识别方法、系统、存储介质及设备。
背景技术:
2.工业设备如plc这类一般采用显控ea系统进行sa编程,通过dde通信将数据转为柱状图并通过工业设备自带的屏幕进行显示。由于工业设备的特性,这类数据往往作为监控使用,若需要进行记录,则需要人工进行一一记录;当然,dde协议也可以进行编程,通过rslinux将dde协议传输回的数据进行解码并存储于该系统的文件内,但是使用dde协议需要工业设备厂家进行且费用不菲。现有的柱状图表识别方法主要有:dde编程,其原理为通过支持dde协议的工业设备获取当前监控数值,再通过连接的系统进行编程实现;plc专用解码模块,其原理为通过对应解码模块,对工业设备输出的监控信息进行自动解码与输出,再通过模块的数据线获取;物联网设别模块,其原理为计量模块改造,即安装在工业设备的数据输出端,计算出使用量,通过芯片将数值转成二进制数据并远程通讯到公网网关,完成数据采集。以上方法的缺点是:
3.1).改造费用昂贵,对于厂家提供的数据接口再进行二次开发费用昂贵;
4.2).维护成本过高,特殊的计量模块或解码模块在使用过程中会有一定程度的损坏,更换这类设备成本过高;
5.3).可替换性差,部分单位使用的工业设备年代久远,无这类解码设备或不支持编程协议,无法进行改造;
6.4).侵入性强,所有模块式的安装都需要对原有设备进行拆解、修改和并线,对原工作设备有一定的侵入性;
7.5).实施成本高,部分工业设备为生产的核心,若进行改造可能进行停机操作,会增高一定的生产成本。
技术实现要素:
8.本发明针对上述问题,提出了一种在不改变、无侵入、不影响现有工业设备工作的情况下进行柱状图表识别的方法,通过边缘计算对工业设备屏幕进行采集,利用边缘计算技术进行屏幕内柱状图的识别并推算最终数值,推算结果可存储于本地或回传应用/数据库服务器。识别过程不改变、无侵入、不影响现有工业设备,适用于智慧城市、智慧社区、智能制造、传统工业等需要低成本进行柱状图数据采集的场景。
9.本发明的第一方面,提供了一种基于边缘计算的柱状图识别方法,包括以下步骤:
10.调整摄像头位置,获取柱状图视频;
11.将柱状图视频进行解码获取柱状图片流,对柱状图片流逐帧解析,包括:
12.在柱状图片上绘制识别区域并标线;
13.进行柱状图片预处理,包括模糊处理、降噪处理、特征提取;
14.对预处理后的柱状图片进行识别,以标线位置为柱状图底部,通过机器视觉的霍夫直线检测功能检测出柱状图像中所有直线并按照检测出的直线长度进行过滤,选择最长的三条直线,过滤后按照纵坐标距离进行排列即距离图像顶部最远、数值最大的直线排在第一,取选择的三条直线根据图像顶部到直线的像素差计算得到柱状图数值;
15.对柱状图数值进行滤波后存储。
16.进一步的,方法还包括根据柱状图视频确定柱状图的图例信息,图例信息包括柱状图的参量最大数值和单位。
17.进一步的,取选择的三条直线根据图像顶部到直线的像素差计算得到柱状图数值具体公式为:
18.其中g(i)表示柱状图数值,hm(i)表示距离图像顶部最远的直线到图像顶部的像素差,h
t
(i)距离图像顶部第二远的直线到图像顶部的像素差,hn(i)表示距离图像顶部最近的直线到图像顶部的像素差。
19.本发明的第二方面,提供了一种基于边缘计算的柱状图识别系统,所述系统包括:
20.摄像单元,用于调整摄像头位置,获取柱状图视频;
21.解析单元,用于将柱状图视频进行解码获取柱状图片流,对柱状图片流逐帧解析,包括:
22.标识模块,用于在柱状图片上绘制识别区域并标线;预处理模块,用于进行柱状图片预处理,包括模糊处理、降噪处理、特征提取;识别模块,用于以标线位置为柱状图底部,通过机器视觉的霍夫直线检测功能检测出柱状图像中所有直线并按照检测出的直线长度进行过滤,选择最长的三条直线,过滤后按照纵坐标距离进行排列即距离图像顶部最远、数值最大的直线排在第一,取选择的三条直线根据图像顶部到直线的像素差计算得到柱状图数值;
23.滤波单元,用于对解析单元获得的柱状图数值进行滤波后存储。
24.进一步的,所述系统还包括通讯单元,用于对滤波单元存储的柱状图数值进行传输。
25.本发明的第三方面,提供了一种存储介质,该存储介质存储的计算机程序,可被一个或多个处理器执行,可用来实现如上所述的基于边缘计算的柱状图识别方法。
