1.本发明涉及农业机器人领域,具体为一种基于农业除杂草的新型除草机器人。
背景技术:
2.中国是一个发展中的农业大国,农业问题一直是关系到中国社会经济发展的根本问题,而农业科技是目前我国农业增长最主要的推动力。在以后的农业发展中,广泛应用农业机器人,以技术替代资源,提高资源利用率和农业产出率,从而提高经济效益,将是我国现代农业发展的必然趋势。
3.现阶段农业工程领域的专家纷纷把研究重心从机械部分转向机器视觉、人工智能方面,力图解决农业机器人的智能问题。从目前的技术水平来看智能系统的发展还不够完善,很多农业机器人无法实现全自动作业,且由于体型较大、动作笨重会造成大量成本,因此如何以较低成本完成智能化作业是也一个值得我们探讨的问题。与此同时,续航问题也需要解决。
4.因此,一种高度自动化且功能齐全的农业新型除草机器人亟待研究。
技术实现要素:
5.为解决以上现有问题,本发明结合机械、视觉和人工智能,提供一种自动化程度高、经济、轻便的农业除杂草设备。本发明通过以下技术实现。
6.一种基于农业除杂草的新型除草机器人,包括机器人本体;
7.所述机器人本体包括机架、驱动装置、太阳能平台、双皮带对称传动机构、刀具连接架、末端执行机构及视觉传感器,所述机架由直线铝型材杆件搭建构成,并由承载太阳能装置和刀具连接架所用滑轨的平台、连接驱动装置的支架组成,所述驱动装置由步进电机和车轮组成。
8.进一步的,所述太阳能平台包括太阳能板、电子罗盘、太阳能板固定座、连接臂、连接主平台底座、第一电机以及第二电机;所述太阳能板固设在所述太阳能固定座的上方,所述第一电机固设在所述太阳能板固定座的下方,控制所述太阳能板以水平线为轴旋转;所述连接臂连接所述太阳能固定板和所述连接主平台底座,所述第二电机固设在所述连接主平台底座的下方,控制所述连接臂以竖直线为轴旋转;所述电子罗盘设在各所述连接主平台底座上。
9.进一步的,所述双皮带对称传动机构包括滑轮轨内道、皮带、皮带主动轮、皮带从动轮、主动轮力传递轴、主滑轮、副滑轮、从动轮、从动轮连接轴、第三电机、第四电机以及滑轮轨道外盖;所述滑轮轨内道与所述机架相连接,置于其底部;所述滑轮轨内道为相对中心面对称结构,与滑轮轨外道相连并对其它部件成包夹形式;所述第三电机与所述第四电机分别位于所述滑轮轨内道的一侧的一端和与所述第三电机相对中心轴对称的另一侧的另一端;所述皮带主动轮设有两个,分别与所述第三电机和第四电机相连接,用于带动所述皮带转动;所述皮带从动轮设有两个,分别置于与所述皮带主动轮相对中心面对称的另一侧;
所述皮带设有两条,与滑轮相连接,所述第三电机和第四电机旋转方向相同,使所述皮带反向旋转;所述主滑轮设有两个,分别靠近所述第三电机和所述第四电机,所述主滑轮为半周带轨道结构,以保证能在所述皮带中产生位移;所述副滑轮设有两个,且为光轮,分别置于两个所述主滑轮相对中心面对称的位置,起支撑作用;所述主动轮力传递轴连接所述主滑轮与副滑轮,使其同步转动。
10.进一步的,所述刀具连接架包括第一可折叠连接架、第二可折叠连接架、第一刀具连接杆、第二刀具连接杆、第一可旋转刀具连接杆、第二可旋转刀具连接杆、弹性夹紧装置、弹簧、连接杆滑轨及刀具连接装置、旋转电机、动滑轮、第一刀具横向延伸架、第二刀具横向延伸架以及连接台;所述第一可折叠连接架的数量不限,且为偶数个,与所述第二可折叠连接架通过铰链连接组成可折叠连接架,所述可折叠连接架以整体的中心轴为固定点,其两端可在一定程度内收缩;在机器人行进方向的同一平面内刀具连接杆设有两组,所述第一刀具连接杆、所述弹簧、所述弹性夹紧装置、所述第二刀具连接杆组成刀具连接杆,所述刀具连接杆与所述第一可折叠连接架、第二可折叠连接架的端点交接处相连;两个所述第二刀具连接杆分别与所述动滑轮以及定轮相连,滑轮在所述连接杆滑轨及刀具连接装置上运动,所述定轮固设在所述连接杆滑轨及刀具连接装置上;所述第一可旋转刀具连接杆、所述第二可旋转刀具连接杆、所述弹簧、所述弹性夹紧装置组成可旋转刀具连接杆,所述可旋转刀具连接杆的上端连接所述主动轮力传动轴或所述从动轮连接轴,并与所述第一可折叠连接架、第二可折叠连接架的中点交界处相连,其中内置所述旋转电机;所述第一刀具横向延伸架的两端各连接一所述第二刀具横向延伸架,所述第一刀具横向延伸架的中心固定并由电机带动旋转,所述第二刀具横向延伸架与所述连接杆滑轨及刀具连接装置的下部滑轨通过所述连接台连接,以同时控制两所述连接台在滑轨内对称方向运动相同位移。
