1.本发明涉及水文地质监测技术领域,特别涉及一种海湾纳潮量预报与监测装置及其工作方法。
背景技术:
2.海湾的纳潮量是指一个海湾可以接纳的潮水的体积,这是表征半封闭海湾生命力的重要指标,其大小的变化直接影响到海湾的潮流特性,从而影响海湾冲淤能力、海湾与外海的水交换强度以及污染物的迁移扩散,从而制约着海湾的自净能力和环境容量,对于维护海湾良好的生态环境至关重要,还有可能破坏水动力条件与海湾形态之间的动态平衡。
3.海湾纳潮量的定义为海湾高潮水量与低潮水量之差,纳潮量的数值主要取决于海湾高、低潮时潮位的变化和海域面积的变化。纳潮量的计算,通常采用以下公式式中,w为纳潮量;s1、s2分别为平均高、低潮潮位的水域面积;h1、h2分别为s1、s2所对应的潮高。李希彬等在《东海大堤对湛江湾水动力环境影响的研究》中提出一种通过断面的通量来计算纳潮量的方法,其计算公式为:;其中;,其中n为断面上的监测点数,u、v分别为某一监测点某一时间的垂直断面向和平行断面向海水流速,h为对应时间和监测点处水深,lu、lv分别为监测点的垂直断面向和平行断面向宽度,qu和qv分别是单位时间内通过断面的垂直断面向和平行断面向水通量,t1和t2分别是涨潮或落潮开始和结束时的时间,得到q即为即为一个涨潮或落潮周期内通过断面的水通量。
4.在采用断面的通量来计算纳潮量的方法需要建立足够数量的观测点以获取相邻海角间最短断面的水流流速,从而计算断面的水通量。但实际实施过程中,由于海底流场的复杂性,承载监测设备的浮体处于不规则摆动状态,这导致难以精确获取垂直断面向和平行断面向的精确流速,使得计算的纳潮量与实际值偏差较大。为此,我们提出一种海湾纳潮量预报与监测装置及其工作方法。
技术实现要素:
5.本发明的主要目的在于提供一种海湾纳潮量预报与监测装置及其工作方法,可以有效解决背景技术中的问题。
6.为实现上述目的,本发明采取的技术方案为:一种海湾纳潮量预报与监测装置及其工作方法,所述的监测与预报装置包括基站a、基站b和监测点,基站a与基站b分布在海湾入口的两侧海角连线的最短路径处,所述监测点与基站a和基站b均无线通信连接,且监测点均匀分布在基站a与基站b的连线路径上。
7.所述监测点包括浮体、供电模块、通信模块、连接模块、监测模块、锚链和锚头,用于获取基站a与基站b的连线断面上垂直和平行向的流速值,所述供电模块和通信模块均安装于浮体内部,所述连接模块安装于浮体下端,所述连接模块通过万向传动轴与监测模块
连接,所述监测模块与锚链转动连接,且监测模块在锚链和锚头的重力作用下完全浸入水中。
8.所述连接模块包括防水罩、微控制器、倾角传感器、驱动器和转角传感器,所述驱动器安装于防水罩的中部,且驱动器的动力输出端与万向传动轴的输入端连接,所述微控制器、倾角传感器和转角传感器均安装于防水罩的内部。
9.所述监测模块包括外筒体、调节器、垂直向测速传感器和水平向测速传感器,所述外筒体上端与万向传动轴的输出端连接,下端通过万向节与锚链连接,所述垂直向测速传感器和水平向测速传感器均通过调节器与外筒体连接。
10.进一步的,所述供电模块为太阳能发电板及其附件。
11.进一步的,所述通信模块通过无线电波与基站a和基站b实现通信。
12.进一步的,所述外筒体呈圆柱状设置,且外筒体外端面均匀开设有不少于五组呈垂直分布的贯穿通孔,所述调节器安装于外筒体的通孔内部,且与外筒体转动连接。
13.进一步的,所述垂直向测速传感器和水平向测速传感器均具有流线型倒圆锥体状的壳体,且测速传感器安装于壳体的中轴线处。
