具有成对的一维和二维天线阵列的雷达系统
相关申请的交叉引用
1.本技术根据35u.s.c.119(e)要求于2021年1月27日提交的美国临时申请第63/142,434号的权益,该申请的公开内容通过引用以其整体并入本文。
背景技术:
2.雷达系统使用天线发射和接收电磁(em)信号,以用于检测和跟踪对象。在汽车应用中,雷达天线可包括元件的二维(2d)阵列,以测量与对象相关联的方位角和仰角。方位角和仰角的分辨率大体与阵列的孔径尺寸成比例。使用2d阵列实现大孔径可能需要许多天线元件,这增加了成本。以最小的天线元件和成本维持雷达系统的角分辨率以用于方位角估计和仰角估计这两者是期望的。
技术实现要素:
3.本文档描述了具有成对的一维(1d)和2d天线阵列的雷达系统的技术和系统。即使与传统的雷达系统相比具有少得多的天线元件,成对的阵列也使得示例雷达系统能以较低的成本和较低的复杂性水平具有相当的角分辨率。例如,雷达系统包括处理器和天线,所述天线可接收由一个或多个对象反射的电磁能量。天线包括1d(例如,线性)阵列和2d阵列。1d阵列包括被定位在第一方向(例如,方位角方向)上并且在第一方向上间隔开第一距离和第二距离的天线元件。2d阵列包括被定位在第一方向和与第一方向正交的第二方向(例如,仰角方向)上的至少四个其他天线元件。其他天线元件在第二方向上间隔开第三距离并且在第一方向上间隔开第一方向与第二方向的总和。处理器可以使用由1d阵列接收的电磁能量来确定在第一方向上的与一个或多个对象相关联的第一角度和第二角度。处理器还可以使用由2d阵列接收的em能量来确定与一个或多个对象相关联的第三角度和第四角度。第三角度在第一方向上,并且第四角度在第二方向上。处理器随后可以使用第二角度和第三角度,将第一角度和第四角度与一个或多个对象中的相应对象进行关联。
4.本文档还描述了由以上总结的系统和在本文中阐述的雷达系统的其他配置来执行的方法、以及用于执行这些方法的装置。
5.本发明内容介绍了与具有成对1d和2d天线阵列的雷达系统相关的简化概念,在具体实施方式和附图中进一步描述了该简化概念。本发明内容并非旨在标识出要求保护的主题的必要特征,也并非旨在用于确定要求保护的主题的范围。
附图说明
6.在本文档中,参考以下附图描述了具有成对的1d和2d天线阵列的雷达系统的一个或多个方面的细节。贯穿附图通常使用相同的数字来引用相似的特征和部件:图1示出了可以实现具有成对的1d和2d天线阵列的雷达系统的示例环境;图2a和图2b示出了具有成对的1d和2d天线阵列的示例天线;图3示出了具有成对的1d和2d天线阵列的雷达系统的示例概念图;
图4示出了使用成对的1d和2d天线阵列将方位角和仰角关联到相应对象的角度测定(angle-finding)模块的示例概念图;图5示出了具有成对的1d和2d天线阵列的雷达系统的另一示例概念图;图6示出了使用成对的1d和2d天线阵列将方位角和仰角关联到相应对象的角度测定模块的另一示例概念图;以及图7示出了具有成对的1d和2d天线阵列以及角度测定模块的雷达系统的示例方法。
具体实施方式
概述
7.雷达系统可以被配置为一种重要的感测技术,基于交通工具的系统可以使用该感测技术来获取有关周围环境的信息。例如,基于交通工具的系统可以使用雷达系统来检测道路中或道路附近的对象,并在必要时采取必要的行动(例如,降低速度、改变车道)以避免碰撞。雷达系统通常包括至少两个天线来发射和接收em辐射。一些雷达系统包括具有天线元件的一维(1d)线性阵列的接收天线,以测量与对象关联的方位角或仰角。这种雷达系统可以估计与对象相关联的单个角度(例如,仰角或方位角)。方位角方向或仰角方向上的大孔径还可增加天线元件的数量以及成本以提供足够的角分辨率。
8.一些其他雷达系统包括具有天线元件的二维(2d)平面阵列的接收天线,以估计对象的方位角和仰角这两者。在这种雷达系统中,可以使用数字波束成形来估计对象的角位置。在数字波束成形中,雷达系统通过使用2d快速傅里叶变换(fft)来分析跨天线元件的相对相位,从而表征对象的角度信息。这种雷达系统的角分辨率通常取决于2d平面阵列的孔径尺寸。较大的孔径尺寸可改进角分辨率,但是需要附加的天线元件以及增加的成本。
