1.本技术涉及养殖场智能设备领域,具体而言,涉及一种用于养殖场监测的轨道机器人、系统和方法。
背景技术:
2.在大型养殖场中,需要对养殖场环境进行监测,人工巡检造成整体维护成本加大,且难以对养殖场环境进行实时监测,通过使用轨道机器人替代人工进行养殖场巡检监控。现有技术中,采用刚性材料构建轨道,轨道质量较重,长度调节较麻烦,施工效率较低。
3.发明人发现,如果使用柔性材料构建轨道,虽然可以避免通过刚性材料构建轨道造成的相关问题,但是轨道机器人在柔性轨道上运动时,尤其在柔性轨道的弯道处,轨道机器人运行存在不平稳的问题,。
4.因此,针对轨道机器人在柔性轨道弯道上运行不稳定的问题,尚未存在有效的解决方案。
技术实现要素:
5.本技术的主要目的在于提供一种用于养殖场监测的轨道机器人、系统和方法,以解决现有技术中轨道机器人在柔性轨道弯道上运行不稳定的问题,提高轨道机器人在柔性轨道上运行的稳定性。
6.为了实现上述目的,本技术的第一方面,一种用于养殖场监测的轨道机器人,所述轨道机器人设置在轨道结构上,所述轨道机器人为用于养殖场监测的机器人,所述轨道机器人在所述轨道结构上滑动设置,以便所述轨道机器人在所述轨道结构上处于不同位置时对养殖场进行多位置监测,所述轨道结构为柔性材料构建的轨道结构,所述轨道机器人包括:
7.运动结构组件,包括第一运动结构组件和第二运动结构组件,所述第一运动结构组件和所述第二运动结构组件转动连接,所述轨道机器人通过所述运动结构组件与所述轨道结构活动连接;
8.固定结构组件,与所述运动结构组件固定连接,所述固定结构组件包括控制模块,用于与平台客户端通信连接;以及
9.功能组件,与所述固定结构组件通过可拆卸式连接,用于实现对所述养殖场的监测。
10.可选地,
11.所述第一运动结构组件包括第一运动连接部件和第一驱动部件,所述第一运动连接部件和所述第一驱动部件固定连接,所述第一驱动部件与所述曲轴转动连接;
12.所述第二运动结构组件包括第二运动连接部件和第二驱动部件,所述第二运动连接部件和所述第二驱动部件固定连接,所述第二驱动模块与所述驱动转动连接。
13.可选地,所述运动结构组件包括驱动部件、运动连接部件和折弯板结构部件,所述
运动连接部件与所述驱动部件的驱动电机固定连接,所述折弯板结构部件和所述驱动部件外罩固定连接,所述运行连接部件设置在所述驱动部件和所述折弯板结构部件之间。
14.可选地,所述固定结构组件包括:
15.电源模块,所述电源模块包括工作电源,电量检测元件和无线充电接收端,所述无线充电接收端设置在固定结构组件的侧面;
16.固定稳定结构部件,设置在所述固定结构组件的底部,当所述轨道机器人停止在预设充电位置时,所述充电稳定结构部件与充电仓活动连接。
17.可选地,所述充电仓与轨道结构固定连接,所述充电仓包括无线充电发射端和充电电源,所述无线充电发射端位于所述充电仓的充电侧,所述充电侧为充电仓水平方向上距轨道机器人的较近一侧;
18.当所述无线充电发射端与所述无线充电接收端相重合的面积大于预设重合面积时,所述充电仓对所述轨道机器人进行充电。
19.可选地,所述功能组件包括图像采集组件,所述图像采集组件包括:
20.摄像头,设置于所述轨道机器人的底部,用于对所述养殖场的图形信息采集;
21.加热部件,设置于所述摄像头结构的上方预设距离处,与所述摄像头结构固定连接,用于对所述摄像头结构的预设范围加热;
22.通信连接结构,与所述摄像头和所述加热部件通信连接,在所述图像采集组件表面设置有通信连接接口,所述通信连接接口为插拔结构。
23.可选地,所述轨道机器人包括配重模块,所述配重模块包括:
