1.本发明涉及煤矿安全技术领域,具体为一种机械数码盘式顶板离层传感器。
背景技术:
2.在煤矿开采领域中,随着开采时间的增长,矿井巷道内的环境也会变得越来越复杂,煤炭塌方等事故时有发生,而在这种复杂环境下,为了保证安全生产的需要,常用到顶板离层传感器来实时监控矿井巷道顶板的位移状态。
3.发明人之间就针对这一问题在专利号为cn202021007690.0的实用新型专利中,就公开了一种可视度高的矿用光纤顶板离层传感器,该传感器是采用钢丝绳来带动滚轮机构,并在各级传动后,将形变结果反馈至表盘上,类似结构还有专利号为cn201920085616.1的一种矿用大量程光纤光栅无源可视顶板离层传感器,现有的这种顶板离层传感器,均是采用这种表盘式的结构,而这种的结构在进行读数时,根据读数的角度不同,读取的数据也是不同的,例如在下方仰视读数时,读取的数据是大于实际数据的,而这种细小的读数差异往往会造成重大的安全隐患。
4.针对上述问题,发明人大胆设想,并将与矿用领域或顶板离层传感器毫不相干的机械计数器应用至顶板离层传感器内,利用数码显示的方式来进行读数,大大提高了读数精度,而现有的机械计数器只存在单一计数功能,因此,在保证读数准确的基础上,发明人对顶板离层传感器的结构再次进行精心设计,使顶板离层传感器能够将顶板离层状态通过光纤光栅实时反馈至远程主机上,来进行顶板离层状态的实时监测,确保了矿井巷道的安全。
技术实现要素:
5.为解决上述现有顶板离层传感器为指针加表盘式,使在读数时存在较大的偏差,使得矿井巷道存在较大安全隐患的问题,本发明提供了一种机械数码盘式顶板离层传感器。
6.本发明技术方案如下:
7.一种机械数码盘式顶板离层传感器,包括主架,所述主架上设有动力模块、数显模块和传感模块,所述顶板离层传感器通过主架完成整体的安装固定,顶板离层状态能够通过动力模块传递至数显模块和传感模块,通过数显模块能够使井下工人对顶板离层状态进行观察,通过传感模块能够将顶板离层状态反馈至远程主机,实现对顶板离层状态的实时监控,确保了矿井巷道的安全。
8.如上所述的一种机械数码盘式顶板离层传感器,所述动力模块包括转动驱动轮,所述转动驱动轮上缠绕有钢丝绳,所述钢丝绳外端通过锚爪固定,将顶板离层状态通过钢丝绳反馈至转动驱动轮上,进而拉动转动驱动轮转动,所述数显模块包括若干数字码盘,若干数字码盘以预设的传动比依次传动连接,通过转动驱动轮能够带动其中一个数字码盘转动,进而带动其他数字码盘以预设的传动比加速或减速转动,使工人能够对矿井巷道的顶
板离层状态进行实时观察,而且这种数码式的设计方式,大大提高了读数准确性。
9.作为一种优选方案,所述数字码盘包括依次齿轮连接的第一数码盘、第二数码盘和第三数码盘,数字码盘上周向设有0-9十个数字,并将数字码盘周向分成十部分,所述转动驱动轮与第一数码盘齿轮连接,且所述第一数码盘、第二数码盘与第三数码盘的传动比为100:10:1,所述转动驱动轮在钢丝绳拉动下能够转动,进而带动第一数码盘转动,当所述第一数码盘转动一圈既360度时,第二数码盘转动一个数字既36度,第二数码盘转动一圈既360度时,第三数码盘转动一个数字既36度,在保证读数准确的前提下,增加了顶板离层传感器的测量范围。
10.进一步的,所述主架前端还设有读数窗口,通过读数窗口能够进行数字码盘的读数工作,进一步保证了读数的准确度。
11.如上所述的一种机械数码盘式顶板离层传感器,所述传感模块包括丝杆、丝母和悬臂梁,所述丝杆和主架转动连接,且与转动驱动轮传动连接,所述丝杆上设有丝母,且所述丝母通过限位装置与主架连接,且通过限位装置能够限制丝母的轴向转动,所述悬臂梁一端与主架连接,另一端与丝母外端面抵触,其上设有光纤光栅,通过所述转动驱动轮能够带动丝杆转动,进而带动丝母沿丝杆移动,所述丝母的位移变化能够带动悬臂梁产生弯曲变形,并通过光纤光栅将形变信息传递至远程主机,实现了顶板离层状态信息的远程监控,进一步确保了井下工作能够安全进行,而且这种丝母移动顶起悬臂梁的方式,相比于凸轮转动顶起悬臂梁的方式,传动更加精确,悬臂梁的形变量与丝母的位移量能够保持线性关系,确保了数据传递的准确性,并且能够根据传递的数据进行顶板离层状态的实时预测。
