1.本发明涉及医疗设备技术领域,具体涉及了一种介入超声穿刺遥控操作装置。
背景技术:
2.介入超声(interventional ultrasound)技术作为现代超声医学的一个分支,是在超声显像基础上为进一步满足临床诊断和治疗的需要而发展起来的一门新技术,是临床重要的微创诊断和治疗手段,可在实时超声引导下完成各种穿刺活检、抽液、注药等操作,且具有不开刀、不打孔、微创、安全等诸多优点。超声引导下的穿刺操作是其最核心的技术动作之一。
3.介入超声穿刺时需要同步进行超声检查,一般需要医生一手握持探头,实时观察超声仪器的显示屏幕,另一只手操作仪器操作面板。穿刺时需要握持超声探头,同时在超声引导下握持穿刺针具并完成进针、调整、出针等操作。大多数情况下医生需要扭转身体、颈椎、腰椎处于旋转状态,肩部、手部等多个关节、肌肉紧张,容易使操作稳定性下降,操作风险增加,同时身体长时间受到伤害。另外,穿刺进针的距离角度需要精确操作和良好的手感,一般在超声探头上安装穿刺支架固定进针的角度,也可无穿刺支架徒手穿刺,自由调整角度方向。穿刺进针可由单人双手完成,即一手操作探头,一手操作穿刺针,但对医生技术要求较高,仪器的显示屏幕与超声探头和穿刺针具分布于不同位置,需要躯体扭转、倾斜,穿刺时肢体的轻微晃动即可造成操作失败;穿刺进针也可由助手辅助,即一人专注于控制探头和操作仪器,观察超声图像,一人作为助手配合进针,但需要双方默契的配合,同时也增加了人手,对助手也有一定的技术要求。
技术实现要素:
4.本发明所解决的技术问题在于提供一种介入超声穿刺遥控操作装置,能够降低医生在穿刺过程中操作的难度,降低操作风险。
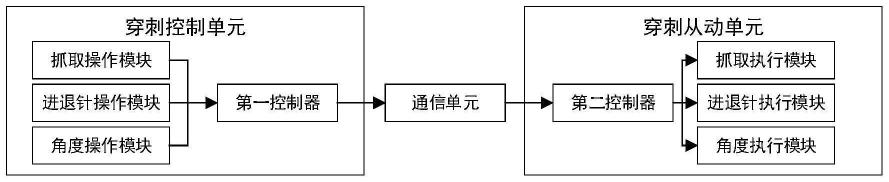
5.本发明提供的基础方案:一种介入超声穿刺遥控操作装置,包括穿刺控制单元、穿刺从动单元以及通信单元,所述穿刺控制单元和穿刺从动单元通过通信单元建立通信连接;
6.所述穿刺控制单元包括第一控制器和操作模块,所述操作模块的输出端与第一控制器的输入端电连接,所述操作模块用于发出操作指令,所述第一控制器用于通过通信单元将操作指令发送给穿刺从动单元,所述穿刺从动单元包括第二控制器和执行模块,所述第二控制器的输出端与执行模块的输入端电连接,用于接收操作指令,并根据接收到的操作指令,控制执行模块执行操作指令。
7.本发明的原理及优点在于:通过穿刺控制单元发出操作指令,由通信单元将操作指令传输给穿刺控制单元,穿刺控制单元接收到操作指令后,执行操作指令,完成对穿刺针具的控制,辅助医生进行穿刺操作。在实际操作过程中,将穿刺控制单元放置或集成于超声仪器的操作面板上,医生在完成穿刺时,只需要将穿刺针具固定在穿刺从动单元上,一手操
作超声仪器和穿刺控制单元,另一只手控制超声探头进行超声实时监视和穿刺的引导,在同步进行操作穿刺针具、观察超声仪器的显示屏幕、操作超声仪器时,无需扭转身体,颈椎、腰椎、关节、肌肉等得到保护,降低了医生的操作难度,缓解了医生的压力,同时也降低了操作风险。并且通过本发明只需一人便能够完成关键的穿刺进针操作,无需耗费更多的人手进行配合。
8.进一步,所述操作模块包括抓取操作模块,所述抓取操作模块用于发出抓取指令和释放指令;