24.第一配重模块,所述第一配重模块设置在所述轨道机器人的第一侧面,所述轨道机器人的第一侧面位于所述轨道结构的轨道第一侧;
25.第二配重模块,所述第二配重模块设置在所述轨道机器人的第二侧面,所述轨道机器人的第二侧面位于所述轨道结构的轨道第二侧。
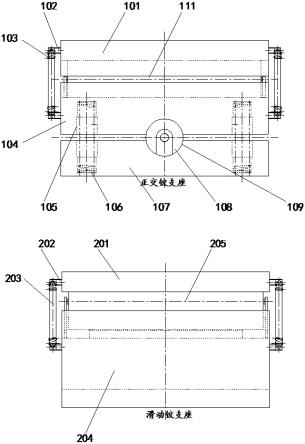
26.可选地,所述轨道机器人在柔性材料构建的所述轨道结构上运动,所述轨道结构与轨道支撑结构固定连接,所述轨道支撑结构用于对所述轨道结构进行支撑,以在轨道机器人在所述轨道结构上运动时,对所述轨道结构提供支撑力。
27.根据本技术的第二方面,提出了一种基于轨道机器人的养殖场监测系统,所述养殖场监测系统设置在所述养殖场中,用于对所述养殖场进行多位置监测,所述监测系统包括:
28.轨道机器人,与轨道结构活动连接,在所述轨道结构上滑动设置,以便对所述养殖场进行多位置监测;
29.所述轨道结构,固定设置在所述养殖场的建筑结构中,所述轨道结构为预设形状的闭环轨道结构并且所述轨道结构为柔性材料的轨道结构,以便为所述轨道机器人提供运行轨道;
30.轨道支撑结构,与所述轨道结构固定连接,固定设置在所述养殖场中,以便对所述轨道结构进行支撑。
31.根据本技术的第三方面,提出了一种基于轨道机器人的养殖场监测方法,通过设置在养殖场中的轨道机器人对所述养殖场进行多位置监测,所述轨道机器人设置在轨道结构上且所述轨道机器人为用于养殖场监测的机器人,所述轨道机器人在所述轨道结构上滑
动设置,以便所述轨道机器人在所述轨道结构上处于不同位置时对养殖场进行多位置监测,所述轨道结构为柔性材料构建的轨道结构,所述轨道机器人包括运动结构组件、固定结构组件和功能组件,其中,所述运动结构组件包括第一运动结构组件和第二运动结构组件,所述第一运动结构组件和所述第二运动结构组件转动连接,所述轨道机器人通过所述运动结构组件与所述轨道结构活动连接;所述固定结构组件与所述运动结构组件固定连接,所述固定结构组件包括控制模块,用于与平台客户端通信连接;所述功能组件与所述固定结构组件通过可拆卸式连接,用于实现对所述养殖场的监测,所述方法包括:
32.控制所述轨道机器人在所述轨道结构上分别处于多个位置;以及
33.控制所述轨道机器人在所述多个位置对所述养殖场进行多位置监测。
34.本技术的实施例提供的技术方案可以包括以下有益效果:
35.在本技术中,轨道机器人包括:运动结构组件,包括第一运动结构组件和第二运动结构组件,所述第一运动结构组件和所述第二运动结构组件转动连接,所述轨道机器人通过所述运动结构组件与所述轨道结构活动连接;固定结构组件,与所述运动结构组件固定连接,所述固定结构组件包括控制模块,用于与平台客户端通信连接;以及功能组件,与所述固定结构组件通过可拆卸式连接,用于实现对所述养殖场的监测。通过设置转动连接的第一运动结构组件和第二运动结构组件,使得轨道机器人在轨道弯道运动时,提高轨道机器人在柔性轨道弯道处运行的稳定性。
附图说明
36.构成本技术的一部分的附图用来提供对本技术的进一步理解,使得本技术的其它特征、目的和优点变得更明显。本技术的示意性实施例附图及其说明用于解释本技术,并不构成对本技术的不当限定。在附图中:
37.图1为本技术实施例提供的一种运动结构组件的结构示意图;
38.图2为本技术实施例提供的一种轨道机器人结构示意图;
39.图3为本技术实施例提供的一种功能模块的结构示意图;
40.图4为本技术实施例提供的一种充电仓的结构示意图;
41.图5为本技术实施例提供的一种轨道机器人的结构示意图;
42.图6为本技术实施例提供的一种轨道支撑结构的示意图;
43.图7为申请实施例中提供的一种监测触发模块的示意图;
