1.本发明涉及转子技术领域,尤其是一种非接触式无轴滚筒及其安装、控制方法。
背景技术:
2.滚筒结构被广泛应用于各类机械装置中,如洗衣机、传送装置,铡草机、采矿机、分离提取装置等。滚筒可分为有轴和无轴两种。
3.有轴滚筒的心轴会受到载荷作用,可能承受各种弯矩和扭矩作用,且轴作为旋转部件与固定部件间必然会产生压强,进而在转动时产生摩擦,从而会磨损部件,也会产生噪声。虽然装置在实际工作时会采取各种润滑措施,但是依然无法避免的会产生损耗以及噪声。因此一般对于轴的材料会进行限制,且需要经过一定的处理。目前对于传动滚筒的轴一般采用经过轧制或者锻造的碳素钢以及合金钢,对于某些特殊的轴要求可能会更高。轴的表面一般也需要热处理或者强化处理,以提高其力学性能和耐磨性。而且因为有轴,则必然会存在偏心的可能,偏心会加剧磨损,从而减少使用寿命。有轴滚筒主要存在以下缺点:对轴的材料有一定的要求;旋转部件与固定部件会发生摩擦,产生磨损和噪声;偏心问题无法避免,会使磨损和噪声问题更严重,减少使用寿命。
4.无轴滚筒因为没有轴的存在,因此不存在偏心问题,不用考虑轴的材料问题。但是无轴滚筒仍然会固定于装置上,驱动装置带动滚筒转动,如轮式传动通过类似齿轮传动的方式驱动滚筒,链式传动通过链条或者传动带的方式驱动滚筒,产生接触依然会导致磨损和噪声,从而减少使用寿命。
技术实现要素:
5.本技术人针对上述现有生产技术中的缺点,提供一种非接触式无轴滚筒及其安装、控制方法,在转子上布置永磁铁,在定子上布置永磁铁和电磁铁,同时在永磁铁位置布置力传感器。通过滚筒的目标状态和力传感器采集传输的数据,利用矢量控制系统,调整电磁铁的磁力,从而实现滚筒的启动-加速-稳定-减速-停止过程,并保持过程中定子与转子处于非接触状态。
6.本发明所采用的技术方案如下:
7.一种非接触式无轴滚筒,包括外筒、内筒,所述外筒包括外筒筒体、位于外筒筒体两端的外筒挡板;所述外筒筒体的弧形壁上设有外筒体磁铁,外筒挡板上设有外挡板磁铁;
8.所述内筒包括内筒筒体、位于内筒筒体两端的内筒挡板;所述内筒筒体的弧形壁上设有内筒体磁铁,内筒挡板上设有内挡板磁铁。
9.所述外筒体磁铁安装于外筒体的弧形壁内壁;内筒体磁铁安装于内筒体弧形壁的外表面上。
10.所述外筒挡板从外筒筒体处向圆心处垂直翻折;内筒挡板从内筒筒体处向外筒筒体一侧垂直翻折;外挡板磁铁、内挡板磁铁位于同一圆周线上。
11.所述外筒和内筒中,
12.对应转子作用的采用永磁铁;
13.对应定子作用的布置永磁铁和电磁铁,其中筒体上布置永磁铁,挡板上布置电磁铁;
14.对应电子作用的筒体上还设有力传感器。
15.所述外筒的一侧挡板可拆卸设置。
16.一种非接触式无轴滚筒的安装方法,包括如下步骤:
17.第一步:在内筒筒体、外筒筒体上对应布置磁铁和力传感器;
18.第二步:将第一步所得的预制内筒筒体和外筒筒体套接安装,再将外筒筒体的其中一侧外筒挡板封闭。
19.一种非接触式无轴滚筒的控制方法,包括如下步骤:
20.静止状态:根据力传感器所得参数,给电磁铁输出对应电流,控制电磁铁的磁力大小;此时磁力与转子的重力处于力平衡状态;
21.启动状态:启动加速,调整电磁铁的电流,控制电磁铁的磁力;此时磁力与转子的重力形成转子切向的驱动力,转子转动;
22.平稳状态:当转子的转速达到预期转速时,控制电磁铁的流量,调整磁力,使转子此时仅受到径向力;此时转子失去切向驱动力,保持静止稳定状态;
23.减速状态:改变电磁铁的电流,从而改变电磁铁的磁力,此时滚筒滚筒受到与自身转动方向相反的切向力,转子逐渐减速,直至停转;此时磁力与转子重力再次保持悬置平衡状态。
