1.本发明涉及一种电动作业机中的噪音控制。
背景技术:
2.专利文献1中记载了:为了抑制电动作业机的噪音,使用主动噪音控制(anc)。
3.anc是:使用以音源侧的麦克风测定的声音(以下、参考信号),在想要消音的位置,产生成为逆相位的声音而予以消除的技术。该逆相位的声音使用自适应滤波器而生成。关于滤波器的特性,例如采用filtered-x、nlms算法等自适应算法,逐步计算。
4.在anc中,有别于自适应滤波器而采用了将产生控制音的扬声器至检测控制误差的麦克风为止的路径(以下、二阶系统)的特性进行建模得到的二阶滤波器。自适应滤波器及二阶滤波器使用了数字滤波器。数字滤波器的抽头数基于脉冲响应充分收敛所需要的时间长度,而设定为例如数百左右。
5.现有技术文献
6.专利文献
7.专利文献1:日本特表平6-508695号公报
技术实现要素:
8.设定数字滤波器的系数的自适应算法的计算需要庞大的处理量,并且,与检测到噪音至达到想要消音的位置为止的传播时间相比,需要足够早地完成。因此,在因某些理由而无法使用计算处理能力较高的计算机的情况下,存在很难应用anc的课题。
9.本发明的1个方面的目的在于,能够抑制:用于电动作业机的噪音抑制所需要的计算处理量。
10.本发明的一个方面中的电动作业机具备:马达、参考取得部、噪音控制滤波器、控制音源、误差传感器、二阶滤波器、以及特性调整部。
11.马达构成为:产生出执行预先确定的现场作业所需要的驱动力。参考取得部构成为:取得与由马达的运转所引起的噪音亦即对象噪音之间具有相关性的参考信号。噪音控制滤波器是:包括一系列抽头且能够调整特性的数字滤波器。噪音控制滤波器构成为:从参考取得部接受参考信号,来生成用于消除对象噪音的控制信号。控制音源构成为:按照控制信号而产生疑似噪音。误差传感器构成为:将预先确定的消音点处的疑似噪音和对象噪音的合成音转换为误差信号。二阶滤波器是:将控制音源至误差传感器为止的路径亦即二阶系统事先进行建模得到的包括n个抽头的数字滤波器。二阶滤波器构成为:从参考取得部接受参考信号,生成滤波参考信号。特性调整部构成为:使用误差信号及滤波参考信号,按照自适应算法,来调整噪音控制滤波器的特性。另外,特性调整部构成为:对一系列抽头中的m个抽头的系数进行更新。m个抽头与一系列抽头的一部分或全部相对应。m、n为满足m<n的正整数。
12.根据该构成,能够抑制噪音控制滤波器的发散,并且,能够削减噪音控制滤波器的
抽头数,其结果,能够削减自适应算法的计算处理量。
13.m个抽头可以与一系列抽头的全部相对应。特性调整部可以构成为:对m个抽头全部的系数进行更新。
14.前述的电动作业机可以进一步具备发散判定部,该发散判定部构成为:判定噪音控制滤波器是否趋向于发散。特性调整部可以构成为:在利用发散判定部而判定为噪音控制滤波器趋向于发散之前,对一系列抽头中的l个抽头的系数进行更新。特性调整部可以构成为:在利用发散判定部而判定为噪音控制滤波器趋向于发散之后,将一系列抽头中的第m 1个以后的抽头的系数设定为既定值,对一系列抽头中的第1个至第m个抽头的系数进行更新。l个抽头可以与一系列抽头的全部相对应。l可以为满足l≥n的正整数。
15.既定值可以为:马达至误差传感器为止的路径亦即一阶系统的脉冲响应(impulse response)乘以二阶滤波器的逆滤波得到的值。
16.发散判定部可以构成为:基于误差信号的强度和/或该强度的变化趋势,判定噪音控制滤波器是否趋向于发散。
17.发散判定部可以构成为:基于l个抽头各自的输出强度、和/或l个抽头各自的系数的大小、和/或该系数的更新用的参数的变化趋势,判定噪音控制滤波器是否趋向于发散。
18.l个抽头可以具有与马达至误差传感器为止的路径亦即一阶系统的脉冲响应收敛所需要的时间长度相对应的长度。
19.n个抽头可以构成为:具有能够使疑似噪音的生成所需要的处理结束的长度。疑似噪音的生成所需要的处理中可以包含:在检测到参考信号之后至利用误差传感器检测到成为参考信号的来源的噪音所需要的时间内、特性调整部按照参考信号而对系数进行更新的处理。疑似噪音的生成所需要的处理中可以包含:对系数进行了更新的噪音控制滤波器按照参考信号来生成控制信号的处理。
20.特性调整部可以构成为:当系数的更新次数达到既定值时,将系数的更新停止。
21.特性调整部可以构成为:通过表示使系数变化的程度的更新步长乘以表示使系数变化的方向的梯度矢量得到的更新值,来对系数进行更新。
22.特性调整部可以构成为:使用多个处理循环中计算出的梯度矢量的平均值,来计算出更新值。
23.根据该构成,能够抑制:噪音控制滤波器的系数更新受到外部环境的突发变化的影响。
24.特性调整部可以构成为:根据噪音控制滤波器的收敛状况,使更新步长发生变化。
25.根据该构成,能够进一步抑制噪音控制滤波器的发散。
26.参考取得部可以具备参考传感器,该参考传感器构成为:对对象噪音进行检测而生成参考信号。