44.图8为本技术实施例提供的一种轨道机器人的结构示意图。
45.运动结构组件100,第一运动结构组件110,第一运动连接部件111,第一驱动部件112,第一固定连接件113,第二运动结构组件120,第一运动连接部件121,第一驱动部件132,第一固定连接件123,曲轴130,折弯板结构部件140,固定结构组件200,固定稳定机构部件210,无线充电接收端220,功能组件300,摄像头310,加热部件320,通信连接结构330,充电仓400,无线充电发射端410,充电仓辅助固定部件420,配重模块500,第一配重模块510,第二配重模块520,轨道支撑结构600,第一支撑结构610,第一水平支撑结构611,第一竖向支撑结构612,第二支撑结构620,挂钩支撑结构621,圆管支撑结构622。
具体实施方式
46.为了使本技术领域的人员更好地理解本技术方案,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分的实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本技术保护的范围。
47.需要说明的是,本技术的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本技术的实施例。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
48.在本技术中,术语“上”、“下”、“左”、“右”、“前”、“后”、“顶”、“底”、“内”、“外”、“中”、“竖直”、“水平”、“横向”、“纵向”等指示的方位或位置关系为基于附图所示的方位或位置关系。这些术语主要是为了更好地描述本技术及其实施例,并非用于限定所指示的装置、元件或组成部分必须具有特定方位,或以特定方位进行构造和操作。
49.并且,上述部分术语除了可以用于表示方位或位置关系以外,还可能用于表示其他含义,例如术语“上”在某些情况下也可能用于表示某种依附关系或连接关系。对于本领域普通技术人员而言,可以根据具体情况理解这些术语在本技术中的具体含义。
50.此外,术语“安装”、“设置”、“设有”、“连接”、“相连”、“套接”应做广义理解。例如,“连接”可以是固定连接,可拆卸连接,或整体式构造;可以是机械连接,或电连接;可以是直接相连,或者是通过中间媒介间接相连,又或者是两个装置、元件或组成部分之间内部的连通。对于本领域普通技术人员而言,可以根据具体情况理解上述术语在本技术中的具体含义。
51.在本技术的一个可选实施例中,提供了一种用于养殖场监测的轨道机器人,轨道机器人设置在轨道结构上,轨道机器人为用于养殖场监测的机器人,轨道机器人在所述轨道结构上滑动设置,以便轨道机器人在轨道结构上处于不同位置时对养殖场进行多位置监测,轨道结构为柔性材料构建的轨道结构,轨道机器人包括运动结构组件100、固定结构组件200和功能组件300。
52.运动结构组件,包括第一运动结构组件110和第二运动结构组件120,第一运动结构组件和第二运动结构组件转动连接,轨道机器人通过运动结构组件与轨道结构活动连接;固定结构组件200,与运动结构组件固定连接,固定结构组件包括控制模块,用于与平台客户端通信连接;功能组件300,与所述固定结构组件通过可拆卸式连接,用于实现对所述养殖场的监测。
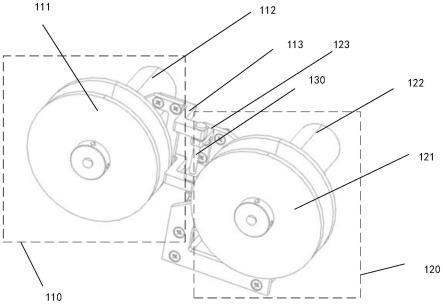
