1.本发明属于传动装置信号分离方法技术领域,涉及一种基于积分改进广义互相关的传动装置信号分离方法。
背景技术:
2.传动装置把动力装置的动力传递给工作机构等设备,在各种机械或车辆上都能看到传动装置的身影,其中主要以做圆周运动的轴承等机构居多。由于设备工作的环境可能非常苛刻,提高了设备的故障率,影响作业的正常进行,为了保证机械运作正常,需要对其进行性能监测,以便及时发现问题,及时维修以恢复工作。通常可以使用特定的传感器来获取传动装置的声音信号或者振动曲线,但在一些特殊场景里,无法加装传感器,需要使用无接触的方式来进行监测。对于有多个传动装置的场景里,可以使用盲源分离技术来进行声音信号的分离,将多个传动装置的声音信号分离出来,用来进行状态监测。盲源分离能够在不确定混合信号混合过程及源信号的条件下,从观测到的混合信号中恢复出源信号的波形。盲源分离的“盲”主要有两点:源信号是未知的、并且信号的传输通道参数也是未知的。
3.盲源分离技术的起源可以追溯到20世纪80年代,先驱性的工作主要由jutten和herault完成,他们在美国举行的有关神经网络的会议中,基于反馈神经网络模型提出了盲源分离中的h-j学习算法,完成两个混叠源信号的分离,并且可以解决源信号数量及信道的不确定性,后来还有人设计出专用的cmos芯片来实现其算法。截止目前,国内外众多学者都对盲源分离这一技术有很深入的研究。如独立成分分析(independent component analysis,ica)法,只要恢复出混合信号各个信号之间的相互独立性就可以完成对源信号的分离。在ica理论的基础上,涌现了一大批优秀的盲源分离算法:可利用过采样将去卷积问题转换成瞬时问题,再利用传统ica方法进行分离;可采用ica对信号的小波分解进行正则化,用来寻找独立特征,进行小波ica;可使用约束ica算法,利用类牛顿学习的自适应解决方案来解决约束优化问题。此外,基于ica原理及非高斯性最大定点算法,fastica被提了出来,还可将盲源分离问题转化为对密度函数的估计,再进行研究。但上述算法都假设声音服从一定的分布,符合理想情况下的数学模型,但实际场景中难以满足这种假设,因此上述方法展现出的鲁棒性不够强。此外基于深度学习的盲源分离方法依赖于预先训练,无法即时应用,且分离效果十分考验网络的泛化性能,稳定性不是很好。
技术实现要素:
4.为解决上述技术问题,本发明的目的是提供一种基于积分改进广义互相关的传动装置信号分离方法。
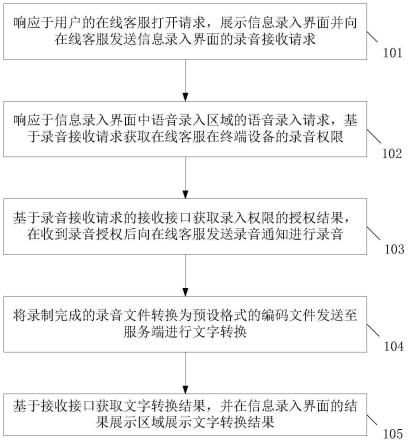
5.本发明提供一种基于积分改进广义互相关的传动装置信号分离方法,包括:
6.步骤1:进行原始双通道音频混合信号的采集并对混合信号进行预处理;
7.步骤2:进行双通道音频混合信号的时频分析,得到混合信号的时频信息,其中包括幅度谱和角度谱;
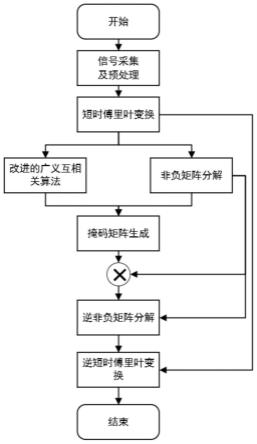
8.步骤3:使用积分改进广义互相关算法进行时延的估计,得到不同声源的时延;
9.步骤4:对幅度谱进行非负矩阵分解,得到字典矩阵和系数矩阵;
10.步骤5:将积分改进广义互相关算法与非负矩阵分解算法联合起来,生成掩码矩阵;
11.步骤6:将掩码矩阵与系数矩阵逐元素相乘,得到分离后的系数矩阵;
12.步骤7:进行逆非负矩阵分解,将字典矩阵和分离后的系数矩阵相乘,得到分离后的不同声源的幅度谱;
13.步骤8:将分离后的不同声源的幅度谱和角度谱相结合并进行逆短时傅里叶变换,得到分离后的不同声源的时域信息,完成分离。