27.参考传感器可以配置于:参考传感器与控制音源之间的距离比控制音源与误差传感器之间的距离要长的位置。
28.参考取得部可以构成为:取得对马达进行驱动的驱动信号来作为参考信号。
29.参考取得部可以具备到达滤波器和相加运算部。到达滤波器构成为:具有与二阶滤波器相同的特性,从噪音控制滤波器接受控制信号,来生成表示到达误差传感器的疑似噪音的到达信号。相加运算部可以构成为:将到达信号和误差信号相加来生成参考信号。
30.前述的电动作业机可以具备:风扇、流路、以及排出口。风扇可以构成为:通过马达而被驱动,来产生气流。流路可以构成为:供由风扇产生的气流流动。排出口可以构成为:将气流从流路排出。控制音源及误差传感器可以配置成:排出口成为消音点。
31.在流路的壁面的至少一部分可以设置有:能够抑制因气流冲撞而产生的风噪音的吸音材料。误差传感器可以配置于:夹着吸音材料而与流路对置的位置。
32.根据该构成,能够抑制:利用误差传感器而检测到除了对象噪音以外的噪音,从而能够使通过疑似噪音来抑制对象噪音的抑制精度提高。
33.本发明的另一方面是一种控制由电动作业机产生的噪音的方法,其包括:取得与由电动作业机中的马达的运转所引起的噪音亦即对象噪音之间具有相关性的参考信号的步骤;利用包括一系列抽头且能够调整特性的数字滤波器即噪音控制滤波器,根据参考信号,来生成用于消除对象噪音的控制信号的步骤;按照控制信号,利用控制音源而产生疑似噪音的步骤;利用误差传感器,将预先确定的消音点处的疑似噪音和对象噪音的合成音转换为误差信号的步骤;利用将控制音源至误差传感器为止的路径亦即二阶系统事先进行建模得到的包括n个抽头的数字滤波器亦即二阶滤波器,根据参考信号,来生成滤波参考信号的步骤;以及使用误差信号及滤波参考信号,按照自适应算法,来对一系列抽头中的m个抽头的系数进行更新的步骤。m个抽头与一系列抽头的一部分或全部相对应。m、n为满足m<n的正整数。
附图说明
34.图1是表示第一~第三实施方式所涉及的集尘机的外观的立体图。
35.图2是集尘机主体的底面图。
36.图3是表示从集尘机主体去除上侧外壳的内部状态的立体图。
37.图4是以去除元器件的状态从与上侧外壳之间的接合面侧观察下侧外壳的立体图。
38.图5是以去除元器件的状态从与下侧外壳之间的接合面侧观察上侧外壳的立体图。
39.图6是表示在上侧外壳配置有一部分元器件的位置的状态的立体图。
40.图7是下侧外壳的俯视图。
41.图8是表示集尘机的电气构成的框图。
42.图9是表示前馈型anc系统的模型的框图。
43.图10是表示噪音控制处理的流程图。
44.图11是表示系数更新处理的流程图。
45.图12是表示发散判定处理的流程图。
46.图13是表示第二实施方式中的系数更新处理的流程图。
47.图14是表示第三实施方式中的系数更新处理的流程图。
48.图15是表示步长更新处理的流程图。
49.图16是表示第三实施方式中的发散判定处理的流程图。
50.图17是表示第四实施方式所涉及的便携吸尘器的外观的立体图。
51.图18是便携吸尘器的截面图。
52.图19是表示将便携吸尘器的外壳、以及元器件的一部分去除的状态的立体图,且示出了误差检测话筒、以及控制扬声器的安装状态。
53.图20是表示反馈型anc系统的模型的框图。
54.图21是二阶滤波器的误差研究用的anc的框图。
55.图22是将图21所示的框图变形得到的等效的框图。
56.图23是将图22所示的框图进一步变形得到的等效的框图。
57.符号说明
[0058]1…
集尘机、3
…
主体、6
…
操作装置、7
…
装配件、8
…
便携吸尘器、10
…
噪音控制装置、30
…
外壳、31、81
…
吸引口、32
…
集尘室、33
…
第一流路、34
…
马达室、35
…
第二流路、36
…
排气室、37a
…
第一蓄电池收纳部、37b
…
第二蓄电池收纳部、38
…
元器件配置部、41
…
集尘袋、42
…
滤波器、43、90
…
驱动单元、44
…
驱动控制器、45a、86a
…
第一蓄电池组、45b、86b
…
第二蓄电池组、46、87
…
吸音材料、52
…
连接器、53
…
参考话筒、54、88
…
控制扬声器、55、89
…
误差话筒、61
…
电线、71a
…
第一肩带、71b
…
第二肩带、72
…
腰带、80
…
主体外壳、80a
…
吸引口侧空间、80b
…
排出口侧空间、80c
…
流路、82、361
…
排出口、83
…
把持部、85a
…
第一蓄电池装配部、85b
…
第二蓄电池装配部、84
…
电子开关、91
…
控制电路基板、301
…
下侧外壳、302
…
上侧外壳、303
…
板、304、305、344
…
安装孔、341
…
流入口、342
…
流出口、343
…
壁面、371a
…
第一蓄电池安装口、371b
…
第二蓄电池安装口、381
…
纵长部位、382
…
横长部位、431、903
…
风扇、432、902
…
马达、433