9.又其他雷达系统包括具有天线元件的稀疏2d阵列的接收天线。这种雷达系统可使用方位角线性阵列和仰角线性阵列来分别估计对象的方位角和仰角。这些雷达系统使用匹配算法来针对每一个对象关联方位角和仰角。尽管这种系统通常包括比平面2d阵列更少的天线元件,但增加的孔径尺寸往往会在辐射图(radiation pattern)中引入栅瓣,尤其是在阵列间距大于em信号的波长的二分之一时。对于包括汽车应用在内的许多应用而言,这些系统的角度测定也可能过于复杂。
10.相比之下,本文档描述了提供具有成对1d和2d阵列的接收天线以支持角度测定特征的技术和系统。例如,雷达系统可以包括具有第一稀疏1d阵列和稀疏2d阵列的天线阵列。1d阵列被定位在第一方向(例如,仰角方向或方位角方向)上并且包括间隔开第一距离和第二距离的多个天线元件。2d阵列包括多个天线元件,所述多个天线元件在第一方向上间隔开第一距离与第二距离的总和,并且在第二方向(例如,方位角方向或仰角方向)上间隔开第三距离和/或第四距离。第二方向与第一方向正交。以这种方式,所描述的系统和技术可减少天线元件的数量,同时保持可以使用具有类似孔径尺寸的矩形2d阵列以其他方式实现的角分辨率。
11.雷达系统使用成对的1d和2d阵列接收的em能量估计与一个或多个附近对象相关联的仰角和方位角。雷达系统随后可以将仰角和方位角与一个或多个对象中的相应对象进行关联。以这种方式,所描述的雷达系统将方位角和仰角关联到相应对象的计算复杂度与
具有常规2d平面阵列的常规雷达系统的计算复杂度相似。所描述的角度测定技术可以应用于所描述的成对的1d和2d阵列的各种配置。
12.此示例只是所描述的具有成对1d和2d天线阵列的雷达系统的技术和系统的一个示例。本文档描述了其他的示例和实现。操作环境
13.图1示出了可以实现具有成对的1d和2d天线阵列的雷达系统102的示例环境100。在所描绘的环境100中,雷达系统102被安装到交通工具104或被集成在交通工具104内。雷达系统102可以检测交通工具104的附近区域中的一个或多个对象120。尽管示出为汽车,但是交通工具104可以表示其他类型的机动交通工具(例如,汽车、摩托车、公共汽车、拖拉机、半挂车)、非机动交通工具(例如,自行车)、有轨交通工具(例如,火车)、水运工具(例如,船只)、飞行器(例如,飞机)、或航天器(例如,卫星)。通常,制造商可以将雷达系统102安装到任何移动平台,包括移动机械或机器人设备。
14.在所描绘的实现中,雷达系统102被安装在交通工具104的前部上并照射对象120。雷达系统102可从交通工具104的任何外表面检测对象120。例如,雷达系统102可被集成到保险杠、侧视镜、前灯、尾灯、或对象120需要检测的任何其他内部位置或外部位置中。在一些情况下,交通工具104包括多个雷达系统102,诸如提供更大仪器视场的第一雷达系统102和第二雷达系统102。通常,雷达系统102可以被设计成具有分布在交通工具104的不同位置处的雷达系统102的各部分,以提供包含感兴趣区域的特定视场。示例视场包括360度视场、一个或多个180度视场、一个或多个90度视场等,它们可重叠或被组合成特定尺寸的视场。
15.对象120由反射雷达信号的一种或多种材料构成。取决于应用,对象120可表示感兴趣目标。在一些情况下,对象120可以是移动对象(例如另一交通工具)或静止对象(例如路边标志)。
16.雷达系统102通过经由天线元件发射em信号或波形,来发射em辐射。在环境100中,雷达系统102可以通过发射和接收一个或多个雷达信号来检测和跟踪对象120。例如,雷达系统102可以发射在100和400千兆赫(ghz)之间、在4和100ghz之间、或在大约70和80ghz之间的em信号。
17.雷达系统102可以包括发射器106和至少一个天线110,以用于发射em信号。雷达系统102还可以包括接收器108和至少一个天线110,以用于接收em信号的被反射的版本。发射器106包括用于发射em信号的一个或多个部件。接收器108包括用于检测反射的em信号的一个或多个部件。发射器106和接收器108可以一起并入同一集成电路(例如,收发器集成电路)上或分开地并入不同的集成电路上。在其他实现中,雷达系统102不包括分开的天线110,但是发射器106和接收器108各自包括天线或天线元件。
18.雷达系统102还包括一个或多个处理器112(例如,能量处理单元)和计算机可读存储介质(crm)114。处理器112可为微处理器或片上系统。处理器112可以执行存储在crm 114中的指令。例如,处理器112可以处理由天线110接收的em能量并且使用角度测定模块116确定对象120相对于雷达系统102的位置。处理器112还可以为至少一个汽车系统生成雷达数据。例如,处理器112可以基于来自天线110的经处理的em能量来控制交通工具104的自主驾驶系统或半自主驾驶系统。