14.进一步的,所述监测点监测断面区域的垂直断面向宽度介于0.5-10m,平行断面向宽度介于10-2000m。
15.进一步的,该装置的使用步骤如下:步骤一,选取海湾入口的两侧海角连线的最短路径所在竖直平面为水通量计算断面,水通量计算断面上均匀设置多组监测点,并通过监测点获取垂线上不同深度在某一时间的垂直断面向和平行断面向的海水流速值;步骤二,通过通信模块将获取的海水流速值发送至基站a或者基站b处,基站将获取的海水流速值带入计算公式:;计算得出一个涨潮或落潮周期内通过断面的水通量。
16.与现有技术相比,本发明具有如下有益效果:(1)通过设有的监测模块,可以实时获取选取断面处垂直断面向和平行断面向海水流速数据值,并通过通信模块以无线电波通信方式将数据信息发送至任意基站处,提高了数据传输的时效性,实现海湾纳潮量的实时监测;(2)通过设有的连接模块,可以获取监测模块的倾角值,并通过驱动器带动监测模块进行角度纠正,使垂直向测速传感器和水平向测速传感器测得的水流数据均为与选取端面垂直和平行的水流流速,可以提高数据的准确度,从而减小计算的误差值,提高纳潮量计算的精确度;(3)通过设有的通信模块,并采用基于时间差的无线电波定位方法实现对监测点浮体的实时定位,从而可以摒弃浮体漂离至选定的监测断面区域的垂直断面向宽度或平行断面向宽度所围成矩形范围之外时所获取的无效的水流流速数值,减少了后期的数据处理量,提高了纳潮量监测系统的时效性。
附图说明
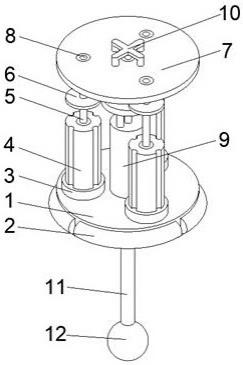
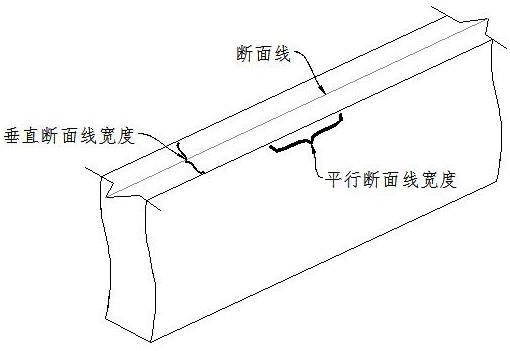
17.图1为本发明监测点的分布结构示意图;图2为本发明监测模块安装的结构示意图;图3为本发明外筒体的结构示意图;图4为本发明断面线分布示意图。
18.图中:1、基站a;2、基站b;3、监测点;31、浮体;32、供电模块;33、通信模块;34、连接模块;35、监测模块;351、外筒体;36、锚链;37、锚头。
具体实施方式
19.下面结合具体实施方式对本发明作进一步的说明,其中,附图仅用于示例性说明,表示的仅是示意图,而非实物图,不能理解为对本发明的限制,为了更好地说明本发明的具体实施方式,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸。
20.实施例1如图1-4所示,一种海湾纳潮量预报与监测装置及其工作方法,监测与预报装置包括基站a1、基站b2和监测点3,基站a1与基站b2分布在海湾入口的两侧海角连线的最短路径处,监测点3与基站a1和基站b2均无线通信连接,且监测点3均匀分布在基站a1与基站b2的连线路径上。
21.监测点3包括浮体31、供电模块32、通信模块33、连接模块34、监测模块35、锚链36和锚头37,用于获取基站a1与基站b2的连线断面上垂直和平行向的流速值,供电模块32和通信模块33均安装于浮体31内部,连接模块34安装于浮体31下端,连接模块34通过万向传动轴与监测模块35连接,监测模块35与锚链36转动连接,且监测模块35在锚链36和锚头37的重力作用下完全浸入水中。
22.连接模块34包括防水罩341、微控制器342、倾角传感器343、驱动器344和转角传感器345,驱动器344安装于防水罩341的中部,且驱动器344的动力输出端与万向传动轴的输入端连接,微控制器342、倾角传感器343和转角传感器345均安装于防水罩341的内部。