…
消音器、441
…
控制电路、442
…
集尘用电路组、443
…
噪音用电路组、444
…
第一a/d转换器、445
…
第二a/d转换器、446
…
d/a转换器、447
…
电源电路、901
…
马达外壳、911
…
马达控制部、912
…
噪音控制部、m1
…
参考传感器、m2
…
控制音源、m3
…
误差传感器、m4
…
噪音控制滤波器、m5
…
二阶滤波器、m6
…
系数更新部、m7
…
到达滤波器、m8
…
相加运算器。
具体实施方式
[0059]
以下,参照附图,对本发明的例示性的实施方式进行说明。
[0060]
[1.第一实施方式]
[0061]
[1-1.集尘机的构成]
[0062]
对作为电动作业机的一例的集尘机1进行说明。集尘机1以由作业者背着的状态使用。本实施方式中,考虑说明的便利性,针对集尘机1,如图1~图7所示,规定前、后、上、下、左、右。
[0063]
如图1~图7所示,集尘机1具备:主体3、操作装置6、以及装配件7。
[0064]
装配件7具备:第一肩带71a、第二肩带71b、以及腰带72,均安装于主体3的后表面。第一肩带71a及第二肩带71b从主体3的上端且左右两端附近分别延伸设置,并分别安装于作业者的左肩及右肩。腰带72从主体3的下端附近开始延伸设置,并安装于作业者的腰。主体3通过装配件7而被作业者背着。
[0065]
操作装置6包括:用于使集尘机1启动、停止的开关,由作业者进行操作。操作装置6借助电线61而与主体3的下端中央附近连接。
[0066]
主体3具备外壳30。
[0067]
外壳30包括:下侧外壳301、上侧外壳302、以及板303。下侧外壳301为:在前表面具
有开口部的有底容器状的部件。上侧外壳302为:在前表面及后表面具有开口部的框状的部件。板303为:将上侧外壳302的上表面侧的开口部进行封堵的板状的部件。外壳30是通过将例如树脂材料注射成型而成型的。
[0068]
外壳30具备:吸引口31、集尘室32、第一流路33、马达室34、第二流路35、排气室36、第一蓄电池收纳部37a、第二蓄电池收纳部37b、以及元器件配置部38。
[0069]
吸引口31设置于外壳30的上端的中央部。虽然省略图示,不过,在吸引口31连接有挠性软管的第一端部。另外,在软管的第二端部连接有具有吸入口的喷嘴。
[0070]
集尘室32为:在外壳30的上部所设置的矩形的内部空间。集尘室32对与吸引口31连接的集尘袋41进行收纳。集尘袋41例如为纸制的袋,对从吸引口31吸入的尘埃进行捕集。
[0071]
第一流路33沿着集尘室32的右边进行设置,且下端与马达室34连接。在第一流路33与集尘室32之间的边界配置有过滤器42。过滤器42例如为高效微粒空气过滤器(hepa)。
[0072]
马达室34为:在集尘室32的下方设置的矩形的内部空间。马达室34构成为:在右端中央部具有与第一流路33连接的流入口341,在左端上部具有与第二流路35连接的流出口342。在马达室34收纳有驱动单元43。
[0073]
驱动单元43包括:风扇431、马达432、以及消音器433。风扇431与马达432的旋转轴连接,通过对马达432进行驱动而产生出从马达室34的流入口341朝向流出口342的气流。消音器433为:将马达432的周围进行覆盖的环状的部件,对马达432发出的声音进行吸收。消音器433例如采用海绵。应予说明,图3、图6中,马达432被消音器433覆盖,虽然未图示,不过,位于消音器433的中央。
[0074]
第二流路35将马达室34的流出口342和排气室36连接在一起。在第二流路35配置有吸音材料46。吸音材料46设置于:在下侧外壳301内将第二流路35和集尘室32分隔开的壁面。作为吸音材料46,例如采用海绵。
[0075]
排气室36为:在马达室34的左侧设置的内部空间,在外壳30的下表面具有狭缝状的排出口361。
[0076]
像这样构成的主体3中,当使驱动单元43驱动而产生出气流时,经由吸引口31、以及与吸引口31连接的软管、喷嘴,从外壳30的外部空间向外壳30的内部空间吸入外部大气。所吸引的外部大气首先到达集尘室32,再从在吸引口31所安装的集尘袋41通过,由此对外部大气中包含的尘埃进行捕捉。通过集尘袋41的空气经由过滤器42而到达第一流路33。在过滤器42中,对集尘袋41无法捕捉的更细的尘埃进行捕捉。到达第一流路33的空气从马达室34及第二流路35通过而到达排气室36,经由排出口361而向外壳30的外部空间排出。
[0077]
第一蓄电池收纳部37a为:对第一蓄电池组45a进行收纳的空间,其设置于外壳30的下端附近,具有:在外壳30的下端左端附近呈开口的第一蓄电池安装口371a。第二蓄电池收纳部37b为:对第二蓄电池组45b进行收纳的空间,其设置于外壳30的下端附近,具有:在外壳30的下端右端附近呈开口的第二蓄电池安装口371b。第一及第二蓄电池组45a、45b分别从第一及第二蓄电池安装口371a、371b插入于第一及第二蓄电池收纳部37a、37b。第一及第二蓄电池组45a、45b为:能够作为各种电动作业机的电源使用的通用蓄电池。