19.角度测定模块116获得由天线110或接收器108接收到的em能量,并确定与对象120
相关联的方位角和仰角。角度测定模块116可被实现为由处理器112所执行的crm 114中的指令、硬件、软件或它们的组合。
20.雷达系统102可基于em信号从雷达系统102行进到对象120以及从对象120回到雷达系统102所花费的时间,来确定到对象120的距离。雷达系统102还可以使用角度测定模块116根据基于由雷达系统102接收的最大振幅回波信号的方向的方位角128及仰角130,来确定对象120的位置。
21.作为示例,图1示出了在道路118上行驶的交通工具104。雷达系统102检测在交通工具104前方的对象120。雷达系统102可限定坐标系,所述坐标系具有x轴122(例如,在沿道路118的前进方向上)、y轴124(例如,垂直于x轴122且沿道路118的表面)和z轴126(例如,垂直于道路118的表面)。雷达系统102可根据方位角128和仰角130来定位对象120。方位角128可表示从x轴122到对象120的水平角。仰角130可表示从道路118的表面(例如,由x轴122和y轴124所限定的平面)到对象120的垂直角。
22.交通工具104还可以包括依赖于来自雷达系统102的数据的至少一个汽车系统,诸如驾驶员辅助系统、自主驾驶系统、或半自主驾驶系统。雷达系统102可包括与依赖于数据的汽车系统相接的接口。例如,处理器112经由该接口输出基于由接收器108或天线110接收的em能量的信号。
23.通常,汽车系统使用由雷达系统102提供的雷达数据来执行功能。例如,驾驶员辅助系统可提供盲点监测并生成警报,该警报指示与由雷达系统102检测到的对象120的潜在碰撞。在此类实现中,来自雷达系统102的雷达数据指示改变车道何时是安全或不安全的。自主驾驶系统可以将交通工具104移动到道路118上的特定位置,同时避免与由雷达系统102检测到的对象120发生碰撞。由雷达系统102提供的雷达数据可以提供与到对象120的距离和对象110的位置有关的信息,以使自主驾驶系统能够执行紧急制动、执行车道改变、或调整交通工具104的速度。
24.图2a和图2b示出了具有成对的1d和2d阵列的示例天线200。天线200(例如,天线200-1和天线200-2)是图1中的雷达系统102的天线110的示例,具有相似的部件。天线200包括多个天线元件208。天线元件208表示1d阵列204和2d阵列206的元件的物理位置或相位中心位置。天线元件208还可以表示由多输入和多输出(mimo)技术形成的天线200的元件的合成位置或相位中心位置。
25.被固定到印刷电路板(pcb)202,天线200包括在第一方向上的1d阵列204(例如方位角阵列)以及在第一方向(例如,方位角方向)和与第一方向正交的第二方向(例如,仰角方向)上的2d阵列206(例如2d阵列206-1和2d阵列206-2)。在其他实现中,天线200可以用不同的材料、部件和技术制造。例如,天线200可以包括透镜天线、金属化塑料天线、碟形(dish)天线、喇叭(horn)天线或它们的组合。
26.在操作中,天线200可接收由一个或多个对象120所反射的em能量。在所描绘的实现中,1d阵列204被定位在方位角方向上。在其他实现中,1d阵列204可以被定位在仰角方向或另一方向上。在所描绘的实现中,1d阵列204被定位在2d阵列206-1和206-2下方。在其他实现中,1d阵列204可以被定位在2d阵列206-1或206-2的上方或侧面。例如,1d阵列204和2d阵列206-1或2d阵列206-2可以被配置或布置成近似t形形状(例如,1d阵列204位于2d阵列206-1上方),近似倒置的t形形状(例如,1d阵列204位于2d阵列206-1下方)或近似十字形形
状(例如,1d阵列204被定位穿过2d阵列206-1的大致中心)。
27.1d阵列204是包括多个天线元件208的稀疏线性阵列。天线元件208交替地间隔开第一距离d
1 210和第二距离d
2 212。对于图2a中的天线200-1的所示实现并从左到右移动,1d阵列204的天线元件208被分开第一距离210、第二距离212、第一距离210、第二距离212等等。1d阵列204的每隔一个天线元件208被分开第三距离d