53.如图1所示,图1为本技术实施例提供的一种运动结构组件的结构示意图,运动结构组件包括第一运动结构组件110和第二运动结构组件120,第一运动结构组件和所述第二运动结构组件转动连接,轨道机器人通过运动结构组件与轨道结构活动连接。第一运动结构组件包括第一运动连接部件111和第一驱动部件112,第一运动连接部件和第一驱动部件通过第一固定连接件113固定连接,第一驱动部件与曲轴130转动连接;第二运动结构组件
包括第二运动连接部件121和第二驱动部件122,第二运动连接部件和所述第二驱动部件通过第二固定连接件123固定连接,第二驱动模块与所述曲轴转动连接。
54.第一运动连接件为滚轮结构,滚轮结构与轨道结构活动连接,滚轮结构参数与轨道结构参数对应,轨道结构参数包括轨道结构截面形状,轨道结构界面形状的参数,滚轮结构为材质可以为不锈钢、塑料材质、合金材料等中的一种或两种,滚轮结构满足预设滚轮硬度规则,滚轮结构的硬度为65-85a,滚轮结构的材质还可以为满足预设滚轮硬度规则的其他材料。
55.在本技术的另一可选实施例中,如图2所示,图2为本技术提供的一种轨道机器人结构示意图,运动结构组件包括驱动部件、运动连接部件和折弯板结构部件140,运动连接部件与驱动部件的驱动电机固定连接,折弯板结构部件和驱动部件外罩固定连接,运行连接部件设置在驱动部件和折弯板结构部件之间。折弯板结构组件为按照预设挂钩结构形成的折弯板结构组件,折弯板结构组件可以与轨道结构活动连接,通过设置折弯板结构组件,以实现轨道机器人产生脱轨情况时,折弯板结构组件通过挂钩结构勾住轨道结构,降低轨道机器人直接脱落至地面的情况,以降低用于轨道机器人维护的成本。
56.在本技术的另一可选实施例中,固定结构组件包括电源模块和固定稳定机构部件210,电源模块,电源模块包括工作电源,电量检测元件和无线充电接收端220,无线充电接收端设置在固定结构组件的侧面;固定稳定结构部件,设置在固定结构组件的底部,当轨道机器人停止在预设充电位置时,充电稳定结构部件与充电仓活动连接,固定稳定结构部件为多个滑轮部件,在固定结构组件的底部一侧按照预设间距均匀分布。
57.在本技术的另一可选实施例中,提供了一种功能模块的结构示意图,如图3所示,图3为本技术提供的一种功能模块的结构示意图,功能组件300包括图像采集组件,图像采集组件包括摄像头310、加热部件320和通信连接结构330,摄像头,设置于轨道机器人的底部,用于对养殖场的图形信息采集;加热部件,设置于摄像头结构的上方预设距离处,与摄像头结构固定连接,用于对摄像头结构的预设范围加热;通信连接结构,与摄像头和加热部件通信连接,在图像采集组件表面设置有通信连接接口,所述通信连接接口为插拔结构,举例说明,如摄像头通过usb数据线连接至核心板中通过程序控制其工作状态,加热片与usb数据线共有9根线束,可将该9根线束焊接至9芯航空插头中,航空插头通过与航空插头对应的航空插座插拔连接。在本技术实施例中,通过设置插拔结构的通信接口,通过通信连接件将轨道机器人的功能组件与固定结构组件中的控制模块通信连接,轨道机器人与固定结构组件可拆卸连接,实现轨道机器人的模块化设置,轨道机器人上的功能组件进行替换,提高了轨道机器人功能组件替换的效率,可实现多种养殖场环境中的多种信息采集,如,功能组件为图像采集模块,通过图像采集模块对养殖场中的图像信息进行采集,替换功能组件为气体监测模块,如气体传感器,通过气体监测模块对养殖场中的气体信息进行监测采集,轨道机器人可以实现多种养殖场信息的检测处理。
58.在本技术的另一可选实施例中,提供了一种充电仓的结构示意图,如图4所示,图4为本技术提供的一种充电仓的结构示意图,充电仓与轨道结构固定连接,充电仓400包括无线充电发射端410和充电电源,充电仓还包括充电仓辅助固定部件420,充电仓辅助固定部件为板结构,在所述板结构的两端,设置有预设角度的弯折,充电仓辅助固定部件420与固定稳定结构部件210活动连接,当轨道机器人移动至轨道结构上的预设充电位置处时,充电