12.进一步的,所述主架包括固定板,所述固定板位于动力模块和数显模块之间,所述丝杆转动设于固定板一侧,所述悬臂梁一端与固定板远离丝杆一侧固定连接,另一端与丝母外端面活动抵触,保证悬臂梁具有较大的形变量。
13.需要说明的是,所述丝杆设于固定板靠近读数窗口一侧,所述悬臂梁与固定板的连接端位于固定板远离读数窗口一侧,这样一方面方便布置悬臂梁,同时在连接光纤光栅与悬臂梁及布置光纤光栅时能够更加的方便。
14.作为优选的,所述丝母包括柱形结构的主体,且通过主体与丝杆螺纹连接,所述丝母靠近固定板一侧的外圈向外延伸设有顶紧部,所述悬臂梁的活动端抵在顶紧部端面上,并能随着丝母的轴向移动,在顶紧部端面上滑动,丝母通过主体与丝杆连接,保证了丝母与丝杆的连接强度,进而保证了丝母在丝杆带动下具有精准的位移量,同时顶紧部的设置,保证了悬臂梁在发生较大形变时,其与丝母抵触一端能够始终与丝母接触。
15.进一步的,所述顶紧部上还设有滑孔,所述限位装置包括滑竿,所述滑竿平行于丝杆布置,其一端与固定板连接,所述丝母通过滑孔与滑竿滑动连接,需要说明的是,所述滑孔偏离丝杆的轴线布置,这样通过转动驱动轮转动带动丝杆转动,而丝母在滑竿作用下仅能够滑动,在丝杆作用下产生位移,使得转动驱动轮转动量与丝母位移量之间能够保持稳定关系,进而保证数据传递的准确性。
16.作为进一步优选的,所述悬臂梁中线过丝杆轴线且与丝杆轴线相垂直,使丝母沿丝杆轴向移动时,与悬臂梁之间具有稳定的抵触关系,同时使丝母的位移量与悬臂梁的形变量之间具有稳定的线性关系。
17.进一步的,所述悬臂梁与顶紧部接触一端设有呈弧形的触头,且所述触头的弧形
顶端与顶紧部相抵触,防止顶紧部外圈对悬臂梁产生作用,影响悬臂梁的形变效果。
18.如上所述的一种机械数码盘式顶板离层传感器,所述转动驱动轮通过连接轮与数显模块、传感模块传动连接,且所述转动驱动轮通过限位部件与连接轮连接,通过限位部件能够固定转动驱动轮与连接轮的相互转动。
19.具体来说,所述限位部件包括限位台,所述转动驱动轮与主架滑动连接,所述限位台设于连接轮靠近转动驱动轮一侧,所述转动驱动轮靠近连接轮一侧设有限位口,所述限位台能够在转动驱动轮的滑动作用下伸入或脱离限位口,这样设计,使在进行初始的绕线工作时,转动驱动轮能够脱离连接轮进行单独转动,绕线完成后再与连接轮进行配合,使装置使用起来更加的方便快捷。
20.进一步的,所述转动驱动轮与主架通过发条弹簧转动连接,所述转动驱动轮能够在钢丝绳作用下正向转动并带动数显模块、传感模块工作,且能够在发条弹簧作用下反向转动,使转动驱动轮具有自动复位功能,增加了装置的实用性。
21.进一步的,所述主架外侧还设有摇柄,所述摇柄与转动驱动轮连接且能够驱动转动驱动轮转动,完成绕线工作,使装置使用起来更加方便。
22.进一步的,为保证钢丝绳的出线方向固定,同时防止钢丝绳脱离转动驱动轮,所述转动驱动轮外侧还转动设有辅助线轮。
23.本发明的有益效果在于:
24.(1):本发明为一种机械数码盘式顶板离层传感器,采用钢丝绳带动转动驱动轮转动,进而带动数显模块工作,所述数显模块包括三级传动的三个数码盘,转动驱动轮转动带动数字码盘转动,进而将转动驱动轮的转动量通过数字码盘以数字的形式展示,使在进行读数时能够更加的准确,而且这种三级数字码盘传动的设计方式,增加了顶板离层传感器的测量范围和测量精度,使其能够实时、准确的向工人传递顶板离层状态信息;
25.(2):本发明转动驱动轮的转动还能够带动丝杆转动,使丝母在限位装置作用下沿丝杆滑动,进而顶起悬臂梁,所述悬臂梁上设有光纤光栅,通过光栅光纤能够将悬臂梁的形变信息传递至远程主机,实现对顶板离层状态的实时远程监控,进一步保证了井下工作的安全。