[0078]
元器件配置部38为:位于马达室34以及第二流路35、排气室36与第一及第二蓄电池收纳部37a、37b之间的内部空间,其中配置有各种电气元器件。元器件配置部38具有:纵长部位381、以及与该纵长部位381连通的横长部位382,其中,该纵长部位381通过分别形成
马达室34以及第二流路35、排出口361的壁面而将3个方向进行包围,该横长部位382被马达室34和第一及第二蓄电池收纳部37a、37b夹着。
[0079]
在横长部位382配置有连接器52和参考话筒(以下、参考麦克风)53。
[0080]
连接器52配置于第一蓄电池收纳部37a与第二蓄电池收纳部37b之间,设置连接器52的目的在于,将操作装置6所具有的电线61、与内部电路连接。
[0081]
参考麦克风53利用形成在壁面343的第一安装孔344,以使得参考麦克风53的指向性朝向马达室34的内侧的方式进行安装,其中,壁面343成为与马达室34之间的边界。参考麦克风53对外壳30内产生的对象噪音进行检测。具体而言,对象噪音包括:由驱动单元43的马达432、风扇431产生的噪音、以及利用驱动单元43产生的气流而产生的噪音。
[0082]
纵长部位381中配置有:控制扬声器54、误差话筒(以下、误差麦克风)55、以及驱动控制器44。控制扬声器54及误差麦克风55利用在下侧外壳301的下表面形成的第二安装孔304及第三安装孔305,以使得控制扬声器54及误差麦克风55的指向性朝向外壳30的外侧的方式进行安装。如图7所示,驱动控制器44安装于:成为纵长部位381与马达室34之间的边界的壁面。驱动控制器44为:进行电源控制、马达控制、噪音控制等的电路基板,下文中,对其详细情形进行说明。
[0083]
应予说明,误差麦克风55配置于:成为消音点的排出口361的附近,即,误差麦克风55配置于:视为存在消音点的位置、且是由驱动单元43产生的气流不会直接冲撞的位置。控制扬声器54配置于:由控制扬声器54发出的疑似噪音的相位在消音点和误差麦克风55的位置成为相同相位的位置。此外,参考麦克风53及控制扬声器54、误差麦克风55配置成:由控制扬声器54辐射的疑似噪音到达消音点所需要的时间比对象噪音直接到达消音点所需要的时间要短。亦即,在该时间差期间执行:生成疑似噪音的处理。
[0084]
控制扬声器54朝向外壳30之外辐射疑似噪音,误差麦克风55对从排出口361排出的对象噪音和疑似噪音合成得到的声音进行检测。控制扬声器54具有:发出与对象噪音相比足够大的声音的能力。误差麦克风55具有:能够无失真地接收对象噪音与疑似噪音的合成音的能力。
[0085]
[1-2.驱动控制器]
[0086]
如图8所示,驱动控制器44包括:控制电路441、集尘用电路组442、噪音用电路组443、以及电源电路447。
[0087]
电源电路447将从第一及第二蓄电池组45a、45b供给来的电力以适当的电压向各部分分配。
[0088]
本第一实施方式的控制电路441为微计算机的形态。因此,控制电路441具备:cpu441a、以及存储器441b。在控制电路441中,代替微计算机,可以具备:例如分立元件等这样的电子元器件的组合,也可以具备:数字信号处理器(dsp)、面向特定用途的集成电路(asic),还可以具备:面向特定应用的通用品(assp),还可以具备:现场可改写的门阵列(fpga)等可编程逻辑器件,或者还可以具备它们的组合;或者,控制电路441中,除了具备微计算机以外,可以具备:例如分立元件等这样的电子元器件的组合,也可以具备:数字信号处理器(dsp)、面向特定用途的集成电路(asic),还可以具备:面向特定应用的通用品(assp),还可以具备:现场可改写的门阵列(fpga)等可编程逻辑器件,或者还可以具备它们的组合。
[0089]
集尘用电路组442为:发挥作为集尘机的功能所需要的各种电路。集尘用电路组442包括:马达驱动电路、蓄电池切换电路、以及异常检测电路。马达驱动电路为对马达432进行驱动的电路。蓄电池切换电路为:根据第一及第二蓄电池组45a、45b的充电余量而将电力的供给源适当切换给第一及第二蓄电池组45a、45b中的任一者的电路。异常检测电路为:对与马达432的驱动相关的各种异常进行检测的电路。
[0090]
驱动用电路组443为:发挥作为噪音控制装置的功能所需要的各种电路。噪音用电路组443包括:第一模拟/数字(a/d)转换器444、第二a/d转换器445、以及数字/模拟(d/a)转换器446。
[0091]
第一a/d转换器444对参考麦克风53的检测信号进行a/d转换而向控制电路441供给。第二a/d转换器445对误差麦克风55的检测信号进行a/d转换而向控制电路441供给。d/a转换器446对从控制电路441输出的控制数据进行d/a转换而生成向控制扬声器54供给的控制信号。