仓辅助固定部件与固定稳定结构部件滑动连接,用于将无线充电发射端410和无线充电接收端230稳定设置,提高了轨道机器人进行充电的稳定性。
59.在本技术实施例中,通过在轨道机器人上设置的稳定固定结构部件和在充电仓上设置的充电仓辅助固定部件配合设置,轨道机器人在柔性材料构建的轨道结构上进行充电,提高了轨道机器人在轨道结构上充电时的稳定性,实现了提高轨道机器人充电准确性的技术效果。
60.在本技术的另一可选实施例中,轨道机器人还设置有配重模块,如图5所示,图5为本技术实施例提供的一种轨道机器人的结构示意图,配重模块500包括第一配重模块510和第二配重模块520,第一配重模块,第一配重模块设置在轨道机器人的第一侧面,轨道机器人的第一侧面位于轨道结构的轨道第一侧;第二配重模块,第二配重模块设置在轨道机器人的第二侧面,轨道机器人的第二侧面位于轨道结构的轨道第二侧,第一配重模块设置在运动结构组件中,第二配重模块设置在固定结构组件中,通过在轨道机器人上设置分布在轨道机器人两侧的配重模块,提高轨道机器人在柔性轨道运行时的稳定性。
61.在本技术的另一可选实施例中,轨道机器人在柔性材料构建的所述轨道结构上运动,轨道结构与轨道支撑结构固定连接,轨道支撑结构用于对轨道结构进行支撑,以在轨道机器人在轨道结构上运动时,对轨道结构提供支撑力,如图6所示,图6为本技术实施例提供的一种轨道支撑结构的示意图,轨道支撑结构600包括第一支撑结构610和第二支撑结构620,第一支撑结构,与轨道结构上的弯道位置处固定连接,且与养殖场中的第一预设固定位置处固定连接,用于对轨道结构提供用于水平固定和竖向固定的作用力;第一支撑结构包括第一水平支撑结构611和第一竖向支撑结构612,其中,第一水平支撑结构,与养殖场的第一预设固定位置处水平方向固定连接,用于在第一预设位置处为轨道结构提供第一水平固定作用力;第一竖向支撑结构,与养殖场的第一预设固定位置处竖向固定连接,用于在第一预设位置处为轨道结构提供第一竖向固定作用力。所述第一预设固定位置与所述轨道结构的第一固定连接位置对应,所述第一固定位置为所述轨道结构的弯道处。
62.第一水平支撑结构包括第一固定板结构和第二固定板结构,其中,第一固定板结构,与轨道结构通过第一连接方式固定连接,其中,第一连接方式为接触连接和扎带固定的连接方式,在第一固定板结构上设置有多个固定连接孔,设置扎带通过多个固定连接孔将第一固定板与轨道结构进行固定连接,用于为轨道结构提供水平方向上的拉伸的作用,降低轨道结构在水平方向上由于用于拉伸的作用力不足,轨道结构产生塌陷的情况。第二固定板结构,与第一固定板结构固定连接,第二固定板和第一固定板可以是焊接固定连接,可以是螺纹固定连接等,且第二固定板与第一养殖场水平方向固定结构固定连接,在第二固定板顶端设置有多个螺纹孔状结构,第二固定板与第一养殖场水平方向固定结构通过上述多个螺纹孔桩结构进行螺纹连接固定,其中,第一养殖场水平方向固定结构为在第一预设固定位置处的养殖场水平方向的固定结构,第一养殖场水平方向固定结构可以为养殖场建筑结构中水平方向上的固定结构。
63.第一竖向支撑结构与第一水平支撑结构中的第一固定板结构通过螺栓固定连接;第一竖向支撑结构为预设长度的方管;第一竖向支撑结构与第一养殖场竖向固定结构固定连接,其中,第一养殖场竖向固定结构为在第一预设位置处的养殖场竖向的固定结构,预设长度根据养殖场的建筑结构确定,第一养殖场竖向固定结构可以为养殖场建筑结构中竖向