9.所述执行模块包括抓取执行模块,所述抓取执行模块用于在接收到抓取指令时,对穿刺针具进行抓取,在接收到释放指令时,对穿刺针具进行释放。
10.由抓取执行模块对穿刺针具进行抓取,因此在具体实施时,无需医生手动对穿刺针具进行操作,医生只需要一手握探头,一手操作超声仪器的操作面板和穿刺控制单元即可,在穿刺过程中能够保持正常的直立坐姿。
11.进一步,所述操作模块包括进退针操作模块,所述进退针操作模块用于发出进针指令和退针指令;
12.所述执行模块包括进退针执行模块,所述进退针执行模块用于在接收到进针指令时,控制穿刺针具进针,以及在接收到退针指令时,控制穿刺针具退针。
13.通过进退针操作模块,发出进针指令和退针指令,使穿刺从动单元控制穿刺针具进行进针和退针,完成穿刺操作。
14.进一步,所述操作模块还包括角度操作模块,所述角度操作模块用于发出角度调节指令;
15.所述执行模块还包括角度执行模块,所述角度执行模块用于根据角度调节指令,调整穿刺针具的进针角度。
16.通过角度操作模块发出角度调节指令,使穿刺从动单元完成对穿刺针具进针角度的调整,当确定好安全的穿刺路径后,先调整好角度,再进行进针,整个过程都由穿刺从动单元执行操作指令完成,固定好穿刺针具后,医生便无需再对穿刺针具进行手动操作,整个穿刺过程中都能够保持直立的坐姿,无需频繁扭转身体。
17.进一步,所述穿刺控制单元还包括操作状态模块和显示模块;
18.操作状态模块,用于根据操作指令,确定穿刺针具的操作状态;
19.显示模块,所述显示模块用于显示穿刺针具的操作状态。
20.在进行进针、退针、角度调整的操作后,通过操作状态模块了解到进针的距离,以及针具的角度等操作状态信息,并通过显示模块进行显示,更加方便医生在实际操作过程中对于距离和角度进行了解。
21.进一步,所述穿刺控制单元集成在超声仪器的操作面板上。
22.将穿刺控制单元集成在超声仪器上,更加便于操作。
23.进一步,所述通信单元为无线通信模块。
24.通过无线网络的方式进行操作指令的传输。
25.进一步,所述穿刺从动单元还包括解除模块,所述解除模块的输出端与第二控制器的输入端电连接,所述第二控制器还用于根据解除模块发出的信号,控制抓取执行模块释放穿刺针具。
26.当出现意外时,医生能够通过穿刺从动单元上的释放模块,解除对穿刺针具的抓取,停止操作,或者是允许继续以手动的方式完成操作,确保安全。
27.进一步,所述穿刺控制单元还包括指令模拟模块、预警模块以及执行记录模块;
28.指令模拟模块,用于获取超声检测结果,并操作模块发出操作指令,模拟执行操作指令,判断操作指令是否会造成损害,生成模拟结果;
29.预警模块,用于在模拟结果为会造成损害时,发出提示;
30.执行记录模块,用于在模拟结果为在发出提示后,操作模块仍然发出相同的操作指令时,对执行模块的执行过程进行记录,在执行成功后将执行过程录入经验库;
31.指令模拟模块还用于根据经验库中的执行过程进行模拟。
附图说明
32.图1为本发明一种介入超声穿刺遥控操作装置实施例的逻辑框图。
具体实施方式
33.下面通过具体实施方式进一步详细说明:
34.实施例基本如附图1所示:
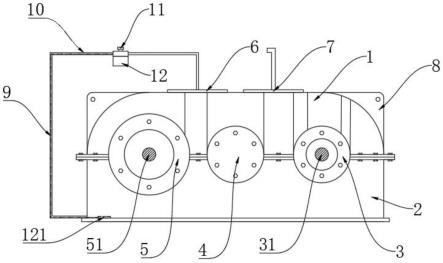