[0092]
控制电路441执行如下处理,即,对集尘用电路组442进行控制,而实现作为集尘机1的功能的处理、以及实现对集尘机1发出的噪音进行抑制的作为噪音控制装置10的功能的处理亦即噪音抑制处理。
[0093]
亦即,噪音控制装置10具备:执行噪音抑制处理的控制电路441、噪音用电路组443、参考麦克风53、控制扬声器54、以及误差麦克风55。
[0094]
控制电路441通过噪音控制处理,来实现前馈型的主动噪音控制(以下、anc)。
[0095]
[1-3.anc模型]
[0096]
对噪音控制装置10所实现的前馈型anc的模型进行说明。
[0097]
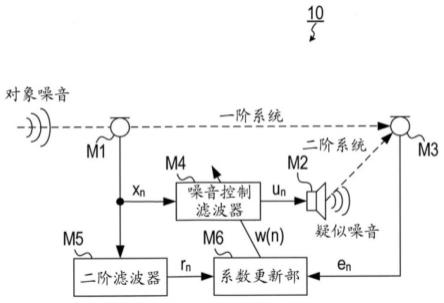
如图9所示,前馈型anc的模型具备:参考传感器m1、控制音源m2、误差传感器m3、噪音控制滤波器m4、二阶滤波器m5、以及系数更新部m6。应予说明,参考传感器m1相当于参考麦克风53以及第一a/d转换器444。控制音源m2相当于d/a转换器446以及控制扬声器54。误差传感器m3相当于误差麦克风55以及第二a/d转换器445。另外,噪音控制滤波器m4以及二阶滤波器m5、系数更新部m6均可以通过控制电路441的处理来实现。不过,噪音控制滤波器m4以及二阶滤波器m5、系数更新部m6的一部分或全部也可以通过硬件来实现。
[0098]
参考传感器m1对对象噪音进行检测而生成参考信号xn。n表示第n个采样数据。
[0099]
噪音控制滤波器m4为:包括l个抽头的fir滤波器。l为正整数。噪音控制滤波器m4根据以最近检测到的l个参考信号{xn、x
n-1
、
…
、x
n-l 1
}为要素的l维的参考矢量x(n),来生成控制信号un。
[0100]
控制音源m2按照控制信号un而产生疑似噪音。
[0101]
误差传感器m3对对象噪音与疑似噪音的合成音进行检测而生成误差信号en。
[0102]
以下,将参考传感器m1至误差传感器m3为止的声音的传播路径称为一阶系统,将控制音源m2至误差传感器m3为止的声音的传播路径称为二阶系统。
[0103]
二阶滤波器m5为:包括n个抽头的fir滤波器。n为正整数。二阶滤波器m5根据以最近检测到的n个参考信号{xn、x
n-1
、
…
、x
n-n 1
}为要素的n维的参考矢量x(n),生成滤波参考信号rn。二阶滤波器m5为:将二阶系统的传递特性进行建模得到的滤波器,各抽头的系数使用固定值。滤波参考信号rn是:将疑似噪音到达误差传感器m3时附加给疑似噪音的二阶系统的影响成分提供给参考信号xn而得到的信号。
[0104]
系数更新部m6在误差传感器m3的位置(即、消音点)对噪音控制滤波器m4中包含的l个抽头的系数{w1、w2、
…
、w
l
}进行更新,以使得对象噪音和疑似噪音相互抵消,误差信号en最小。以下,将以系数{w1、w2、
…
、w
l
}为要素的l维的矢量称为系数矢量w(n)。
[0105]
噪音控制滤波器m4的系数更新可以使用例如作为自适应算法之一的filtered-x nlms算法。
[0106]
噪音控制装置10中,噪音控制滤波器m4的抽头数l具有:与一阶系统的脉冲响应充分收敛的时间相当的大小,设定为:数百~一千数百左右。二阶滤波器m5的抽头数n根据l≥n且能够在由噪音控制处理分配的控制电路441的处理时间内使噪音控制处理结束的大小、亦即控制电路441的处理能力,进行设定。另外,二阶滤波器m5的抽头数n设定为:比与二阶系统的脉冲响应充分收敛的时间对应的数量要小的值。亦即,二阶滤波器m5重现将脉冲响应的后半部分除去后的近似的特性。
[0107]
以下,在噪音控制滤波器m4及二阶滤波器m5中,将处理最新信号的抽头设为第1个抽头,越追溯过去的信号,处理该信号的抽头的编号越大。另外,将编号较小侧的抽头称为上位的抽头,将编号较大侧的抽头称为下位的抽头。
[0108]
另外,将通过自适应算法更新的噪音控制滤波器m4的系数趋向于发散时所使用的噪音控制滤波器m4的抽头数设为m。m为满足m≤n的正整数,使用以下方法,通过模拟等,以实验事先确定。
[0109]
例如,将根据事先推定的一阶系统的脉冲响应p和二阶系统的脉冲响应c计算出的传递特性(以下、理论特性)p/c假定为噪音控制滤波器m4的真值。并且,在检测到趋向于发散时,可以将除了相对于真值而言的偏离为既定值以上的噪音控制滤波器m4的下位的抽头以外的剩余抽头的数量设为m。
[0110]
另外,例如,关于噪音控制滤波器m4的各抽头的系数w1~w
l
,从下位的抽头开始按顺序计算出平方和,与剩余的上位的抽头的平方和进行比较。并且,可以直至下位的抽头的平方和成为上位的抽头的平方和的值的既定值(例如、1/2)以下为止,将除去下位的抽头的剩余抽头的数量设为m。
[0111]
[1-4.处理]
[0112]
[1-4-1.噪音抑制处理]