附图说明
26.通过阅读下文优选实施方式的详细描述,本技术的方案和优点对于本领域普通技术人员将变得清楚明了。附图仅用于示出优选实施方式的目的,而并不认为是对本发明的限制。
27.在附图中:
28.图1为实施例中顶板离层传感器的结构示意图;
29.图2为图1的俯视图;
30.图3为实施例中数显模块的结构示意图;
31.图4为图3的后视图;
32.图5为实施例中传感模块的位置示意图;
33.图6为图5的俯视图;
34.图7为实施例中动力模块的结构示意图;
35.图8为图7的俯视图;
36.图9为实施例中驱动组件的安装结构示意图;
37.图中各附图标记所代表的组件为:
38.1、主架;11、结构架;111、第一安装板;112、第二安装板;113、第三安装板;114、第四安装板;115、固定板;116、调节板;12、前板;13、后板;2、数显模块;21、第一码盘组;211、第一主动齿轮;212、第一数码盘;213、第一从动轮;214、第一转接齿轮;215、第一减速齿轮;22、第二码盘组;221、第二主动齿轮;222、第二数码盘;223、第二从动齿轮;224、第二转接齿轮;225、第二减速齿轮;23、第三码盘组;231、第三主动齿轮;232、第三数码盘;3、传感模块;31、调节齿轮;32、丝杆;33、丝母;34、安装台;35、悬臂梁;36、滑竿;4、动力模块;41、驱动组件;411、转动驱动轮;412、摇柄;413、连接轮;414、夹板;415、轴承;42、中间齿轮;43、辅助线轮;5、传动部件;51、主传动齿轮;52、传动轮轴;53、副传动齿轮。
具体实施方式
39.下面将结合附图更详细地描述本公开的示例性实施方式。需要说明,提供这些实施方式是为了能够更透彻地理解本公开,并且能够将本公开的范围完整的传达给本领域的技术人员,可以以各种形式实现本公开,而不应被这里阐述的实施方式所限制。
40.实施例
41.本实施例提供了一种机械数码盘式顶板离层传感器,参见图1-图9,包括主架1,所述主架1上设有动力模块4、数显模块2和传感模块3,所述顶板离层传感器通过主架1完成整体的安装固定,顶板离层状态能够通过动力模块4传递至数显模块2和传感模块3,通过数显模块2能够使井下工人对顶板离层状态进行观察,通过传感模块3能够将顶板离层状态反馈至远程主机,实现对顶板离层状态的实时监控,确保了矿井巷道的安全。
42.本实施例中,结合图2,所述主架1包括结构架11,所述结构架11包括竖直布置的若干板件,若干板件呈相互平行的线性间隙布置,且依次为第一安装板111、第二安装板112、第三安装板113、第四安装板114、固定板115及调节板116,所述板件均包括方形结构,相邻安装板之间、第四安装板114与固定板115之间、固定板115与调节板116之间的司建军通过连接柱连接,使结构架11形成一横置的多层结构,所述架构架前后两端分别设有前板12及后板13。
43.本实施例中,结合图3和图4,所述数显模块2包括以预设的传动比依次传动连接的第一码盘组21、第二码盘组22和第三码盘组23,三个码盘组分别包括第一数码盘212、第二数码盘222和第三数码盘232,所述第一数码盘212、第二数码盘222和第三数码盘232分别位于第三安装板113与第四安装板114、第二安装板112与第三安装板113、第一安装板111与第二安装板112之间,所述数码轴心两侧分别通过连轴与两侧的安装板转动连接,且三个数码盘的转动轴线共线。
44.进一步的,所述第一数码盘212靠近第四安装板114一侧的连轴贯穿第四安装板114且连接有第一主动齿轮211,且通过所述第一主动齿轮211能够驱动第一数码盘212转动,所述第一数码盘212靠近第三安装板113一侧的连轴上设有第一从动齿轮,所述第三安装板113上贯穿设有第一转接轴,所述第一转接轴靠近第一数码盘212的一端设有与第一从动齿轮啮合的第一转接齿轮214,另一端设有第一减速齿轮215。