26.本发明的第四方面,提供了一种电子设备,包括存储器和处理器,所述存储器上存储有计算机程序,所述存储器和所述处理器之间互相通信连接,该计算机程序被所述处理器执行时执行如上所述的基于边缘计算的柱状图识别方法。
27.本发明提供的一种基于边缘计算的柱状图识别方法、系统、存储介质及设备,使用边缘计算技术进行柱状图表识别、检测;使用边缘计算完成视频采集、预处理、柱状图识别、结果推算、结果过滤和数据远传等一体化的服务。最终达到的有益效果:施工难度小,不影响生产;使用边缘计算技术进行柱状图表格识别,无需对原工业设备进行加装、更换计量模块,且施工、维护难度小,不需要进行停产、停业等操作;无破坏,不侵入,再重要工业设备进行对接时,无需对其进行破坏或并线条,被接入工业设备无感知;费用低,不需要进行dde协议编程、不需要部署识别服务器,也不需要工业设备支持,任意人眼可读柱状图均能进行识别。
附图说明
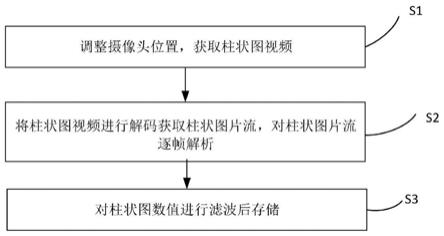
28.图1是本发明实施例的基于边缘计算的柱状图识别方法流程图;
29.图2是本发明实施例的基于边缘计算的柱状图解析方法流程图;
30.图3是本发明实施例的基于边缘计算的柱状图识别方法识别区域绘制和表现示意图;
31.图4是本发明实施例的基于边缘计算的柱状图识别方法计算示意图;
32.图5是本发明实施例的基于边缘计算的柱状图识别系统结构示意图;
33.图6是本发明实施例中的计算机设备的架构。
具体实施方式
34.为进一步对本发明的技术方案作详细说明,本实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式和具体的步骤。
35.本发明不影响现有工业设备工作的情况下进行柱状图表识别的方法,通过边缘计算对工业设备屏幕进行采集,利用边缘计算技术进行屏幕内柱状图的识别并推算最终数值,推算结果可存储于本地或回传应用/数据库服务器。识别过程不改变、无侵入、不影响现有工业设备,适用于智慧城市、智慧社区、智能制造、传统工业等需要低成本进行柱状图数据采集的场景。本发明提供的一种基于边缘计算的柱状图识别方法,如图1所示,包括以下步骤:
36.s1、调整摄像头位置,获取柱状图视频;
37.s2、将柱状图视频进行解码获取柱状图片流,对柱状图片流逐帧解析,如图2所示,包括:
38.s21、在柱状图片上绘制识别区域并标线;
39.s22、进行柱状图片预处理,包括模糊处理、降噪处理、特征提取;
40.s23、对预处理后的柱状图片进行识别,以标线位置为柱状图底部,通过机器视觉的霍夫直线检测功能检测出柱状图像中所有直线并按照检测出的直线长度进行过滤,选择最长的三条直线,过滤后按照纵坐标距离进行排列即距离图像顶部最远、数值最大的直线排在第一,取选择的三条直线根据图像顶部到直线的像素差计算得到柱状图数值;
41.s3、对柱状图数值进行滤波后存储。
42.在一些具体实施例中,在获取柱状图视频后,会根据柱状图视频确定柱状图的图例信息,图例信息包括柱状图的参量最大数值和单位。
43.进一步的,取选择的三条直线根据图像顶部到直线的像素差计算得到柱状图数值具体公式为:
44.其中g(i)表示柱状图数值,hm(i)表示距离图像顶部最远的直线到图像顶部的像素差,h
t
(i)距离图像顶部第二远的直线到图像顶部的像素差,hn(i)表示距离图像顶部最近的直线到图像顶部的像素差。
45.在一个具体实施例中,具体步骤如下:
46.步骤1、调整摄像头(支持rtsp流或usb直连两种)位置,确保采集质量,在配置文件内写入柱状图的最大数值、数字单位等柱状图图例信息,便于读取柱状图后进行数值转换;
47.步骤2、将采集的视频流进行解码获取图片,并通过opencv在解码后的图片上绘制识别区域及标线,结果如图3所示;
48.步骤3、对解码后的视频流逐贞解析,通过调用opencv.cvtcolor函数完成颜色转换,避免干扰、调用opencv.gaussianblur函数进行模糊(降低识别敏感度)和降噪(去除网络、其他设备等带来的电磁干扰)和调用opencv.adaptivethreshold函数完成二值化(特征提取)等图像预处理操作;