11.进一步的,所述末端执行机构由刀具承载体、刀具、刀具承载体附带轮以及执行电机组成;所述刀具承载体顶端与所述连接杆滑轨及刀具连接装置或所述第二可旋转刀具连接杆相连,所述刀具与所述刀具承载体相连,所述刀具承载体附带轮置于所述刀具承载体的一端,所述执行电机置于所述刀具承载体的另一端。
12.本发明的有益效果:本发明所提供的新型除草机器人是机电一体化系统,它融合了机械、电子、计算机软硬件、控制、人工智能和造型技术等先进技术,该农业机器人符合教学使用的相关需求,能够完成按轨迹行走、识别杂草并高效除杂、最大程度吸收太阳能等自主功能,具有良好的性价比、开放性和可扩展性,同时可以根据需要方便地增、减功能模块进行改善提高,并能在一定程度上解决续航问题。
附图说明
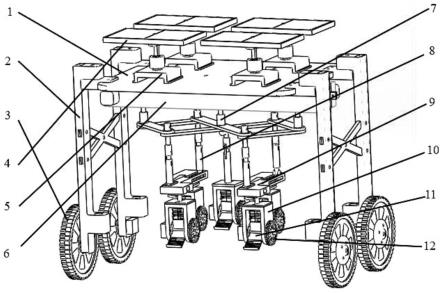
13.图1是本发明的结构示意图;
14.图2是本发明机构中太阳能平台的结构示意图;
15.图3是本发明机构中双皮带对称传动机构的结构示意图;
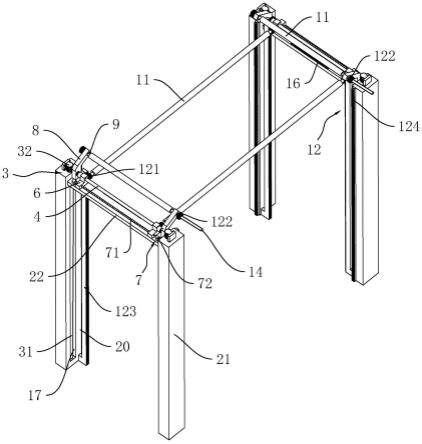
16.图4是本发明机构中刀具连接架的结构示意图;
17.图5是本发明机构中刀具横向延伸架的结构示意图;
18.图6是本发明机构中末端执行机构的结构示意图。
19.其中,1.机架;2.平台支架;3.车轮;4.太阳能板;5.连接主平台底座;6.双皮带对
称传动机构;7.可旋转刀具连接杆;8.可折叠连接架;9.连接杆滑轨及刀具连接装置;10.刀具承载体;11.刀具;12.刀具承载体附带轮;13.第一电机;14.第二电机;15.连接臂;16.滑轮轨道外盖;17.第三电机;18.滑轮轨内道;19.皮带从动轮;20.第四电机;21.皮带主动轮;22.主滑轮;23.从动轮;24.第一可折叠连接架;25.第二可折叠连接架;26.第一刀具连接杆;27.第二刀具连接杆;28.旋转电机;29.第一可旋转刀具连接杆;30.弹性夹紧装置;31.第二可旋转刀具连接杆;32.执行电机;33.延伸架滑轨;34.第一刀具横向延伸架;35.第二刀具横向延伸架;36.连接台。
具体实施方式
20.下面结合附图对本发明的技术方案作更为详细、完整的说明。
21.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
22.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
23.具体实施例1,如图1所示,本发明提供了一种基于农业除杂草的新型除草机器人,包括机架1、太阳能平台、双皮带对称传动机构6、刀具连接架、末端执行机构及视觉传感器等,机架1由直线铝型材杆件搭建构成,并由承载太阳能装置和刀具连接架所用滑轨的平台、连接驱动装置的支架,即平台支架2组成,驱动装置由步进电机和车轮3组成。
24.如图2所示,太阳能平台包括太阳能板4、电子罗盘、太阳能板固定座、连接臂15、连接主平台底座5、第一电机13以及第二电机14;太阳能板4固设在太阳能固定座的上方,第一电机13固设在太阳能板固定座的下方,控制太阳能板4以水平线为轴旋转;连接臂15连接太阳能固定板和连接主平台底座5,第二电机14固设在连接主平台底座5的下方,控制连接臂15以竖直线为轴旋转;
25.太阳能板4固定在连接主平台底座5上,通过太阳能平台的第一电机13、第二电机14控制太阳能板4的朝向;在连接主平台底座5内安置电子罗盘,确定方向后通过对比不同时间太阳所在的方向和高度来确定太阳能板4的朝向;该机器人安置四个太阳能平台,在空间允许的条件下汲取最多的太阳能以供机器人耗能;
26.如图3所示,双皮带对称传动机构6包括滑轮轨内道18、皮带、皮带主动轮21、皮带从动轮19、主动轮力传递轴、主滑轮22、副滑轮、从动轮23、从动轮连接轴、第三电机17、第四电机20以及滑轮轨道外盖16,双皮带对称传动机构6内,从动轮23的数量不限但为奇数组(图3为一组),中间一组固定且距两侧皮带主动轮21相同距离;两个电机17、20同步且相同旋向,故皮带旋向相反,因此两主滑轮22相对于固定的从动轮23成对称形式运动;主滑轮22采用半周带轨道,半周为光轮结构,副滑轮为全周光轮,故可保证主滑轮22带动主动轮力传递轴沿轨道平行运动,通过此传动机构保证刀具连接架可相对单一中心进行收缩;