3 214,第三距离d
3 214表示第一距离210与第二距离212的总和。换言之,1d阵列204可以由两个均匀的线性阵列形成,这两个均匀的线性阵列两者包括间隔开第三距离214的天线元件208并且这两个均匀的线性阵列偏移第一距离210。
28.2d阵列206的天线元件208可以被布置成近似矩形,如图2a和图2b所示。这些天线元件208可以被定位成靠近1d阵列的天线元件208(例如,如图2a和图2b所示)。在其他实现中,2d阵列206的天线元件208可以与1d阵列204的天线元件208重叠(例如,1d阵列可以被定位在2d阵列206的侧向端部处或在2d阵列206的侧向端部之间),或者与1d阵列204的天线元件208分开。2d阵列206的天线元件208可以被布置成二维稀疏阵列,如图2a和图2b所示。可以基于雷达系统102中其他部件的位置和布置来选择1d阵列204和2d阵列206的具体布置。
29.2d阵列206是包括至少四个天线元件208的稀疏2d阵列。天线元件208在方位角方向(或与1d阵列204相同的方向)上间隔开第三距离214。图2a的天线200-1中的2d阵列206-1的天线元件208在仰角方向(或与1d阵列204的方向正交的方向)上间隔开第四距离d
4 214。图2b的天线200-2中的2d阵列206-2的天线元件208在仰角方向(或与1d阵列204的方向正交的方向)上交替地间隔开第四距离216和第五距离d
5 218。对于图2b中的天线200-2的所示实现并从上到下移动,2d阵列206-2的天线元件208在仰角方向上分开第四距离216、第五距离218、第四距离216、第五距离218等等。2d阵列204的每隔一个天线元件208在仰角方向上分开第六距离d6 220,第六距离d6 220表示第四距离216与第五距离218的总和。换言之,2d阵列206-2可以由两个均匀的2d阵列形成,这两个均匀的2d阵列两者包括在仰角方向上间隔开第六距离220的天线元件208并且这两个均匀的2d阵列偏移第四距离216。如关于图3至图6所述,角度测定模块116使用第一距离210、第二距离212、第三距离214、第四距离216、第五距离218和/或第六距离220来针对相应对象120将仰角关联到方位角。
30.1d阵列204和2d阵列206包括多个天线元件208。1d阵列204可以包括m个天线元件208。2d阵列206可以包括未被1d阵列204包含的n个天线元件208(例如,至少四个)。在汽车应用中,2d阵列206中的天线元件208的数量可比要由雷达系统102检测的对象120的所预期的最大数量要大。2d阵列206中的天线元件208的数量n通常小于m与p的乘积,其中p表示2d阵列206的仰角方向上的天线元件208的数量。在一些实现中,n小于m与p的乘积的一半(例如,)。天线200中的天线元件208的总数通常等于m n。天线200中的天线元件208的数量(例如,m n)通常远小于具有相同的孔径尺寸的矩形阵列(例如m
×
p)中的天线元件208的数量。
31.在图2a所描绘的实现中,1d阵列204包括14个天线元件208并且2d阵列206包括不被1d阵列204包含的16个天线元件208。天线200-1包括30个天线元件208,远小于被包括在具有相同孔径尺寸的矩形阵列中的80个天线元件。在其他实现中,1d阵列204和2d阵列206可以包括更少或附加的天线元件208。2d阵列206通常包括不被1d阵列204包含的至少四个
天线元件208。
32.1d阵列204和2d阵列206可以是提供高增益和低损耗的平面阵列。平面阵列由于其小尺寸,非常适合交通工具集成。例如,天线元件208可为在pcb 206的一个表面的电镀材料中蚀刻或以其他方式形成的槽,以用于基板集成波导(siw)天线。作为另一示例,天线元件208可以是用金属化塑料和/或金属构建的波导天线的辐射槽。天线元件208还可以是孔径天线、微带天线或偶极子天线的部分。例如,1d阵列204和2d阵列206可以包括贴片元件的子阵列(例如,微带贴片天线子阵列)或偶极子元件。
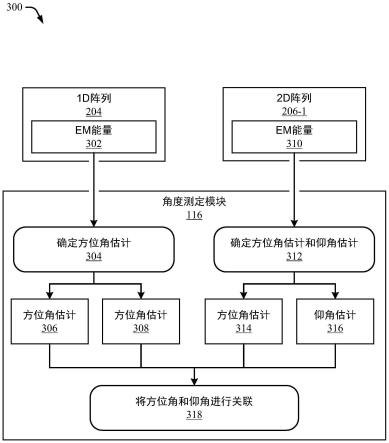