[0113]
使用图10的流程图,对控制电路441执行的噪音控制处理进行说明。在与第一a/d转换器444及第二a/d转换器445的采样周期相同的周期内,执行噪音控制处理。采样周期设定为:与对象噪音的最大频率的2倍的频率相对应的周期。另外,将执行噪音控制处理的周期称为处理循环。
[0114]
控制电路441为了噪音控制滤波器m4的计算而使用对l个参考信号xn(即、l维的参考矢量x(n))进行依次存储的移位寄存器。控制电路441为了二阶滤波器m5的计算而使用对n个参考信号xn~x
n-n 1
(即、n维的参考矢量x(n))进行依次存储的移位寄存器。控制电路441为了系数更新部m6的计算而使用对l个滤波参考信号rn~r
n-l 1
(即、滤波参考矢量r(n))进行依次存储的移位寄存器。另外,控制电路441使用l个寄存器,其中,l个寄存器对系数更新部m6的处理结果、且是向噪音控制滤波器m4供给的l个系数w1~w
l
(即、系数矢量w(n))进行存储。wi为第i个抽头的系数。
[0115]
在控制电路441启动时,发散标志fl初始化为:表示断开的fl=0,噪音控制滤波器
m4中包含的l个抽头的系数、亦即系数矢量w(n)初始化为预先设定的初始值。发散标志fl是:在系数矢量w(n)的更新值没有收敛而趋向于发散的情况下,设定为表示接通的fl=1的标志。系数矢量w(n)的初始值可以使用例如表示理论特性p/c的值,也可以使用任意设定的值(例如、全部1等)。
[0116]
当噪音抑制处理开始时,如图10所示,s110中,控制电路441取得参考信号xn,将所取得的参考信号xn分别存储于噪音控制滤波器m4用的移位寄存器、以及二阶滤波器m5用的移位寄存器。
[0117]
接下来的s120中,控制电路441执行:作为噪音控制滤波器m4的处理。具体而言,控制电路441使用噪音控制滤波器m4用的移位寄存器中所存储的参考矢量x(n)、和系数更新部m6的输出用的寄存器中所存储的系数矢量w(n),按照(1)式,计算出控制信号un。
[0118]
【数学式1】
[0119][0120]
接下来的s130中,控制电路441执行:按照自适应算法而对噪音控制滤波器m4的系数矢量w(n)进行更新的系数更新处理。
[0121]
接下来的s140中,控制电路441执行:根据通过系数更新处理计算出的系数矢量w(n)是否表示趋向于发散来调整噪音控制滤波器m4的构成的发散判定处理。
[0122]
接下来的s150中,控制电路441将s120中计算出的控制信号un向d/a转换器446输出,结束处理。利用d/a转换器446而转换为模拟信号的控制信号un向控制扬声器54供给,由控制扬声器54产生与控制信号un相对应的疑似噪音。
[0123]
[1-4-2.系数更新处理]
[0124]
使用图11的流程图,对控制电路441在之前的s130中执行的系数更新处理进行说明。
[0125]
当系数更新处理开始时,在s210中,控制电路441执行:作为二阶滤波器m5的处理。具体而言,控制电路441使用二阶滤波器m5用的移位寄存器中所存储的n维的参考矢量x(n)、和二阶滤波器m5的抽头中预先设定的n个系数c1~cn,按照(2)式,计算出滤波参考信号rn。控制电路441将所计算出的滤波参考信号rn存储于系数更新部m6用的移位寄存器。
[0126]
【数学式2】
[0127][0128]
接下来的s220中,控制电路441计算出:系数更新部m6用的移位寄存器中所存储的滤波参考矢量r(n)中包含的l个要素的平方和rn。滤波参考矢量r(n)是:以最近刚刚计算出的l个滤波参考信号{rn、r
n-1
、
…
、r
n-l 1
}为要素的l维的矢量。以下,将该平方和rn称为标准化值。
[0129]
接下来的s230中,控制电路441取得误差信号en。误差信号en为标量值。接下来的s240中,控制电路441计算出梯度矢量s(n)。
[0130]
如(3)式所示,梯度矢量s(n)是:系数更新部m6用的移位寄存器中所存储的滤波参考矢量r(n)、与s230中取得的误差信号en之积。梯度矢量s(n)表示:在表示系数矢量w(n)的
l维坐标空间内使系数矢量w(n)变化的方向。
[0131]
【数学式3】
[0132]
s(n)=en×
r(n)
ꢀꢀꢀ
(3)
[0133]
接下来的s250中,控制电路441使用(4)式对系数矢量w(n)进行更新,将所更新的系数矢量w(n 1)存储于系数更新部m6的输出用寄存器,由此向噪音控制滤波器m4供给,来结束处理。μ为对自适应动作的收敛速度和推定精度进行调整的标量值,称为更新步长。
[0134]
【数学式4】
[0135][0136]
[1-4-3.发散判定处理]
[0137]
使用图12的流程图,对控制电路441在之前的s140中执行的发散判定处理进行说明。
[0138]
当发散判定处理开始时,在s310中,控制电路441判定发散标志fl是否设定为接通(即、fl=1)。控制电路441在得到肯定判定的情况下结束处理,在得到否定判定的情况下将处理进入s320。