45.进一步的,所述第二数码盘222靠近第三安装板113一侧的连轴上设有与第一减速齿轮215啮合的第二主动齿轮221,所述第二数码盘222靠近第二安装板112一侧的连轴上设有第二从动齿轮223,所述第二安装板112上贯穿设有第二转接轴,所述第二转接轴靠近第二数码盘222的一端设有与第二从动齿轮223啮合的第二转接齿轮224,另一端设有第二减速齿轮225。
46.进一步的,所述第三数码盘232靠近第二安装板112一侧的连轴上设有与第二减速齿轮225啮合的第三主动齿轮231。
47.进一步的,所述动力模块4与第一主动齿轮211连接,且能够带动第一主动齿轮211转动,进而带动第一数码盘212转动,第一数码盘212转动带动第二数码盘222转动,第二数码盘222转动带动第三数码盘232转动,需要说明的是,三个数码盘上均周向设有0-9十个数字,并将数码盘周向分成十部分,且所述第一数码盘212、第二数码盘222与第三数码盘232的传动比为100:10:1,既当所述第一数码盘212转动一圈既360度时,第二数码盘222转动一个数字既36度,第二数码盘222转动一圈既360度时,第三数码盘232转动一个数字既36度,这种数码式的设计方式,大大提高了读数准确性,而且在保证读数准确的前提下,大大增加了顶板离层传感器的测量范围。
48.进一步的,所述前板12上设有读数窗口,所述数码盘靠近前板12一侧伸出前板12的读数窗口布置,通过读数窗口能够进行数字码盘的读数工作,进一步保证了读数的准确度。
49.本实施例中,结合图5和图6,所述传感模块3包括丝杆32,所述丝杆32两端分别与第四安装板114和固定板115转动连接,且与固定板115连接一端贯穿固定板115设有调节齿轮31,所述丝杆32位于固定板115与第四安装板114之间的部分上螺旋连接有丝母33,所述丝母33上设有滑孔,所述丝杆32前方的第四安装板114与固定板115之间固定设有滑竿36,且所述滑竿36与丝杆32平行,所述滑竿36穿过滑孔布置,所述调节齿轮31与动力模块4连接,所述动力模块4能够带动调节齿轮31转动,进而带动丝杆32转动,在滑竿36作用下所述丝母33沿丝杆32产生位移,使得调节齿轮31转动量与丝母33位移量之间能够保持稳定关系,进而保证数据传递的准确性。
50.进一步的,所述丝杆32位于固定板115和第四连接板之间的前侧,所述固定板115靠近第四连接板一面的后侧还设有安装台34,所述传感模块3还包括悬臂梁35,所述悬臂梁35一端与安装台34固定连接,另一端与丝母33靠近第四安装板114一侧相接触,通过丝母33的位移能够顶紧悬臂梁35并使其产生形变,而安装台34和丝杆32分别位于前后两侧的设置方式,保证了悬臂梁35具有较大的形变量,同时,这样设置一方面方便布置悬臂梁35,同时在连接光纤光栅与悬臂梁35及布置光纤光栅时能够更加的方便。
51.作为优选的,所述丝母33包括柱形结构的主体,且通过主体与丝杆32螺纹连接,所述丝母33靠近固定板115一侧的外圈向外延伸设有顶紧部,所述悬臂梁35的活动端抵在顶紧部远离固定板115的端面上,并能随着丝母33的轴向移动,在顶紧部端面上滑动,丝母33通过主体与丝杆32连接,保证了丝母33与丝杆32的连接强度,进而保证了丝母33在丝杆32带动下具有精准的位移量,同时顶紧部的设置,保证了悬臂梁35在发生较大形变时,其与丝母33抵触一端能够始终与丝母33接触。
52.进一步的,所述光纤光栅一端与悬臂梁35连接,另一端连接至远程主机,所述悬臂
梁35在丝母33作用下产生的弯曲变形,能够通过光纤光栅将形变信息传递至远程主机,实现了顶板离层状态信息的远程监控,进一步确保了井下工作能够安全进行,而且这种丝母33移动顶起悬臂梁35的方式,相比于凸轮转动顶起悬臂梁35的方式,传动更加精确,悬臂梁35的形变量与丝母33的位移量能够保持线性关系,确保了数据传递的准确性,并且能够根据传递的数据进行顶板离层状态的实时预测。