35.一种介入超声穿刺遥控操作装置,包括有穿刺控制单元、穿刺从动单元以及通信单元。穿刺控制单元和穿刺从动单元通过通信单元建立通信连接,在本实施例中,通信单元为蓝牙通信模块。穿刺控制单元集成在超声仪器的操作面板上,穿刺从动单元为附着在超声探头上的机械臂。
36.穿刺控制单元包括有第一控制器和操作模块,操作模块的输出端与第一控制器的输入端电连接,操作模块用于发出操作指令。第一控制器用于通过通信单元将操作指令发送给穿刺从动单元,穿刺从动单元包括有第二控制器、执行模块以及解除模块,第二控制器的输出端与执行模块的输入端电连接,第二控制器用于接收操作指令,并根据接收到的操作指令,控制执行模块执行操作指令,在本实施例中,第一控制器和第二控制器均为stm32系列单片机。
37.操作模块包括有抓取操作模块、进退针操作模块以及角度操作模块,抓取操作模块用于发出抓取指令和释放指令,进退针操作模块用于发出进针指令和退针指令,角度操作模块用于发出角度调节指令。在本实施例中,抓取操作模块、进退针操作模块以及角度操作模块集成为一个可旋转、可按压以及可拨动的圆形操作键。具体的,按压操作键,发出抓取指令和释放指令;顺时针旋转操作键,发出进针指令,逆时针旋转操作键,发出退针指令,并且根据操作键旋转的路程,调整进针指令和退针指令的控制量,即根据操作键旋转的路程,控制进针和退针的距离,在本实施例中,进针和退针的距离与操作键旋转的路程呈线性变化;拨动操作键发出角度调节指令,本实施例中,角度调节具体以档位调节的方式进行,即操作键能够拨动多个档位,每个档位发出不同角度的角度调节指令,在本实施例中,具体的档位有30度档位、45度档位以及60度档位,根据操作键拨动至的档位,发出对应的角度调节指令,例如当操作键拨动至30度档位时,则发出30度的角度调节指令。
38.通过操作模块发出操作指令后,第一控制器通过通信单元以无线网络的方式将操作指令发送给穿刺从动单元,第二控制器接收到操作指令后,控制执行模块执行操作指令。
具体的,穿刺从动单元附着在超声仪器的探头上的机械臂,机械臂机械臂上设有夹臂、直齿条和齿轮,夹臂设于直齿条上。抓取执行模块具体为机械臂上的夹臂,机械夹臂根据接收到的抓取指令或者释放指令,夹紧或者放松,当机械夹臂处于放松状态时,按下操作键,发出的是抓取指令,当机械夹臂处于夹紧状态时,按下操作键,发出的是释放指令。进退针操作模块具体为机械臂上的直齿条和齿轮,通过齿轮驱动直齿条直线移动,带动穿刺针具做直线运动,从而对进针指令和退针指令进行执行,即顺时针旋转操作键,控制穿刺针具直线进针,逆时针旋转操作键,控制穿刺针具直线退针,并根据操作键旋转的路程,控制进针和退针的距离。角度执行模块具体为控制机械臂旋转,当接收到具体的角度调节指令后,机械臂旋转对应的角度。
39.操作状态模块,用于根据操作指令,确定穿刺针具的操作状态。
40.显示模块,用于显示穿刺针具的操作转态。
41.当穿刺控制单元发出操作指令后,操作状态模块根据发出的操作指令,确定出穿刺针具的操作状态,具体的,操作状态模块将操作键发出的操作指令转换为电子信息,并利用显示模块将电子信息进行显示。例如通过操作键发出进针指令后,操作状态模块根据操作键旋转的路程,确定出穿刺针具进针的距离,并通过显示模块显示出穿刺针具进针的距离;当拨动操作键的角度档位后,操作状态模块根据操作键所处的档位,确定穿刺针具旋转的角度,并通过显示模块显示出穿刺针具旋转的角度。并且显示模块还能够以不同的颜色显示不懂的状态,便于医生进行观察。