33.图3示出了具有成对的1d阵列和2d阵列以及角度测定模块116的雷达系统的示例概念图300。图3的雷达系统例如可以是图1的雷达系统102。雷达系统102包括成对的1d阵列和2d阵列。在所描绘的实现中,雷达系统102包括天线200-1的1d阵列204和2d阵列206-1,天线200-1可以布置在各种位置,包括图2a中所示的布置。
34.在304处,角度测定模块116获得由1d阵列204接收的em能量302,并且确定与一个或多个对象120相关联的方位角估计306和308。例如,角度测定模块116可以基于第一距离d1210来确定方位角估计306,θ1,θ2,
…
,θn,其中n表示目标的估计数量。角度测定模块116还可以基于第三距离d3214确定方位角估计308,第三距离d3214表示第一距离210与第二距离212的总和。
35.在312处,角度测定模块116获得由2d阵列206-1接收的em能量310,并且确定与一个或多个对象120相关联的方位角估计314和仰角估计316。例如,角度测定模块116可以基于第三距离d1210确定方位角估计314,角度测定模块116还可以基于第四距离216d4确定仰角估计316,φ1,φ2,
…
,φn。
36.角度测定模块116可以使用各种角度测定函数来根据em能量302和em能量310确定方位角估计306、方位角估计308、方位角估计314和仰角估计316。作为非限制性示例,角度测定模块116可以使用伪谱函数(包括空间交替广义期望最大化(sage)、延迟及和(ds)、最小方差无失真响应(mvdr)和/或基于多信号分类(music)的函数),计算由1d阵列204和2d阵列206-1接收的em信号的到达方向。作为另一示例,角度测定模块116可以使用通过旋转不变技术的信号参数估计(estimation of signal parameters via rotational invariance technique,esprit)技术或fft波束形成来计算方位角估计306、方位角估计308、方位角估计314以及仰角估计316。角度测定模块116可以以相对低的处理复杂度和成本来确定方位角估计和仰角估计。
37.在318处,角度测定模块116基于共同的(例如,共享的)方位角估计308和314,针对对象120关联方位角估计306和仰角估计316。具体地,角度测定模块116确定与一个或多个对象120中的每一个相关联的方位角估计306和仰角估计316。参照图4更详细地描述概念图300的示例。
38.图4示出了将方位角估计306和仰角估计316关联到相应对象120的角度测定模块的示例概念图400。例如,图4的角度测定模块可以是图1至图3的角度测定模块116。如参照图3所描述的,角度测定模块116确定与对象120相关联的方位角估计306和仰角估计316。
39.在402处,角度测定模块116可以基于分别由1d阵列204和2d阵列206-1接收的em能量302和em能量310,来形成或生成复协方差矩阵。例如,角度测定模块116可以使用等式(1)形成复协方差矩阵r:
确定仰角估计516,β1,β2,
…
,βn。
47.角度测定模块116可以使用各种角度测定函数来根据em能量502和em能量510确定方位角估计506、方位角估计510、仰角估计514和仰角估计516。如上所述,角度测定模块116可以使用伪谱函数,包括sage、ds、mvdr和/或基于的music的函数,来计算由1d阵列204和2d阵列206-2接收的em信号的到达方向。作为另一示例,角度测定模块116可以使用esprit技术或fft波束成形来计算方位角估计506、方位角估计508、仰角估计514和仰角估计516。角度测定模块116可以以相对低的处理复杂度和成本来确定方位角估计和仰角估计。
48.在518处,角度测定模块116基于共同的方位角估计508和仰角估计514,将方位角估计506和仰角估计516关联到对象120。具体地,角度测定模块116确定与一个或多个对象120中的每一个相关联的方位角估计506和仰角估计516。参照图6更详细地描述概念图500的示例。
49.图6示出了将方位角估计506和仰角估计516关联到相应对象120的角度测定模块的另一示例概念图600。例如,图6的角度测定模块可以是图1至图3的角度测定模块116。如参照图5所描述的,角度测定模块116确定与对象120相关联的方位角估计506和仰角估计516。