的固定结构,预设长度可以根据轨道结构的水平高度与第一竖向固定结构的水平高度的差值确定。
64.第一固定板结构为刚性材料的圆弧状板结构,板结构的材质为钢、塑料和合金材料中的任意一种或多种材质的板结构,第一固定板结构的外表面设置有防腐涂层,第一固定板结构为q235a材质并进行表面发黑处理的扇形板;第一竖向支撑结构包括一个或多个方管结构,举例说明,第一竖向支撑结构与第一水平支撑结构通过第一水平支撑结构中的第一固定板固定连接,第一竖向支撑结构与第一水平支撑配合设置,在养殖场环境中的第一预设固定位置处提供用于竖向固定和水平方向固定的作用力,第一固定板与第一竖向支撑结构相对应,如第一竖向支撑结构中包括一个方管结构,方管结构在第一固定板的中间位置处进行固定连接;如第一竖向支撑结构中包括两个方管结构,两个方管结构分别在第一固定板的两端位置处与第一固定板固定连接;如第一竖向支撑结构中包含三个方管结构,多个方管结构在第一固定板上均匀分布,与第一固定板固定连接。
65.方管结构为厚度为2-5mm,截面为方形的方管结构,方管结构材质为钢、塑料和合金材料中的任意一种或多种材质的方管结构,如,方管结构为使用热镀锌板材质,厚度为4mm,横截面为长和宽为30mm的方形,轨道结构的水平高度与第一竖向固定结构的水平高度的差值为50cm,方管结构的长度为45cm。
66.第二支撑结构,与轨道结构上的直道位置处固定连接,且与养殖场中的第二预设固定位置处固定连接,用于对轨道结构提供用于竖向固定的作用力。第二支撑结构与养殖场的第二预设固定位置处竖向固定连接,用于在第二预设位置处为轨道结构提供第二竖向固定作用力;第二预设固定位置与轨道结构的第二固定连接位置对应,所述第二固定位置为所述轨道结构的直线弯道上的多个位置。
67.第二支撑结构包括挂钩支撑结构621和圆管支撑结构622,其中,圆管支撑结构,与轨道结构通过第二连接方式固定连接,其中,第二连接方式为接触连接和线夹固定的连接方式,通过线夹将圆管支撑结构与轨道结构进行固定连接,通过线夹架构与圆管支撑结构固定连接,确定圆管支撑结构的方向,避免圆管结构在轨道结构上产生绕轨道结构转动的情况;挂钩支撑结构,与圆管支撑结构接触连接,并与第二养殖场竖向固定结构接触连接,用于连接圆管支撑结构和第二养殖场竖向固定结构,以便为圆管支撑结构提供竖直向上的拉力,其中,第二养殖场竖向固定结构为第二预设位置处的养殖场竖向的固定结构。
68.根据圆管支撑结构的形状,对圆管支撑结构进行分类,圆管支撑结构包括第一圆管支撑结构、第二圆管支撑结构和第三圆管支撑结构等,其中,第一圆管支撑结构,按照第一预设形状设置的柔性圆管结构;第二圆管支撑结构,按照第二预设形状设置的柔性圆管结构;第三圆管支撑结构,按照第三预设形状设置的柔性圆管结构。柔性圆管结构为满足预设桡性规则的圆管结构,圆管结构的材质为不锈钢、塑料和合金材料中的任意一种或多种材质的圆管结构,如,圆管结构可以为直径为3-5mm之间、材质为304不锈钢的钢丝绳按照预设形状加工得到的圆管支撑结构。
69.第二支撑结构与轨道结构在直道结构处固定连接,在轨道结构上直道结构处的多个位置设置多个第二支撑结构,用于对轨道结构的直道结构提供多个用于竖向固定的作用力,圆管支撑结构按照预设支撑间距与轨道结构在多个位置处固定连接,如在轨道结构的直道结构上每间距1.5m设置一个第二支撑结构,为轨道结构提供用于竖向固定的作用力。
70.第二支撑结构还包括线夹结构,线夹结构与轨道结构固定连接,且与圆管支撑结构固定连接,通过螺纹固定连接将线夹结构和轨道结构以及圆管支撑结构固定连接,以便用于轨道结构与圆管支撑结构的固定连接;线夹结构为r型线夹,r型线夹为直径为6-10mm的线夹结构。