[0139]
在s320中,控制电路441取得发散判定参数。发散判定参数是:用于判定s130中更新的系数矢量w(n)是否趋向于发散的参数。发散判定参数使用以下示出的第一判定参数~第三判定参数中的至少一个。
[0140]
第一判定参数是:将噪音控制滤波器m4中包含的l个抽头分隔为上位抽头和下位抽头,且上位抽头的系数的大小减去下位抽头的系数的大小得到的值。此处的上位抽头为第1个至第m个的m个抽头,下位抽头为第m 1个至第l个的l-m个抽头。系数的大小可以使用例如各系数的平方和,也可以使用各系数的绝对值的和。此处,将上位抽头的数量设为m个,不过,上位抽头的数量不限定于m个。
[0141]
第二判定参数为误差信号en的绝对值。
[0142]
第三判定参数是:更新前的系数矢量w(n)减去更新后的系数矢量w(n 1)得到的差分矢量的大小。差分矢量的大小可以使用差分矢量中包含的各要素的平方和,也可以使用各要素的绝对值的和。
[0143]
接下来的s330中,控制电路441使用s320中取得的发散判定参数,判定噪音控制滤波器m4的系数是否趋向于发散,在得到肯定判定的情况下将处理进入s340,在得到否定判定的情况下结束处理。
[0144]
具体而言,作为发散判定用参数而使用第一判定参数的情况下,如果第一判定参数为负值,即下位抽头大于上位抽头,则可以判定为趋向于发散。
[0145]
作为发散判定用参数而使用第二判定参数的情况下,如果第二判定参数相对于装置所容许的最大噪音值而言为一定值(例如、2倍)以上,则可以判定为趋向于发散。另外,如果第二判定参数在多次(例如、3次)的处理循环中单调增加,则可以判定为趋向于发散。
[0146]
作为发散判定用参数而使用第三判定参数的情况下,如果第三判定参数在多次(例如、3次)的处理循环中单调增加,则可以判定为趋向于发散。
[0147]
应予说明,发散趋势判定中,可以使用第一判定参数至第三判定参数中的任意一
个参数,也可以将多个参数组合使用。将多个参数组合使用的情况下,当多个参数中只要有一个满足时,可以判定为趋向于发散;当任意多个参数满足时,也可以判定为趋向于发散。
[0148]
在s340中,控制电路441对噪音控制滤波器m4进行限制。具体而言,作为噪音控制滤波器m4的第m 1个至第l个为止的l-m个下位抽头的系数w
m 1
~w
l
,设定固定值。固定值可以使用例如表示理论特性p/c的下位抽头的系数。固定值可以设定为任意值。另外,也可以将噪音控制滤波器m4的l-m个下位抽头设为无效抽头,将第1个至第m个的m个上位抽头设为有效抽头,使用有效抽头,计算出控制信号un。在s340中,对噪音控制滤波器m4进行了限制的情况下,控制电路441在以后的处理循环中,当执行s120时,使用进行了限制的噪音控制滤波器m4来生成控制信号un。
[0149]
接下来的s350中,控制电路441将发散标志fl设定为表示检测到发散趋势的接通(即、fl=1),结束处理。
[0150]
亦即,当判定为噪音控制滤波器m4的系数矢量w(n)趋向于发散时,对噪音控制滤波器m4进行限制,之后,无需解除限制,继续进行使用进行了限制的噪音控制滤波器m4来计算控制信号un。
[0151]
[1-5.术语的对应]
[0152]
本实施方式中,参考麦克风53以及第一a/d转换器444(即、参考传感器m1)相当于本发明中的参考取得部的一例,s220~s250以及s340的处理相当于本发明中的特性调整部的一例,s320~s330的处理相当于本发明中的发散判定部的一例。
[0153]
[1-6.效果]
[0154]
根据以上详述的第一实施方式,发挥出以下的效果。
[0155]
(1a)本实施方式中,二阶滤波器m5的抽头数n设定为:比与脉冲响应充分收敛的时间相当的长度要短,因此,能够削减噪音控制所需要的计算处理量。
[0156]
(1b)本实施方式中,检测发散趋势之前,对控制信号un生成用的噪音控制滤波器m4中包含的l个抽头全部的系数w1~w
l
进行更新。另外,检测发散趋势之后,将下位抽头的系数w
m 1
~w
l
设定为固定值或进行无效化,对上位抽头的系数w1~wm进行更新。因此,即便二阶滤波器m5的抽头数n被设定为不充分的长度从而包含无法忽视的推定误差的情况下,也能够抑制噪音控制滤波器m4的系数发散。
[0157]
(1c)本实施方式中,误差麦克风55配置于:由驱动单元43产生的气流直接冲撞导致的风噪音等、除了对象噪音以外的噪音向误差麦克风55中混入得以抑制的位置。另外,误差麦克风55配置于视为消音点的位置。控制扬声器54配置成:控制扬声器54产生的疑似噪音的相位在消音点和误差麦克风55的位置成为相同相位。其结果,能够提高由参考麦克风53检测的参考信号xn、与由误差麦克风55检测的误差信号en之间的相干性,从而能够使抑制对象噪音的控制精度提高。