27.如图4所示,第一可折叠连接架24数量不限,数量为偶数个,与第二可折叠连接架25共同构成可折叠连接架8,是改变不同刀具连接杆相互间距的主要结构;刀具连接杆分为行进于行内(有作物)和行进于行间(无作物)两种,第一种采用可旋转刀具连接杆7,即在可折叠连接架8的上部,也在与双皮带对称传动机构6连接部分的杆的内部安置旋转电机28,以此控制刀具11在行进到作物位置时通过旋转避让作物(此处旋转所产生的干涉已考虑在内);在行间刀具连接杆底部安装连接杆滑轨及刀具连接装置9,其中一组刀具连接杆固定于装置首部(机器人行进方向为首部),另一组刀具连接杆固定于动滑轮,此结构搭配可折叠连接架8实现不同刀具连接杆相互间距可改变;第一刀具连接杆26与第二刀具连接杆27相连接部位有弹簧装置(弹簧装置具有足够的弹性系数),两杆通过弹性夹紧装置30相连接,此装置可实现刀具连接杆在一定范围内的伸缩性,以适应振动及凹凸不平的地面;
28.如图5所示,第一刀具横向延伸架34中心与电机连接,两端各连接一个第二刀具横向延伸架35,第二刀具横向延伸架35与延伸架滑轨33通过连接台36连接,内附有动滑轮,由此可达到同时控制两连接台36在滑轨内对称方向运动相同位移,此数值可通过详细计算得出,利用此装置可对应可折叠连接架8延展的宽度调整刀具横向切割范围,从而实现自动化;
29.如图6所示,刀具承载体10顶部与连接杆滑轨及刀具连接装置9或可旋转刀具连接杆7相连接,底部圆弧半径略小于刀具承载体附带轮12的半径,此结构搭配图4中的弹簧装置,用以接触地面实现自适应调整刀具连接杆长度,避免刀具承载体10与地面接触造成磨损,同时减少径向力,对径向冲击起缓冲作用;刀具承载体10另一侧安置执行电机32,带动刀具旋转;刀具11为同向三叶互夹120
°
结构,通过计算回旋中心距地面高度可实现在避免多刀同时入地增大受力的同时提高作业效率,采用多阶细刃,以达到根除不同根深的杂草的目的,刀头刚性足够强且刀面较大,便于切入地面,侧面附有光滑半球,在刀具承载体10所开槽内滑动,这样的结构便于刀具的稳定;对应刀具横向延伸架所实现的自动化,刀具的横向宽度应根据最大横向位移设计,其中,第一可旋转刀具连接杆29、第二可旋转刀具连接杆31、弹簧、弹性夹紧装置30组成可旋转刀具连接杆7。
30.本发明可规划机器人行驶轨迹;随时间的改变太阳能板自动找寻太阳方位汲取太阳能以提高续航能力;根据同列作物种植距离确定垄内除杂草区域以避开作物;根据相邻列作物间距调整相邻列除草刀间距以适应不同垄间间距全面除垄间杂草;根据地面凹凸状况自适应调整连接架长度以减轻震动;识别到杂草后高效率进行对应位置除杂。其中驱动装置采用四驱,通过差速行驶改变方向。
31.本发明所提供的新型除草机器人是机电一体化系统,它融合了机械、电子、计算机软硬件、控制、人工智能和造型技术等先进技术,该农业机器人符合教学使用的相关需求,能够完成按轨迹行走、识别杂草并高效除杂、最大程度吸收太阳能等自主功能,具有良好的性价比、开放性和可扩展性,同时可以根据需要方便地增、减功能模块进行改善提高,并能在一定程度上解决续航问题。
32.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发
明中的具体含义。
33.在本发明中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度小于第二特征。
34.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”,“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
35.以上所述仅为本发明专利的较佳实施例而已,并不用以限制本发明专利,凡在本发明专利的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明专利的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。