50.在602处,角度测定模块116可以基于分别由1d阵列204和2d阵列206-2接收的em能量502和em能量510,来形成或生成复协方差矩阵。例如,角度测定模块116可以使用等式(2)形成复协方差矩阵r:r=xxhꢀꢀꢀꢀ
(2)其中x表示来自em能量502和em能量510的测量值,并且h表示x的埃尔米特矩阵(例如,自伴随矩阵)。埃尔米特矩阵是复方阵,等于它自己的共轭转置(例如,第i行第j列中的元素等于第j行第i列中的元素的复共轭)。
51.在604处,角度测定模块116可以使用特征值分解从复协方差矩阵r估计目标的数量n(例如,检测到的对象120)和信号子空间es。
52.在606处,角度测定模块116可以选择信号子空间中的与1d阵列204相对应的元素,并且确定方位角估计506,θ1,θ2,
…
,θn和方位角估计508,其中n表示对象120的估计数量。角度测定模块116可以例如应用二维单一的esprit来估计方位角。方位角估计506是基于第一距离210的,并且方位角估计508是基于第三距离214的。在其他实现中,角度测定模块116可以使用其他伪谱函数,包括sage、ds、mvdr和/或基于music的函数,来计算由1d阵列204接收的em信号的到达方向。角度测定模块116可以以相对低的处理复杂度和成本来确定方位角估计506和508。
53.在608处,角度测定模块116可以选择信号子空间中的与2d阵列206-2相对应的元素,并且确定仰角估计514,φ1,φ2,
…
,φn和仰角估计516,β1,β2,
…
,βn,其中n表示对象120的估计数量。角度测定模块116可以例如应用二维单一的esprit来估计仰角。仰角估计514是基于2d阵列206-2中的第六距离220的,并且仰角估计516是基于2d阵列206-2中的第四距离216的。在其他实现中,角度测定模块116可以使用其他伪谱函数,包括sage、ds、mvdr和/或基于music的函数,来计算由2d阵列206-2接收的em信号的到达方向。角度测定模块116可以以相对低的处理复杂度和成本来确定可能的仰角估计514和仰角估计516。
54.在610处,角度测定模块116可以从方位角估计506和508展开方位角。角度测定模
块116还可以根据仰角估计514和516展开仰角。角度测定模块116随后可以将展开的方位角估计506与仰角估计516配对。可以使用方位角估计508和仰角估计514中的共同或共享的角度对来将仰角估计516与方位角估计506配对。示例方法
55.图7示出了具有成对的1d和2d天线阵列以及角度测定模块116的雷达系统102的示例方法700。方法700被示出为被执行的多组操作(或动作),但不必限于在本文中示出操作的次序或组合。此外,操作中的一个或多个操作中的任一者可以被重复、被组合或被重组以提供其他方法。在以下讨论的各部分中,可以参考图1的环境100以及图1至图6中详述的实体,仅出于示例对它们作出参考。该技术不限于由一个实体或多个实体执行。
56.在702处,雷达系统的天线在1d阵列处接收由一个或多个对象反射的em能量。1d阵列包括被定位在第一方向上并且在第一方向上间隔开第一距离和第二距离的第一天线元件。例如,雷达系统102的天线200-1或天线200-2可以在1d阵列204处接收由一个或多个对象120反射的em能量302或502。1d阵列204可以包括定位在方位角方向上的多个天线元件208。在其他实现中,1d阵列204的天线元件208可以定位在仰角方向或其他方向上。1d阵列204的天线元件208交替地间隔开第一距离d1210和第二距离d2212。
57.在704处,雷达系统的天线在2d阵列处接收由一个或多个对象反射的em能量。2d阵列包括不被1d阵列包含的至少四个第二天线元件。第二天线元件被定位在第一方向上以及与第一方向正交的第二方向上。第二天线元件在第一方向上间隔开第一距离与第二距离的总和。第二天线元件中的至少一些在第二方向上间隔开第三距离。例如,雷达系统102的天线200-1或天线200-2可分别在2d阵列206-1或2d阵列206-2处接收由一个或多个对象120反射的em能量310或510。2d阵列206可以包括定位在方位角方向上和仰角方向上的多个天线元件208。具体地,2d阵列206包括不被1d阵列204包含的至少四个天线元件208。在其他实现中,2d阵列206的天线元件208可以定位在彼此正交的其他方向上。2d阵列206的天线元件208在方位角方向上间隔开第三距离d3214。第三距离214表示第一距离210与第二距离212的总和。2d阵列206-1的天线元件208在仰角方向上间隔开第四距离d4216。2d阵列206-2的天线元件208在仰角方向上交替地间隔开第四距离d4216和第五距离d5218。