24.转子的永磁铁转动至与定子的永磁铁之间距离最近时,根据传感器采集到的力峰值的时间间隔,获知转子的转速。
25.内筒筒体、外筒筒体上的磁铁用于控制转子周向状态,实现转子转动、在竖直面内的运动状态;
26.外筒挡板、内筒挡板上的磁铁用于控制转子轴向状态,实现转子的轴向运动状态。
27.本发明的有益效果如下:
28.本发明结构紧凑、合理,操作方便,不需要将转子与其它结构进行固定,安装方便;
29.因为转子不与其它部件接触,因此没有摩擦,大大减小了运转过程中的噪声;且不易磨损结构,延长了使用寿命;
30.通过矢量控制,不仅能够实现转子周向转动,还能够实现转子在竖直方向上的上下运动、在同一竖直面内水平运动;还能够通过控制切向力的方向来控制转子的启停。
31.本发明还能够通过传感器所采集到的力峰值的时间间隔,得到转子转速参数。根据力传感器的数据,判断滚筒的状态,并调整电磁铁磁力大小,实现实时交互控制,保持过程中定子与转子处于非接触状态。
附图说明
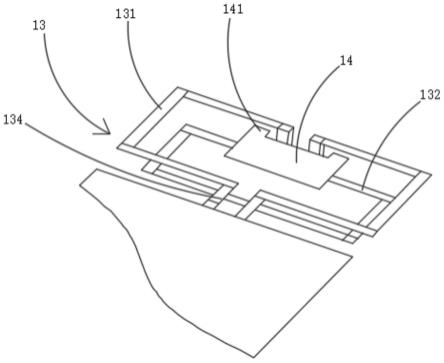
32.图1为本发明的非接触式滚筒整体结构示意图。
33.图2为本发明的非接触式滚筒内筒筒体结构示意图。
34.图3为本发明的非接触式滚筒外筒筒体结构示意图。
35.图4为本发明的非接触式滚筒带有内筒挡板的内筒筒体结构示意图。
36.图5为本发明的非接触式滚筒整体剖视图。
37.图6为本发明的非接触式滚筒整体纵剖图。
38.图7为本发明的工作原理流程图。
39.其中:1、外筒;2、内筒;
40.101、外筒筒体;102、外筒挡板;103、外筒体磁铁;104、外挡板磁铁;
41.201、内筒筒体;202、内筒挡板;203、内筒体磁铁;204、内挡板磁铁。
具体实施方式
42.下面结合附图,说明本发明的具体实施方式。
43.如图1-图7所示,本实施例的非接触式无轴滚筒,包括外筒1、内筒2,外筒1包括外筒筒体101、位于外筒筒体101两端的外筒挡板104;外筒筒体101的弧形壁上设有外筒体磁铁103,外筒挡板104上设有外挡板磁铁104;
44.内筒2包括内筒筒体201、位于内筒筒体201两端的内筒挡板202;内筒筒体201的弧形壁上设有内筒体磁铁203,内筒挡板202上设有内挡板磁铁204。
45.外筒体磁铁103安装于外筒1体的弧形壁内壁;内筒体磁铁203安装于内筒2体弧形壁的外表面上。
46.外筒挡板104从外筒筒体101处向圆心处垂直翻折;内筒挡板202从内筒筒体201处向外筒筒体101一侧垂直翻折;外挡板磁铁104、内挡板磁铁204位于同一圆周线上。
47.外筒1和内筒2中,
48.对应转子作用的采用永磁铁;
49.对应定子作用的布置永磁铁和电磁铁,其中筒体上布置永磁铁,挡板上布置电磁铁;
50.对应电子作用的筒体上还设有力传感器。
51.外筒1的一侧挡板可拆卸设置。
52.本实施例的非接触式无轴滚筒的安装方法,包括如下步骤:
53.第一步:在内筒筒体201、外筒筒体101上对应布置磁铁和力传感器;
54.第二步:将第一步所得的预制内筒筒体201和外筒筒体101套接安装,再将外筒筒体101的其中一侧外筒挡板104封闭。
55.本实施例的非接触式无轴滚筒的控制方法,包括如下步骤:
56.静止状态:根据力传感器所得参数,给电磁铁输出对应电流,控制电磁铁的磁力大小;此时磁力与转子的重力处于力平衡状态;
57.启动状态:启动加速,调整电磁铁的电流,控制电磁铁的磁力;此时磁力与转子的重力形成转子切向的驱动力,转子转动;