42.解除模块的输出端与第二控制器的输入端电连接,控制器还用于根据解除模块发出的信号,控制抓取执行模块对穿刺针具进行释放。本实施例中,解除模块具体为设于机械臂上的解除按钮,当出现紧急情况,例如通信连接断开时,可通过机械臂上的解除按钮,对穿刺针具进行释放,继续以手动的方式完成穿刺操作。
43.具体实施过程如下:
44.使用时,将穿刺针具放置在夹臂上,按下操作键,使夹臂将穿刺针具夹紧。此时只需左手控制超声仪器的操作面板和穿刺控制单元,右手控制超声探头进行超声的实时监视和穿刺引导。在确定好安全进针路径后,首先左手拨动操作键的档位,调整好进针角度,右手固定好超声探头,并实时监视超声图像,左手顺时针旋转操作键即可。操作医生在操作过程中保持正常的直立坐姿即可,无需在操作穿刺针和操作超声仪器时扭转身体,降低了医生的操作难度,提高操作稳定性,降低操作风险。
45.实施例二
46.本实施例和实施例一的区别在于,所述穿刺控制单元还包括指令模拟模块、预警模块以及执行记录模块;
47.指令模拟模块,用于获取超声检测结果,并操作模块发出操作指令,模拟执行操作指令,判断操作指令是否会造成损害,生成模拟结果;
48.预警模块,用于在模拟结果为会造成损害时,发出提示;
49.执行记录模块,用于在模拟结果为在发出提示后,操作模块仍然发出相同的操作指令时,对执行模块的执行过程进行记录,在执行成功后将执行过程录入经验库;
50.指令模拟模块还用于根据经验库中的执行过程进行模拟。
51.具体的,指令执行模块从超声仪器处获取到超声检测的结果,并在接收到操作指
令时,通过计算机建模,对穿刺针具执行操作指令时的过程进行模拟。根据超声检测结果以及模拟过程,判断在执行操作指令时是否会对患者造成损害。若会造成损害,则通过预警模块发出提示,以提示医生。
52.当系统模拟后判断执行过程会造成损害,而医生坚持执行时,对医生的执行过程进行记录。当执行成功之后,将执行过程记录如经验库,从而对经验库进行完善。当系统认为执行会造成损害,而医生坚持执行,可能医生根据自身经验判断按照该操作指令执行,能够执行成功,系统计算出现误差。因此系统对执行模块的执行过程进行记录,当执行成功后,将执行过程保存在经验库中,在之后的模拟过程中根据经验库中的数据进行模拟,提高模拟准确度。
53.以上仅是本发明的实施例,方案中公知的具体结构及特性等常识在此未作过多描述,属领域普通技术人员知晓申请日或者优先权日之前发明所属技术领域所有的普通技术知识,能够获知该领域中所有的现有技术,并且具有应用该日期之前常规实验手段的能力,所属领域普通技术人员可以在本技术给出的启示下,结合自身能力完善并实施本方案,一些典型的公知结构或者公知方法不应当成为所属领域普通技术人员实施本技术的障碍。应当指出,对于本领域的技术人员来说,在不脱离本发明结构的前提下,还可以作出若干变形和改进,这些也应该视为本发明的保护范围,这些都不会影响本发明实施的效果和专利的实用性。本技术要求的保护范围应当以其权利要求的内容为准,说明书中的具体实施方式等记载可以用于解释权利要求的内容。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。