58.在706处,基于在1d阵列处接收到的em能量来确定与一个或多个对象相关联的第一角度和第二角度。第一角度和第二角度在第一方向上。例如,雷达系统102的处理器112可以使用角度测定模块116以及由1d阵列204接收的em能量302,来确定与一个或多个对象120相关联的方位角估计306和308。
59.在708处,使用由2d阵列接收的em能量来确定与一个或多个对象相关联的第三角度和第四角度。第三角度在第一方向上,并且第四角度在第二方向上。例如,处理器112可以使用角度测定模块116和由2d阵列206-1接收的em能量310来确定与一个或多个对象120相关联的方位角估计314和仰角估计316。
60.在710处,使用第二角度和第三角度将第一角度和第四角度与一个或多个对象中的相应对象进行关联。例如,处理器112可以使用角度测定模块116以及方位角估计308和方位角估计314,来将方位角估计306和仰角估计316与一个或多个对象120中的相应对象进行关联。示例
61.在以下部分中,提供了示例。
62.示例1:一种雷达系统,包括:天线,所述天线被配置为接收由一个或多个对象反射的电磁(em)能量,所述天线包括:一维(1d)阵列,所述一维(1d)阵列包括被定位在第一方向上的第一天线元件,第一天线元件在第一方向上间隔开第一距离和第二距离;二维(2d)阵列,所述二维(2d)阵列包括不被1d阵列包含并且被定位在第一方向和第二方向上的至少四个第二天线元件,第二方向与第一方向正交,第二天线元件中的至少一些在第二方向上间隔开第三距离并且在第一方向上间隔开第一距离与第二距离的总和;以及一个或多个处理器,所述一个或多个处理器被配置成用于:使用在1d阵列处接收的em能量确定与一个或多个对象相关联的第一角度和第二角度,第一角度和第二角度在第一方向上;使用在2d阵列处接收的em能量确定与一个或多个对象相关联的第三角度和第四角度,第三角度在第一方向上,并且第四角度在第二方向上;并且使用第二角度和第三角度,将第一角度和第四角度与一个或多个对象中的相应对象进行关联。
63.示例2:示例1的雷达系统,其中:第一角度是基于第一距离确定的;第二角度是基于第一距离与第二距离的总和确定的;并且第三角度是基于第三距离确定的。
64.示例3:示例1或2的雷达系统,其中第二天线元件在第二方向上间隔开第三距离和第四距离。
65.示例4:示例3的系统,其中,一个或多个处理器被进一步配置成用于:使用由2d阵列接收的em能量确定与一个或多个对象相关联的第五角度,第五角度在第二方向上,其中一个或多个处理器被配置成用于:通过使用第二角度、第四角度和第五角度至少将第一角度和第三角度与一个或多个对象中的相应对象进行关联,来将第一角度和第三角度与一个或多个对象中的相应对象进行关联。
66.示例5:示例4的雷达系统,其中:第一角度是基于第一距离确定的;第二角度和第四角度是基于第一距离与第二距离的总和确定的;第三角度是基于第三距离确定的;第五角度是基于第三距离与第四距离的总和确定的。
67.示例6:任何在先示例的雷达系统,其中所述一个或多个处理器被配置成用于以以下方式将第一角度和第四角度与一个或多个对象中的相应对象进行关联:使用在1d阵列和2d阵列处接收到的em能量生成复协方差矩阵;使用复协方差矩阵的特征值分解来确定对一个或多个对象的数量的估计;展开第一角度和第四角度;并且使用第二角度和第三角度的共同值来将展开的第四角度与展开的第一角度配对。
68.示例7:示例4的雷达系统,其中所述一个或多个处理器被配置成用于以以下方式将第一角度和第四角度与一个或多个对象中的相应对象进行关联:使用在1d阵列和2d阵列处接收到的em能量生成复协方差矩阵;使用复协方差矩阵的特征值分解来确定对一个或多个对象的数量的估计;展开第一角度、第二角度、第三角度、第四角度和第五角度;并且使用第二角度和第五角度的共同值来将展开的第四角度与展开的第一角度配对。
69.示例8:任何在前示例的雷达系统,其中1d阵列被定位在方位角方向上并且2d阵列被定位在方位角方向和仰角方向上。
70.示例9:任何在前示例的雷达系统,其中1d阵列是线性阵列。