23.监测模块35包括外筒体351、调节器352、垂直向测速传感器353和水平向测速传感器354,外筒体351上端与万向传动轴的输出端连接,下端通过万向节与锚链36连接,垂直向测速传感器353和水平向测速传感器354均通过调节器352与外筒体351连接。
24.通信模块33通过无线电波与基站a1和基站b2实现通信。
25.通过采用上述技术方案:使用时,沿水通量计算断面路径均匀布置监测点3,将浮体31放置于水面上,根据放置位置的水深调节锚链36的长度,使锚头37触底后,锚链36呈竖直状态且使监测模块35完全浸入水中,并测量监测模块35的各组垂直向测速传感器353和水平向测速传感器354所处位置的初始水深,垂直向测速传感器353和水平向测速传感器354可以测量该监测点3的垂直断面向和平行断面向海水流速数据值,并通过通信模块33以无线电波通信方式将数据信息发送至任意基站处,基站在接收到流速数据值后,将测量所得的数据值代入计算公式:;其中;,其中n为断面上的监测点数,u、v分别为某一监测点某一时间的垂直断面向和平行断面向海水流速,h为对
应时间和监测点处水深,lu、lv分别为监测点的垂直断面向和平行断面向宽度,qu和qv分别是单位时间内通过断面的垂直断面向和平行断面向水通量,t1和t2分别是涨潮或落潮开始和结束时的时间,得到q即为即为一个涨潮或落潮周期内通过断面的水通量,从而可以实现海湾纳潮量的实时监测。
26.实施例2如图1-4所示,一种海湾纳潮量预报与监测装置及其工作方法,监测与预报装置包括基站a1、基站b2和监测点3,基站a1与基站b2分布在海湾入口的两侧海角连线的最短路径处,监测点3与基站a1和基站b2均无线通信连接,且监测点3均匀分布在基站a1与基站b2的连线路径上。
27.监测点3包括浮体31、供电模块32、通信模块33、连接模块34、监测模块35、锚链36和锚头37,用于获取基站a1与基站b2的连线断面上垂直和平行向的流速值,供电模块32和通信模块33均安装于浮体31内部,连接模块34安装于浮体31下端,连接模块34通过万向传动轴与监测模块35连接,监测模块35与锚链36转动连接,且监测模块35在锚链36和锚头37的重力作用下完全浸入水中。
28.连接模块34包括防水罩341、微控制器342、倾角传感器343、驱动器344和转角传感器345,驱动器344安装于防水罩341的中部,且驱动器344的动力输出端与万向传动轴的输入端连接,微控制器342、倾角传感器343和转角传感器345均安装于防水罩341的内部。
29.监测模块35包括外筒体351、调节器352、垂直向测速传感器353和水平向测速传感器354,外筒体351上端与万向传动轴的输出端连接,下端通过万向节与锚链36连接,垂直向测速传感器353和水平向测速传感器354均通过调节器352与外筒体351连接。
30.外筒体351呈圆柱状设置,且外筒体351外端面均匀开设有不少于五组呈垂直分布的贯穿通孔,调节器352呈圆环状安装于外筒体351的通孔内部,且与外筒体351转动连接。
31.垂直向测速传感器353和水平向测速传感器354均具有流线型倒圆锥体状的壳体,且测速传感器安装于壳体的中轴线处。