14.在本发明的基于积分改进广义互相关的传动装置信号分离方法中,所述步骤1具体为:
15.步骤1.1:使用双通道的麦克风阵列进行原始音频混合信号的采集,采集时不同声源放在不同的方向,不同声源同时发出声音,模拟不同传动装置发出的声音;
16.步骤1.2:为了提高混合信号的信噪比,进而提升分离的质量,对原始音频混合信号进行预处理,采用多项式最小二乘法消除趋势项误差。
17.在本发明的基于积分改进广义互相关的传动装置信号分离方法中,所述步骤2具体为:
18.步骤2.1:对音频混合信号进行离散短时傅里叶变换:
[0019][0020]
其中,f为频率、t为时间、stft(f,t)为时频信息、k为积分操作所需的临时变量、x()为输入信号,g()为窗函数,具体采用hamming窗;
[0021]
步骤2.2:利用如下公式对时频信息进行分解:
[0022][0023]
其中,v
ft
为幅度谱,分为左通道的幅度谱v
lft
,右通道的幅度谱v
rft
;φ
ft
为角度谱。
[0024]
在本发明的基于积分改进广义互相关的传动装置信号分离方法中,所述步骤3具体为:
[0025]
步骤3.1:基本广义互相关算法定义为如下式:
[0026][0027]
其中,τ为时延、为互功率谱、ψ
ft
为频率加权函数、g
τt
为互相关函数;
[0028]
步骤3.2:使用积分法改进基本广义互相关算法,在通过公式(3)求得互相关函数g
τt
前,将互功率谱沿时间t一轴进行积分:具体为选择指定的窗口长度,在互功率谱的每一行上进行滑动窗口算法,计算窗口内的均值,并将这个值赋到窗口中心的元素上,再进行互相关函数g
τt
的计算;
[0029]
步骤3.3:将得到的互相关函数g
τt
沿时间t一轴求和,互相关函数便变为一维的时
延曲线使用峰值检测算法找出中的峰值,峰值的横坐标对应的时延即为求得的时延τs(s=1,2...n),s表示不同的声源,n为声源的个数。
[0030]
在本发明的基于积分改进广义互相关的传动装置信号分离方法中,所述步骤4具体为:
[0031]
步骤4.1:字典矩阵的初始化:从幅度谱v
ft
中选择若干个无穷范数最大的列向量,进行平均之后作为字典矩阵的列,列的无穷范数定义如下:
[0032][0033]
其中,||vec||
∞
即为向量vec的无穷范数,vi为向量的元素,len为向量的长度;
[0034]
步骤4.2:系数矩阵由随机初始化方式进行初始化;
[0035]
步骤4.3:字典矩阵w
fd
和系数矩阵h
dt
初始化后采用下列迭代公式进行迭代若干次,求出分解后的字典矩阵和系数矩阵:
[0036][0037][0038]
其中,为第m次迭代计算获得的字典矩阵,为第m次迭代计算获得的系数矩阵。
[0039]
在本发明的基于积分改进广义互相关的传动装置信号分离方法中,所述步骤5具体为:
[0040]
步骤5.1:使用非负矩阵分解生成的字典矩阵定义新的频率加权函数,如下式:
[0041][0042]
其中,为新的频率加权函数;
[0043]
步骤5.2:将新的频率加权函数代入到步骤3中的积分改进广义互相关算法定义式,实现了将积分改进广义互相关算法与非负矩阵分解相结合的目标,获得如下公式:
[0044][0045]
其中,为新的互相关函数;
[0046]
步骤5.3:掩码矩阵的含义为不同声源对应于不同的时延τs,将不同声源的时延分别代入到将该字典原子归因于值最大的源,便将该声源的掩码矩阵指定位置的元素设置为1,否则设置为0,掩码矩阵的定义如下式所示:
[0047][0048]
其中,m
dt