53.需要说明的是,所述悬臂梁35中线过丝杆32轴线且与丝杆32轴线相垂直,使丝母33沿丝杆32轴向移动时,与悬臂梁35之间具有稳定的抵触关系,同时使丝母33的位移量与悬臂梁35的形变量之间具有稳定的线性关系,同时,所述悬臂梁35与顶紧部接触一端设有呈弧形的触头,且所述触头的弧形顶端与顶紧部相抵触,防止顶紧部外圈对悬臂梁35产生作用,影响悬臂梁35的形变效果。
54.本实施例中,所述传动模块与数显模块2之间通过传动部件5连接,所述传动部件5包括传动轮轴52,所述传动轮轴52两端分别于第四安装板114和固定板115转动连接,靠近第四安装板114一端设有与第一主动齿轮211相啮合的副传动齿轮53,与固定板115连接一端穿过固定板115且设有主传动齿轮51,这样使主传动齿轮51与调节齿轮31能够同时位于固定板115一侧,进而使动力模块4能够同时向数显模块2和传感模块3传递动力。
55.本实施例中,结合图7、图8和图9,所述动力模块4包括驱动组件41和中间齿轮42,所述驱动组件41运动能够带动中间齿轮42转动,并通过中间齿轮42向数显模块2和传感模块3传递动力。
56.进一步的,所述驱动组件41包括夹板414,所述夹板414竖直设于固定板115与调节板116之间且靠近固定板115布置,所述固定板115中部设有开口,开口内设有轴承415且通过轴承415连接有连接轮413,且所述连接轮413位于夹板414远离固定板115一侧,所述轴承415远离连接轮413一端设有中间齿轮42,所述中间齿轮42与调节齿轮31、主传动齿轮51啮合,通过连接齿轮转动,能够在轴承415作用下带动中间齿轮42转动,进而带动数显模块2和传感模块3工作。
57.进一步的,所述驱动组件41还包括转动驱动轮411,所述转动驱动轮411通过连接轴转动设于夹板414与调节板116之间,其外圈中部设有轮槽,所述轮槽内缠绕有钢丝绳,所述转动驱动轮411通过连接轮413与数显模块2、传感模块3传动连接,且所述转动驱动轮411通过限位部件与连接轮413连接,通过限位部件能够固定转动驱动轮411与连接轮413的相互转动。
58.具体来说,所述限位部件包括限位台,所述转动驱动轮411通过连接轴与主架1沿转动驱动轮411转动轴线方向滑动连接,所述限位台设于连接轮413靠近转动驱动轮411一侧,所述转动驱动轮411靠近连接轮413一侧设有若干个限位口,所述限位台能够在转动驱动轮411的滑动作用下伸入或脱离限位口,这样设计,使在进行初始的绕线工作时,转动驱动轮411能够脱离连接轮413进行单独转动,绕线完成后再与连接轮413进行配合,使装置使用起来更加的方便快捷,钢丝绳的外端通过锚爪固定,将顶板离层状态通过钢丝绳反馈至转动驱动轮411上,进而拉动转动驱动轮411转动。
59.进一步的,所述转动驱动滚轮的连接轴靠近调节板116一端贯穿至调节板116外侧,且连接有摇柄412,所述摇柄412与转动驱动轮411的连接轴连接且能够驱动转动驱动轮411转动,完成绕线工作,使装置使用起来更加方便,同时所述转动驱动轮411与主架1通过
发条弹簧转动连接,所述转动驱动轮411能够在钢丝绳作用下正向转动并带动数显模块2、传感模块3工作,且能够在发条弹簧作用下反向转动,使转动驱动轮411具有自动复位功能,增加了装置的实用性。
60.进一步的,为保证钢丝绳的出线方向固定,同时防止钢丝绳脱离转动驱动轮411,所述转动驱动轮411外侧还转动设有辅助线轮43。
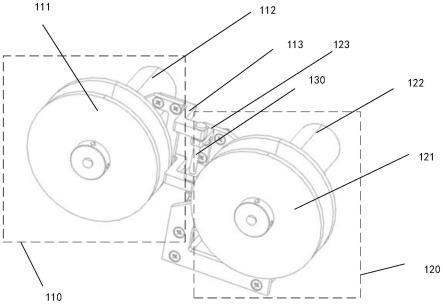
61.本实施例中,所述顶板离层传感器成对使用,其外部设有外壳,两个所述顶板离层传感器分别用于检测深基点与浅基点的离层状态信息。
62.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或增减替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。