71.在本技术实施例中,通过设置轨道支撑结构对所述轨道结构进行固定支撑,解决了通过使用柔性材料构建轨道导致轨道机器人在柔性轨道上运行不平稳的问题,提高轨道机器人在柔性轨道上运行的稳定性,通过使用柔性材料构建轨道提高了养殖场轨道施工效率,也避免了机器人在柔性轨道上运行不平稳的情况,提高轨道机器人在柔性轨道上运行的稳定性。
72.在本技术的另一可选实施例中,提供了一种机器人轨道结构,轨道结构包括固定轨道结构,用于固定设置在养殖场,在养殖场中形成闭环轨道结构并且固定轨道结构为柔性材料的轨道结构;以及运动轨道结构,其中,轨道机器人与运动轨道结构固定连接,运动轨道结构与固定轨道结构活动连接以实现轨道机器人在固定轨道结构上沿固定轨道结构的轨道运动。固定轨道结构为轨道柔性件按照预设形状形成的闭环轨道结构,轨道柔性件的首端与尾端相连接;轨道柔性件按照预设形状形成闭环轨道结构,为固定轨道结构。轨道柔性件为满足预设刚性规则的柔性件,轨道柔性件为满足预设刚性规则的绳件结构,所述绳件结构的直径为5-10mm的绳件结构,绳件结构的材质为不锈钢、塑料、合金材料中的任意一种或多种材质的绳件结构。
73.在本技术实施例中,通过设置轨道结构中的固定轨道结构为柔性材料,使得轨道结构质量轻,施工难度降低,且可根据养殖场中的不同环境结构,进行不同长度及形状的轨道结构设置,实现了提高养殖场轨道施工效率的技术效果。
74.在本技术的另一可选实施例中,提供了一种基于轨道机器人的养殖场监测系统,养殖场监测系统设置在所述养殖场中,用于对养殖场进行多位置监测,监测系统包括:轨道机器人,与轨道结构活动连接,在轨道结构上滑动设置,以便对养殖场进行多位置监测;轨道结构,固定设置在养殖场的建筑结构中,轨道结构为预设形状的闭环轨道结构并且轨道结构为柔性材料的轨道结构,以便为轨道机器人提供运行轨道;轨道支撑结构,与轨道结构固定连接,固定设置在养殖场中,以便对轨道结构进行支撑。
75.在本技术的另一可选实施例中,提供了一种基于轨道机器人的养殖场监测系统,所述养殖场监测系统包括轨道机器人和监测触发模块,轨道机器人与轨道结构活动连接,用于在轨道结构上的不同位置对养殖场进行监测,包括用于养殖场信息监测的监测模块和的将采集到的信息传递给平台客户端的通信模块,其中,轨道结构为设置在所述养殖场中的轨道结构;监测触发模块,设置在轨道结构上的预设监测位置处,用于当轨道机器人运动到预设监测位置时,触发轨道机器人进行信息采集。
76.如图7所示,图7为申请实施例中提供的一种监测触发模块的示意图,监测触发模块设置有与其对应的电子标签,第一监测触发模块中设置有第一电子标签,第二监测触发模块中设置有第二电子标签,第一电子标签设置在轨道结构上的第一预设监测位置处,当轨道机器人的通过识别模块识别到第一电子标签时,触发轨道机器人的第一信息采集模块进行第一信息采集,第二电子标签设置在轨道结构上的第二预测监测位置处,当轨道机器人的通过识别模块识别到第二电子标签时,触发轨道机器人的第二信息采集模块进行第二
信息采集,第一监测位置和第二监测位置均位于轨道结构在水平面的投影与养殖场围栏存在重合的位置,举例说明,第一监测触发模块用于触发轨道机器人进行盘点信息监测,与第一监测触发模块对应的第一电子标签设置在与养殖场围栏中心位置处对应的轨道结构,第二监测触发模块用于触发轨道机器人进行测重信息监测,与第二监测触发模块对应的第二电子标签设置在养殖场围栏中预设测重位置对应的轨道结构,测重位置如食槽和/或水槽等。
77.在本技术实施例中,通过在目标监测位置设置监测触发模块,触发轨道机器人进行信息采集,提高轨道机器人巡检监测目标位置的准确性,实现了提高养殖场环境监测准确性的技术效果。