为掩码矩阵,s表示不同的声源。
[0049]
在本发明的基于积分改进广义互相关的传动装置信号分离方法中,所述步骤8具体为:
[0050]
将骤7中得到的不同源的幅度谱与步骤2中得到的角度谱相结合,并通过短时傅里叶逆变换进而得到分离后的不同源的时域信息,最终实现了将不同声源的信息分离出来,将不同传动装置的声音信号分离了出来,下式即为逆短时傅里叶变换公式:
[0051][0052]
其中,即表示分离出的不同传动装置的声音信号,为不同声源的幅度谱,φ
ft
为角度谱。
[0053]
本发明的一种基于积分改进广义互相关的传动装置信号分离方法,至少具有以下有益效果:
[0054]
(1)提出了积分改进广义互相关算法结合非负矩阵分解算法的盲源分离方法进行多传动装置声音信号分离,精度高,计算速度快,鲁棒性强;
[0055]
(2)使用积分法增强广义互相关算法,使得广义互相关的结果更精确,对时延估计的误差更小;
[0056]
(3)在求解字典矩阵和系数矩阵时,采用了新的非负矩阵分解算法的初始化方法,提升了分解速度,提高了分离的效果;
[0057]
(4)无需在传动装置上加装传感器,即可将不同传动装置产生的声音分离出来,适合在无法加装传感器的场景下应用,实现无接触获取传动装置的声音。
附图说明
[0058]
图1是本发明的一种基于积分改进广义互相关的传动装置信号分离方法的流程图;
[0059]
图2是本发明的积分改进广义互相关算法的流程图;
[0060]
图3a是实施例1中源信号1和本发明方法分离出的源信号1的时域波形对比图;
[0061]
图3b是是实施例1中源信号1和本发明方法分离出的源信号1的时频图谱对比图;
[0062]
图3c是实施例1中源信号2和本发明方法分离出的源信号2的时域波形对比图;
[0063]
图3d是实施例1中源信号2和本发明方法分离出的源信号2的时频图谱对比图;
[0064]
图4a是实施例1中源信号1和ica方法分离出的源信号1的时域波形对比图;
[0065]
图4b是是实施例1中源信号1和ica方法分离出的源信号1的时频图谱对比图;
[0066]
图4c是实施例1中源信号2和ica方法分离出的源信号2的时域波形对比图;
[0067]
图4d是实施例1中源信号2和ica方法分离出的源信号2的时频图谱对比图;
[0068]
图5是两声源数据集上实验效果对比图;
[0069]
图6是三声源数据集上实验效果对比图。
具体实施方式
[0070]
如图1所示,本发明的一种基于积分改进广义互相关的传动装置信号分离方法,包括:
[0071]
步骤1:进行原始双通道音频混合信号的采集并对混合信号进行预处理,具体为:
[0072]
步骤1.1:使用双通道的麦克风阵列进行原始音频混合信号的采集,采集时不同声源放在不同的方向,不同声源同时发出声音,模拟不同传动装置发出的声音;
[0073]
步骤1.2:为了提高混合信号的信噪比,进而提升分离的质量,对原始音频混合信号进行预处理,采用多项式最小二乘法消除趋势项误差。
[0074]
步骤2:进行双通道音频混合信号的时频分析,得到混合信号的时频信息,其中包括幅度谱和角度谱,步骤2具体为:
[0075]
步骤2.1:对音频混合信号进行离散短时傅里叶变换:
[0076][0077]
其中,f为频率、t为时间、stft(f,t)为时频信息、k为积分操作所需的临时变量、x()为输入信号,g()为窗函数,具体采用hamming窗;
[0078]
步骤2.2:利用如下公式对时频信息进行分解:
[0079][0080]
其中,v
ft
为幅度谱,分为左通道的幅度谱v