71.示例10:任何在前示例的雷达系统,其中1d阵列和2d阵列被配置成近似t形形状、近似倒置的t形形状、或近似十字形形状。
72.示例11:任何在前示例的雷达系统,其中1d阵列包括第一数量的天线元件,并且2d阵列包括在第一方向上的第二数量的天线元件,天线元件的第一数量大于天线元件的第二数量。
73.示例12:任何在前示例的雷达系统,其中2d阵列的第二天线元件被配置成近似矩形形状。
74.示例13:任何在前示例的雷达系统,其中2d阵列的第二天线元件被定位在稀疏阵列中。
75.示例14:任何在前示例的雷达系统,其中第一角度、第二角度、第三角度和第四角度是使用以下各项中的至少一项来确定的:经由旋转不变技术的信号参数估计(esprit)、空间交替广义期望最大化(sage)、延迟及和(ds)、最小方差无失真响应(mvdr)、多信号分类(music)、或基于快速傅里叶变换(fft)波束成形的函数。
76.示例15:任何在前示例的雷达系统,其中雷达系统被配置成用于安装在汽车上。
77.示例16:一种计算机可读存储介质,包括计算机可执行指令,所述计算机可执行指令在被执行时,使雷达系统的处理器:由雷达系统的天线接收由一个或多个对象反射的电磁(em)能量;使用由天线的一维(1d)阵列接收的em能量确定与一个或多个对象相关联的第一角度和第二角度,1d阵列包括被定位在第一方向上的第一天线元件,所述第一天线元件在第一方向上间隔开第一距离和第二距离,第一角度和第二角度在第一方向上;使用由天线的二维(2d)阵列接收的em能量,确定与一个或多个对象相关联的第三角度和第四角度,2d阵列包括至少四个第二天线元件,所述至少四个第二天线元件不被1d阵列包含并且被定位在第一方向和第二方向上,第二方向与第一方向正交,第二天线元件中的至少一些在第二方向上间隔开第三距离并且在第一方向上间隔开第一距离与第二距离的总和,第三角度在第一方向上并且第四角度在第二方向上;并且使用第二角度和第三角度,将第一角度和第四角度与一个或多个对象中的相应对象进行关联。
78.示例17:示例16的计算机可读存储介质,其中:第一角度是基于第一距离确定的;第二角度是基于第一距离与第二距离的总和确定的;并且第三角度是基于第三距离确定的。
79.示例18:示例16或17的计算机可读存储介质,其中第二天线元件在第二方向上间隔开第三距离和第四距离。
80.示例19:示例18的计算机可读存储介质,所述计算机可读存储介质包括进一步的计算机可执行指令,所述进一步的计算机可执行指令在被执行时使雷达系统的处理器:使用由2d阵列接收的em能量确定与一个或多个对象相关联的第五角度,第五角度在第二方向上,其中第一角度和第三角度与一个或多个对象中的相应对象的关联包括:使用第二角度、第四角度和第五角度将第一角度和第三角度与一个或多个对象中的相应对象进行关联。
81.示例20:一种方法,包括:由雷达系统的天线接收由一个或多个对象反射的电磁(em)能量;使用由天线的一维(1d)阵列接收的em能量确定与一个或多个对象相关联的第一角度和第二角度,1d阵列包括被定位在第一方向上的第一天线元件,所述第一天线元件在第一方向上间隔开第一距离和第二距离,第一角度和第二角度在第一方向上;使用由天线的二维(2d)阵列接收的em能量,确定与一个或多个对象相关联的第三角度和第四角度,2d阵列包括至少四个第二天线元件,所述至少四个第二天线元件不被1d阵列包含并且被定位
在第一方向和第二方向上,第二方向与第一方向正交,第二天线元件中的至少一些在第二方向上间隔开第三距离并且在第一方向上间隔开第一距离与第二距离的总和,第三角度在第一方向上并且第四角度在第二方向上;并且使用第二角度和第三角度,将第一角度和第四角度与一个或多个对象中的相应对象进行关联。
82.示例21:一种计算机可读存储介质,包括计算机可执行指令,所述计算机可执行指令在被执行时使处理器执行使用示例1至示例15中任一项的雷达系统的处理器的雷达操作。
83.示例22:一种方法,包括使用如权利要求1至15中任一项所述的雷达系统的处理器来执行雷达操作。结语
84.虽然在前述描述中描述并且在附图中示出了本公开的各种实施例,但应当理解,本公开不限于此,而是可以在接下来的权利要求的范围内以各种方式实施为实践。从前述描述中,将显而易见的是,可以做出各种更改而不偏离由所附权利要求所限定的本公开的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
