技术特征:
1.一种用于确定无人飞行器的目标方向的方法,包括:在计算机实现的显示器上提供图像,其中,所述图像是无人飞行器支撑的成像设备捕获的;当用户在所述图像上选择点时,获得选定点在所述图像上的位置;以及基于所述选定点在所述图像上的所述位置来确定所述目标方向;其中,所述无人飞行器被配置成以基本上直线的方式在所述目标方向上移动,并在所述目标方向上无限期地行进直到其遇到停止或改变准则。2.根据权利要求1所述的方法,其中,当无人飞行器处于定向模式中时,所述无人飞行器被配置成在所述目标方向上无限期地行进直到其遇到停止或改变准则。3.根据权利要求2所述的方法,其中,无人飞行器处于定向模式是由用户指定的。4.根据权利要求3所述的方法,其中无人飞行器处于定向模式是用户通过从多个可用模式中选择定向模式来指定的。5.根据权利要求4所述的方法,所述可用模式包括目标跟踪模式。6.根据权利要求1-5任一项所述的方法,其中所述停止或改变准则为方向变化、飞行限制、飞行模式变化、低电力供应或障碍物。7.根据权利要求1-5任一项所述的方法,其中将所述图像描绘成相对于所述无人飞行器而言的第一人称视角(fpv)。8.根据权利要求1-5任一项所述的方法,其中所述计算机实现的显示器是触摸屏设备。9.根据权利要求1-5任一项所述的方法,其中所述目标方向是在环境内限定的向量。10.根据权利要求1-5任一项所述的方法,还包括:将所述目标方向作为图形元素投影到所述计算机实现的显示器中的所述图像上。11.根据权利要求1-5任一项所述的方法,还包括:基于世界坐标系中的点来获得所述目标方向在图像坐标系中的向量,其中所述世界坐标系中的所述点与所述图像上的所述选定点相关联。12.一种用于确定无人飞行器的目标方向的装置,所述装置包括一个或多个处理器,所述一个或多个处理器单独地或共同地被配置用于:在计算机实现的显示器上提供图像,其中,所述图像是无人飞行器支撑的成像设备捕获的;当用户在所述图像上选择点时,获得选定点在所述图像上的位置;以及基于所述选定点在所述图像上的所述位置来确定所述目标方向;其中,所述无人飞行器被配置成以基本上直线的方式在所述目标方向上移动,并在所述目标方向上无限期地行进直到其遇到停止或改变准则。
技术总结
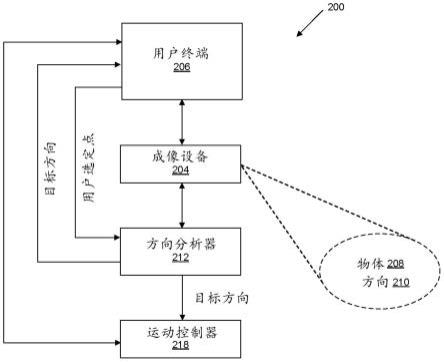
本文提供了用于确定无人飞行器的目标方向的方法和装置。可以提供一种用于确定无人飞行器的目标方向的方法。该方法可以包括在计算机实现的显示器上提供图像,其中,所述图像是无人飞行器支撑的成像设备捕获的;当用户在所述图像上选择点时,获得选定点在所述图像上的位置;以及基于所述选定点在所述图像上的所述位置来确定所述目标方向。其中,所述无人飞行器被配置成以基本上直线的方式在所述目标方向上移动,并在所述目标方向上无限期地行进直到其遇到停止或改变准则。到其遇到停止或改变准则。到其遇到停止或改变准则。
技术研发人员:胡骁 刘昂 张立天 唐克坦
受保护的技术使用者:深圳市大疆创新科技有限公司
技术研发日:2016.02.29
技术公布日:2022/7/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。