58.平稳状态:当转子的转速达到预期转速时,控制电磁铁的流量,调整磁力,使转子此时仅受到径向力;此时转子失去切向驱动力,保持静止稳定状态;
59.减速状态:改变电磁铁的电流,从而改变电磁铁的磁力,此时滚筒滚筒受到与自身转动方向相反的切向力,转子逐渐减速,直至停转;此时磁力与转子重力再次保持悬置平衡状态。
60.转子的永磁铁转动至与定子的永磁铁之间距离最近时,根据传感器采集到的力峰
值的时间间隔,获知转子的转速。
61.内筒筒体201、外筒筒体101上的磁铁用于控制转子周向状态,实现转子转动、在竖直面内的运动状态;
62.外筒挡板104、内筒挡板202上的磁铁用于控制转子轴向状态,实现转子的轴向运动状态。
63.本实施例的具体结构及工作过程如下:
64.如图1-图6所示,外筒挡板102、内筒挡板202均为中空结构,实际应用中,挡板也可以将其所在的筒体封上,作为全封闭结构。外筒筒体101的一侧挡板为可拆卸挡板,在安装时,将内筒2先放置于外筒1中,再将外筒挡板102进行安装。
65.非接触式无轴滚筒由内筒2和外筒1组成,根据功能需要,固定其中一个作为定子,另一个作为转子,根据滚筒结构、重量等参数,通过设计计算,在转子的筒体和挡板上布置永磁铁,在定子的筒体和挡板上布置永磁铁和电磁铁,同时在永磁铁处布置力传感器。
66.本实施例中,将外筒1作为转子,将内筒2作为定子进行举例说明。
67.因为磁力的大小与磁铁间的距离有关,因此可根据力传感器采集的数据判断定子与转子的相对关系,从而确定转子的状态。
68.如图7所示,通过控制电磁铁的电流改变磁力大小,控制转子的状态。外筒筒体101和内筒筒体201间的磁铁相互作用力主要用以控制转子周向的状态,实现转子的转动和转子的上下及左右运动,外筒挡板102和内筒挡板202间的磁铁相互作用力主要用以控制转子轴向的状态,可实现转子的前后运动。
69.定子上布置的电磁铁和力传感器与外界矢量控制系统连接,在不工作时,根据力传感器的数据,给电磁铁输出电流,控制电磁铁的磁力大小,使磁力与转子的重力保持悬置平衡状态。
70.当需要转子旋转时,启动加速,设置转子的转速,通过控制系统改变电磁铁的电流,改变电磁铁的磁力,根据力的矢量合成,可以使外筒筒体101受到切向的驱动力,从而改变外筒筒体101的受力状态,驱动外筒筒体101转动;在转动过程中,根据力传感器采集的数据,实时调整电磁铁的磁力大小,在转子旋转时,转子的永磁铁也会跟着旋转,与定子上永磁铁的距离会发生改变,当距离最近时,受到的力最大,根据传感器采集到的力峰值的时间间隔,即可知道转子的转速。
71.当转速达到设定的转速时,质量控制系统通过控制电磁铁的电流,改变磁力,使转子仅受到径向的力,使转子保持相对稳定状态。
72.需要减速时,矢量控制系统会改变电磁铁的电流,改变电磁铁的磁力,根据力的矢量合成,可以使滚筒受到与转动方向相反的切向阻力,从而阻止转子的转动。当转子停止转动,此时磁力与转子的重力保持悬置平衡状态。
73.通过外筒筒体101的目标状态和力传感器采集传输的数据,利用外界矢量控制系统,调整电磁铁的磁力,从而控制外筒筒体101的状态,同时根据力传感器的数据,判断外筒筒体101的状态,并调整电磁铁磁力大小,实现实时交互控制,保持过程中定子与转子处于非接触状态。
74.以上描述是对本发明的解释,不是对发明的限定,本发明所限定的范围参见权利要求,在本发明的保护范围之内,可以作任何形式的修改。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。