32.通过采用上述技术方案:由于水底流场的复杂性,监测模块35往往受到多个方向的水流冲击,同时在水流的推动下浮体31漂离初始位置,在单个监测点3安装的初始,调节监测模块35的垂直向测速传感器353与选取的端面呈垂直状态分布,并设置外筒体351在竖直状态时的倾角传感器343和转角传感器345为标准状态值。当浮体31漂离初始位置后,浮体31带动监测模块35发生偏转,由倾角传感器343检测监测模块35的倾斜角度值,并通过使驱动器352通电运行,驱动器352通过万向传动轴带动外筒体351转动一定角度值,使垂直向测速传感器353的传感器开口端中轴线与选取的端面呈垂直状态,且通过设置的调节器352,调节器352与外筒体351之间转动连接,由于垂直向测速传感器353和水平向测速传感器354均具有流线型倒圆锥体状的壳体,且测速传感器安装于壳体的中轴线处,水流作用于倒圆锥状的壳体,使壳体发生转动,壳体带动调节器352转动,使垂直向测速传感器353保持与选取端面垂直的状态,当平行方向的水流作用于水平向测速传感器354的壳体时,使壳体带动调节器352在外筒体351内部转动至与选取端面平行的状态,从而使垂直向测速传感器353和水平向测速传感器354测得的水流数据均为与选取端面垂直和平行的水流流速,可以提高数据的准确度,从而减小计算的误差值,提高纳潮量计算的精确度。
33.实施例3
如图1-4所示,一种海湾纳潮量预报与监测装置及其工作方法,监测与预报装置包括基站a1、基站b2和监测点3,基站a1与基站b2分布在海湾入口的两侧海角连线的最短路径处,监测点3与基站a1和基站b2均无线通信连接,且监测点3均匀分布在基站a1与基站b2的连线路径上。
34.监测点3包括浮体31、供电模块32、通信模块33、连接模块34、监测模块35、锚链36和锚头37,用于获取基站a1与基站b2的连线断面上垂直和平行向的流速值,供电模块32和通信模块33均安装于浮体31内部,连接模块34安装于浮体31下端,连接模块34通过万向传动轴与监测模块35连接,监测模块35与锚链36转动连接,且监测模块35在锚链36和锚头37的重力作用下完全浸入水中。
35.连接模块34包括防水罩341、微控制器342、倾角传感器343、驱动器344和转角传感器345,驱动器344安装于防水罩341的中部,且驱动器344的动力输出端与万向传动轴的输入端连接,微控制器342、倾角传感器343和转角传感器345均安装于防水罩341的内部。
36.监测模块35包括外筒体351、调节器352、垂直向测速传感器353和水平向测速传感器354,外筒体351上端与万向传动轴的输出端连接,下端通过万向节与锚链36连接,垂直向测速传感器353和水平向测速传感器354均通过调节器352与外筒体351连接。
37.供电模块32为太阳能发电板及其附件。
38.通信模块33通过无线电波与基站a1和基站b2实现通信。
39.监测点3监测断面区域的垂直断面向宽度介于0.5-10m,平行断面向宽度介于10-2000m。
40.通过采用上述技术方案:使用过程中,通过无线电波定位技术,采用基于时间差的定位方法可以实现对监测点3浮体31的实时定位,具体的方法为:在某一时刻t,由监测点3的通信模块33同时向基站a1和基站b2发送一个定位信号,基站a1和基站b2在接收到定位信号后,立即向发送定位信号的监测点3发送反馈信号,并分别记录通信模块33接收到基站a1和基站b的反馈信号的时刻t3和t4,假设基站a1和基站b2在接收到测距信号后到发送反馈信号时的准备时间为t5,则基站a1与该监测点3之间的距离l1可计算得出,计算公式为:;其中c为电磁波的传播速度,同理,基站b2与该监测点3之间的距离l1可计算得出,计算公式为:;由于基站a1和基站b2之间的距离l为固定值,且可通过测量得出,故在基站a1、基站b2和待定位的监测点3之间组成的三角形中,三边长均已知,则可计算出监测点3的方位角,从而实现对监测点3的精确定位。当监测点3漂离至选定的监测断面区域的垂直断面向宽度或平行断面向宽度所围成矩形范围之外时,则说明该监测点测量的水流流速为所计算端面之外的流速值,此时该流速值不适用于实施例1中的计算公式,为无效数据。