78.在本技术的另一可选实施例中,提供了一种用于养殖场监测的轨道机器人,如图8所示,图8为本技术实施例提供的一种轨道机器人的结构示意图,平台客户端与轨道机器人中的的核心控制板按照mqtt协议进行通讯,轨道机器人通过核心控制板,如选用核心控制板为rk3658,核心控制板接收平台客户端的信号,轨道机器人的核心控制板通过urat通信模块将指令发给外围板模块,如外围板模块为stm32,外围板模块控制驱动组件,如驱动电机,通过与驱动电机固定连接的滚轮结构带动轨道机器人在轨道结构上运动,轨道机器人中存储模块包括emmc存储模块和32位lpddr3存储模块,轨道机器人中还包括wifi接收模块,功能模块与核心控制板通信连接,功能模块上设置有用于采集目标监测信息的信息采集模块,如,设置摄像机模块进行图像信息采集,设置气体信息传感器进行气体信息监测,设置光照信息传感器进行光照信息监测等。
79.在本技术的另一可选实施例中,提供了一种基于轨道机器人的养殖场监测方法,通过设置在养殖场中的轨道机器人对养殖场进行多位置监测,轨道机器人设置在轨道结构上且轨道机器人为用于养殖场监测的机器人,轨道机器人在所述轨道结构上滑动设置,以便轨道机器人在轨道结构上处于不同位置时对养殖场进行多位置监测,轨道结构为柔性材料构建的轨道结构,轨道机器人包括运动结构组件、固定结构组件和功能组件,其中,运动结构组件包括第一运动结构组件和第二运动结构组件,第一运动结构组件和第二运动结构组件转动连接,轨道机器人通过运动结构组件与轨道结构活动连接;固定结构组件与运动结构组件固定连接,固定结构组件包括控制模块,用于与平台客户端通信连接;功能组件与固定结构组件通过可拆卸式连接,用于实现对养殖场的监测,方法包括:
80.控制所述轨道机器人在轨道结构上分别处于多个位置,其中,多个位置可以是轨道结构上连续的多个位置,也可以是轨道结构上离散的多个位置。
81.控制轨道机器人在多个位置对所述养殖场进行多位置监测。控制轨道机器人在轨道结构上的分别处于多个位置与控制轨道机器人在多个位置进行多位置监测的先后顺序不固定。
82.综上所述,在本技术中,设置轨道机器人包括:运动结构组件,包括第一运动结构组件和第二运动结构组件,第一运动结构组件和第二运动结构组件转动连接,轨道机器人通过运动结构组件与轨道结构活动连接;固定结构组件,与运动结构组件固定连接,固定结构组件包括控制模块,用于与平台客户端通信连接;以及功能组件,与固定结构组件通过可拆卸式连接,用于实现对养殖场的监测。通过设置转动连接的第一运动结构组件和第二运动结构组件,使得轨道机器人在轨道弯道运动时,提高轨道机器人在柔性轨道弯道处运行
的稳定性。
83.需要说明的是,在附图的流程图示出的步骤可以在诸如一组计算机可执行指令的计算机系统中执行,并且,虽然在流程图中示出了逻辑顺序,但是在某些情况下,可以以不同于此处的顺序执行所示出或描述的步骤。
84.显然,本领域的技术人员应该明白,上述的本技术的各单元或各步骤可以用通用的计算装置来实现,它们可以集中在单个的计算装置上,或者分布在多个计算装置所组成的网络上,可选地,它们可以用计算装置可执行的程序代码来实现,从而,可以将它们存储在存储装置中由计算装置来执行,或者将它们分别制作成各个集成电路模块,或者将它们中的多个模块或步骤制作成单个集成电路模块来实现。这样,本技术不限制于任何特定的硬件和软件结合。
85.以上所述仅为本技术的优选实施例而已,并不用于限制本技术,对于本领域的技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。