lft
,右通道的幅度谱v
rft
;φ
ft
为角度谱。
[0081]
步骤3:使用积分改进广义互相关算法进行时延的估计,得到不同声源的时延,积分改进广义互相关算法流程如图2所示。具体为:
[0082]
步骤3.1:基本广义互相关算法定义为如下式:
[0083][0084]
其中,τ为时延、为互功率谱、ψ
ft
为频率加权函数、g
τt
为互相关函数;
[0085]
步骤3.2:使用积分法改进基本广义互相关算法,在通过公式(3)求得互相关函数g
τt
前,将互功率谱沿时间t一轴进行积分:具体为选择指定的窗口长度,在互功率谱的每一行上进行滑动窗口算法,计算窗口内的均值,并将这个值赋到窗口中心的元素上,再进行互相关函数g
τt
的计算;
[0086]
步骤3.3:将得到的互相关函数g
τt
沿时间t一轴求和,互相关函数便变为一维的时延曲线使用峰值检测算法找出中的峰值,峰值的横坐标对应的时延即为求得的时延τs(s=1,2...n),s表示不同的声源,n为声源的个数。
[0087]
步骤4:对幅度谱进行非负矩阵分解,得到字典矩阵和系数矩阵,具体为:
[0088]
步骤4.1:字典矩阵的初始化:从幅度谱v
ft
中选择若干个无穷范数最大的列向量,进行平均之后作为字典矩阵的列,列的无穷范数定义如下:
[0089]
[0090]
其中,||vec||
∞
即为向量vec的无穷范数,vi为向量的元素,len为向量的长度;
[0091]
步骤4.2:系数矩阵由随机初始化方式进行初始化;
[0092]
步骤4.3:字典矩阵w
fd
和系数矩阵h
dt
初始化后采用下列迭代公式进行迭代若干次,求出分解后的字典矩阵和系数矩阵:
[0093][0094][0095]
其中,为第m次迭代计算获得的字典矩阵,为第m次迭代计算获得的系数矩阵。
[0096]
步骤5:将积分改进广义互相关算法与非负矩阵分解算法联合起来,生成掩码矩阵,具体为:
[0097]
步骤5.1:使用非负矩阵分解生成的字典矩阵定义新的频率加权函数,如下式:
[0098][0099]
其中,为新的频率加权函数;
[0100]
步骤5.2:将新的频率加权函数代入到步骤3中的积分改进广义互相关算法定义式,实现了将积分改进广义互相关算法与非负矩阵分解相结合的目标,获得如下公式:
[0101][0102]
其中,为新的互相关函数;
[0103]
步骤5.3:掩码矩阵的含义为不同声源对应于不同的时延τs,将不同声源的时延分别代入到将该字典原子归因于值最大的源,便将该声源的掩码矩阵指定位置的元素设置为1,否则设置为0,掩码矩阵的定义如下式所示:
[0104][0105]
其中,m
dt
为掩码矩阵,s表示不同的声源。
[0106]
步骤6:将掩码矩阵与系数矩阵逐元素相乘,得到分离后的系数矩阵;
[0107][0108]
步骤7:进行逆非负矩阵分解,将字典矩阵和分离后的系数矩阵相乘,得到分离后的不同声源的幅度谱;
[0109]
[0110]
步骤8:将分离后的不同声源的幅度谱和角度谱相结合并进行逆短时傅里叶变换,得到分离后的不同声源的时域信息,完成分离;具体为:
[0111]
将骤7中得到的不同源的幅度谱与步骤2中得到的角度谱相结合,并通过短时傅里叶逆变换进而得到分离后的不同源的时域信息,最终实现了将不同声源的信息分离出来,将不同传动装置的声音信号分离了出来,下式即为逆短时傅里叶变换公式:
[0112][0113]
其中,即表示分离出的不同传动装置的声音信号,为不同声源的幅度谱,φ
ft
为角度谱。
[0114]
下面结合实例对本发明进一步说明。