41.实施例4如图1-4所示,一种海湾纳潮量预报与监测装置及其工作方法,监测与预报装置包括基站a1、基站b2和监测点3,基站a1与基站b2分布在海湾入口的两侧海角连线的最短路径处,监测点3与基站a1和基站b2均无线通信连接,且监测点3均匀分布在基站a1与基站b2的
连线路径上。
42.监测点3包括浮体31、供电模块32、通信模块33、连接模块34、监测模块35、锚链36和锚头37,用于获取基站a1与基站b2的连线断面上垂直和平行向的流速值,供电模块32和通信模块33均安装于浮体31内部,连接模块34安装于浮体31下端,连接模块34通过万向传动轴与监测模块35连接,监测模块35与锚链36转动连接,且监测模块35在锚链36和锚头37的重力作用下完全浸入水中。
43.连接模块34包括防水罩341、微控制器342、倾角传感器343、驱动器344和转角传感器345,驱动器344安装于防水罩341的中部,且驱动器344的动力输出端与万向传动轴的输入端连接,微控制器342、倾角传感器343和转角传感器345均安装于防水罩341的内部。
44.监测模块35包括外筒体351、调节器352、垂直向测速传感器353和水平向测速传感器354,外筒体351上端与万向传动轴的输出端连接,下端通过万向节与锚链36连接,垂直向测速传感器353和水平向测速传感器354均通过调节器352与外筒体351连接。
45.供电模块32为太阳能发电板及其附件。
46.通信模块33通过无线电波与基站a1和基站b2实现通信。
47.外筒体351呈圆柱状设置,且外筒体351外端面均匀开设有不少于五组呈垂直分布的贯穿通孔,调节器352呈圆环状安装于外筒体351的通孔内部,且与外筒体351转动连接。
48.垂直向测速传感器353和水平向测速传感器354均具有流线型倒圆锥体状的壳体,且测速传感器安装于壳体的中轴线处。
49.监测点3监测断面区域的垂直断面向宽度介于0.5-10m,平行断面向宽度介于10-2000m。
50.通过采用上述技术方案:在装置使用过程中,监测点3放置于海湾入水口断面处,由于湾口上航运业务影响,当船只经过监测点3附近水域时,船只溅起的水浪会改变浅层海流的流速,导致测量结果出现较大误差,同时可能导致浮体31的位置偏离。当船只航行导致浮体31位置偏离时,通过实施例3的方法对浮体31偏离的情况下采集的无效数据摈弃即可,而为了消除船只航行对于浅层海流流速的影响,可通过基站获取被影响的监测点3周围的监测点3获取的流速数据,并通过获取航行当日海湾处风速、天气状态等信息值进行综合判断,当相邻两组监测点3获取的流速数据存在较大差异,且排出风力或降雨等影响因素,则可视为无效数据,不适用于实施例1中的计算公式。
51.通过采用上述技术方案:该装置的使用方法为:选取海湾入口的两侧海角连线的最短路径所在竖直平面为水通量计算断面,水通量计算断面上均匀设置多组监测点3,并通过监测点3获取垂线上不同深度在某一时间的垂直断面向和平行断面向的海水流速值,通过通信模块33将获取的海水流速值发送至基站a1或者基站b2处,基站将获取的海水流速值带入计算公式:;计算得出一个涨潮或落潮周期内通过断面的水通量。
52.以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。