49.步骤4、以标线位置为柱状图底部,通过机器视觉的霍夫直线检测功能检测出图相中所有直线并按照检测出的直线长度进行过滤,选择最长的三条直线,过滤后再按照纵坐标距离(左上角为0)进行倒序排列即距离顶部最远,数值最大的直线排在第一,取前三条进行计算,最后获得柱状图数值,计算公式为示意图如图4所示;
50.步骤5、对柱状图数值利用数值滤波算法进行滤波操作,数值滤波算法是对大量的数值进行分类并计数,选择数量最多的分类,实现将不合理的值去除,包括但不限于如因光照、人影等影响步骤4输出的结果,导致出现的不合理数值、无法识别的数值或不符合设备运行均值波动的数值等;
51.在一个具体实施例中,对视频监控进行了长达10分钟的测试,识别结果80%出现了7811次,79%出现了393次,83%出现了1785次,81%出现了10次,82%出现了1次,经过滤波处理,则认为80%为准确的识别结果,因为出现次数最高。
52.步骤6、将步骤5得到的柱状图数据以文件流的方式存储于存储器之中,利用通讯模块进行数据远传;
53.以下,参照图3来描述根据本公开实施例的与图1所示的方法对应的系统,一种基于边缘计算的柱状图识别系统100,所述系统100包括:摄像单元101,用于调整摄像头位置,获取柱状图视频;解析单元102,用于将柱状图视频进行解码获取柱状图片流,对柱状图片流逐帧解析,包括:标识模块1021,用于在柱状图片上绘制识别区域并标线;预处理模块1022,用于进行柱状图片预处理,包括模糊处理、降噪处理、特征提取;识别模块1023,用于以标线位置为柱状图底部,通过机器视觉的霍夫直线检测功能检测出柱状图像中所有直线并按照检测出的直线长度进行过滤,选择最长的三条直线,过滤后按照纵坐标距离进行排列即距离图像顶部最远、数值最大的直线排在第一,取选择的三条直线根据图像顶部到直线的像素差计算得到柱状图数值;滤波单元103,用于对解析单元102获得的柱状图数值进行滤波后存储。除了这上述单元与模块以外,系统100还可以包括其他部件,系统100还包括通讯单元104,用于对滤波单元存储的柱状图数值进行传输。
54.一种基于边缘计算的柱状图识别系统100的具体工作过程参照上述一种基于边缘计算的柱状图识别方法的描述,不再赘述。
55.此外,本发明实施例的系统也可以借助于图4所示的电子设备的架构来实现。图4示出了该电子设备的架构。如图4所示,包括通讯组件201、输入/输出组件202、总线203、处理器204、存储器205等。处理器204执行如上所述的一种基于边缘计算的柱状图识别方法,存储器205可以存储电子设备处理和/或通信使用的各种数据或文件以及处理器所执行的程序指令。所接收的柱状图数值可以被进一步存储在存储器205或通过通信组件201发送。图4所示的架构只是示例性的,在实现不同的电子设备时,根据实际需要可调整图4中的一
个或多个组件。
56.本发明实施例也可以被实现为计算机可读存储介质。根据实施例的计算机可读存储介质上存储有计算机可读指令。当所述计算机可读指令由处理器运行时,可以执行参照以上附图描述的根据本发明实施例的基于边缘计算的柱状图识别方法。
57.本发明提供的一种基于边缘计算的柱状图识别方法、系统、存储介质及设备,使用边缘计算技术进行柱状图表识别、检测;使用边缘计算完成视频采集、预处理、柱状图识别、结果推算、结果过滤和数据远传等一体化的服务。最终达到的有益效果:施工难度小,不影响生产;使用边缘计算技术进行柱状图表格识别,无需对原工业设备进行加装、更换计量模块,且施工、维护难度小,不需要进行停产、停业等操作;无破坏,不侵入,再重要工业设备进行对接时,无需对其进行破坏或并线条,被接入工业设备无感知;费用低,不需要进行dde协议编程、不需要部署识别服务器,也不需要工业设备支持,任意人眼可读柱状图均能进行识别。
58.在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的步骤、方法不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种步骤、方法所固有的要素。
59.以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。