[0115]
实施例1:
[0116]
所述方法选择实验室现场采集的双声源音频混合信号,输出数据是分离后的单通道音频信号。
[0117]
首先进行音频混合信号的采集,使用麦克风阵列和两个扬声器,扬声器模拟的是传动装置发出的声音,即模拟了两个传动装置同时工作的场景。令扬声器同时播放音频,麦克风阵列进行采集。之后对程序进行参数设置,所述方法采用短时傅里叶变换进行时频分析,窗函数的宽度设置为1024,窗的重叠比例为87.5%。所述方法采用了广义互相关算法进行到达时间差的估计,将到达时间差划分为了128个区间;将非负矩阵分解中的字典原子的大小也即字典矩阵列的长度设置成了128,迭代法求解非负矩阵分解的迭代次数上限为100次;此外将麦克风间的距离如实设置成了8cm。
[0118]
图3a是实施例1中源信号1和本发明方法分离出的源信号1的时域波形对比图:图3b是是实施例1中源信号1和本发明方法分离出的源信号1的时频图谱对比图;图3c是实施例1中源信号2和本发明方法分离出的源信号2的时域波形对比:图3d是实施例1中源信号2和本发明方法分离出的源信号2的时频图谱对比图;
[0119]
根据图3a-3d可以看到本发明所提出的一种基于改进广义互相关的传动装置信号分离方法能够有效地将混合信号分离成若干种纯净的源信号,在时域和频域都具有优秀的分离能力,具有较好的鲁棒性。
[0120]
进一步的,保持所用音频数据集不变,采用ica方法进行对比实验,图4a是实施例1中源信号1和ica方法分离出的源信号1的时域波形对比图;图4b是是实施例1中源信号1和ica方法分离出的源信号1的时频图谱对比图;图4c是实施例1中源信号2和ica方法分离出的源信号2的时域波形对比图;图4d是实施例1中源信号2和ica方法分离出的源信号2的时频图谱对比图。
[0121]
图4a-4d的实验结果表明,采用ica方法对混合信号分离的结果较差,信噪比比较低,效果不如本发明提出的基于改进广义互相关的传动装置信号分离方法。通过与ica方法对比后发现,广义互相关经改进后与非负矩阵分解方法相结合形成的盲源分离方法可以有效解决本专利提出的传动装置信号分离问题,具有很大的现实意义与应用价值。
[0122]
实施例2:
[0123]
为了进一步证明本发明提出的基于改进广义互相关的传动装置信号分离方法的
先进性,采集多声源混合信号1.5小时,按照源的数量不同(二个声源或三个声源)分为两个音频数据集,每个音频数据集包括270段10秒钟的双通道音频信号。分别对本发明方法、ica方法、pca主成分分析法在上述两个音频数据进行实验,比较实验结果。其中使用了bss_eval这个盲源分离领域应用广泛的评价工具包进行本发明方法的定量评价,使用了三个指标分别是伪像率(source to artifacts ratio,sar)、失真率(source to distortion ratio,sdr)和干扰率(source to interferences ratio,sir)。
[0124]
根据图5、6可以看到本发明所提出的方法在两个音频数据集上的各种评价指标均有着优异的表现,在不同音频数据集上,各指标sar、sdr、sir均优于其他两种方法。综合两个数据集上的表现,本发明所设计的基于改进广义互相关的多传动装置信号分离方法在三种方法中的性能最优秀、鲁棒性最好。
[0125]
以上所述仅为本发明的较佳实施例,并不用以限制本发明的思想,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。