[0158]
[1-7.二阶滤波器的误差对噪音控制滤波器的系数带来的影响]
[0159]
在检测到发散趋势时,对噪音控制滤波器m4进行限制,由此抑制发散,以下,对其原理进行说明。
[0160]
二阶滤波器m5的误差(以下、二阶系统推定误差)表示:二阶系统的实际特性与由二阶滤波器m5表现出的特性之差。此处,首先示出二阶系统推定误差对噪音控制滤波器m4的系数也带来较大影响。
[0161]
图21~图23中,p(z)表示从参考传感器m1到达误差传感器m3的一阶系统的特性的z变换。h(z)表示噪音控制滤波器m4的特性的z变换。c(z)表示从噪音控制滤波器m4的输出且经由控制音源m2而到达误差传感器m3的二阶系统的特性的z变换。ch(z)表示在anc动作开始前推定出二阶系统的特性c(z)并对系数进行固定后的二阶滤波器m5的特性的z变换。n(z)表示对象噪音的z变换。nlms表示基于学习鉴别法的系数更新部m6。该研究中,可以忽视从控制音源m2到达参考传感器m1的返回系统b(z)。这种情况下,前馈型anc的结构以图21表示。
[0162]
利用系数更新部m6缓慢地进行噪音控制滤波器m4的系数更新的情况下,噪音控制滤波器m4可以假定为线性滤波器,从理论来讲,如图22所示,可以调换二阶系统和噪音控制滤波器m4的连接顺序。
[0163]
其中,一阶系统的特性p(z)置换为(5)式所示的pd(z)。
[0164]
【数学式5】
[0165][0166]
图22所示的结构中,如果二阶系统的特性c(z)以零误差进行事先推定,则一阶系统和噪音控制滤波器m4的输入信号、系数更新部m6中应用的信号全部一致。这种情况下,噪音控制滤波器的特性h(z)向一阶系统的特性pd(z)收敛而调整为(6)式所示的hopt(z)时,理论上,对象噪音完全被抵消。以下,将hopt(z)称为最佳噪音控制滤波器的特性。
[0167]
【数学式6】
[0168][0169]
实用时,二阶系统的推定值(即、二阶滤波器m5的特性)ch(z)相对于实际的二阶系统的特性c(z)而包含误差δ(z)。因此,二阶滤波器m5的特性ch(z)以(7)式表示。
[0170]
【数学式7】
[0171]
ch(z)=c(z) δ(z)
ꢀꢀꢀ
(7)
[0172]
为了考察误差δ(z)的影响,图22中,将在噪音控制滤波器m4的输入侧与一阶系统连接的二阶系统的特性c(z)置换为二阶滤波器m5的特性ch(z)。这种情况下,如图23所示,一阶系统的特性pd(z)变为(8)式所示的特性ph(z)。
[0173]
【数学式8】
[0174][0175]
由图23可知:调整噪音控制滤波器m4的特性h(z)以使得满足(9)式时,即噪音控制滤波器m4的特性h(z)收敛为(10)式时,理论上,对象噪音完全被抵消。
[0176]
【数学式9】
[0177]
[0178][0179]
但是,实际上,由于无法分离为c(z)/ch(z)和噪音控制滤波器m4的特性ph(z),所以,针对噪音控制滤波器m4的特性,对系数进行更新,以使得向(11)式所示的hd(z)收敛。其中,δd(z)以(12)式表示。
[0180]
【数学式10】
[0181][0182][0183]
由(11)(12)式可知:二阶系统推定误差δ(z)不是单纯的相加运算,而是以与最佳噪音控制滤波器的特性hopt(z)的折积的形式,引入到噪音控制滤波器m4的特性hd(z)中,使噪音降低效果降低。
[0184]
为了能够明确该折积所引起的噪音降低效果劣化的程度,将最佳噪音控制滤波器的特性hopt(z)与收敛后的噪音控制滤波器m4的特性hd(z)之差示于(13)式。
[0185]
【数学式11】
[0186][0187]
由(13)式可知:δd(z)足够小的情况下,收敛后的噪音控制滤波器m4的特性hd(z)与最佳噪音控制滤波器的特性hopt(z)之差为hopt(z)与δd(z)的折积。
[0188]
若对(11)式进行变形,则得到(14)式。
[0189]
【数学式12】
[0190][0191]
像这样,二阶滤波器m5的特性ch(z)相对于实际的二阶系统的特性c(z)而包含误差的情况下,关于由anc带来的噪音降低效果,会产生出:与(14)式的右边所示的第二项以后的项相对应的降低。
[0192]
接下来,对无法充分准备二阶滤波器m5的抽头数的情形进行说明。无法充分准备
抽头数意味着:比与脉冲响应充分收敛所需要的时间相对应的抽头数要少。
[0193]
无法充分准备二阶滤波器m5的抽头数的情况下,误差δ(z)变大。将二阶滤波器m5的抽头数设为d的情况下,二阶滤波器m5的特性ch(z)以(15)式表示。
[0194]
【数学式13】
[0195]
ch(z)=c(z)-δ(z)
·
z-d
=c(z){1-δd(z)z-d
}
ꢀꢀꢀ
(15)
[0196]
δ(z)z
-d
表示二阶系统的脉冲响应中截止的部分的z变换。为了方便,假定为:d-1以前的抽头系数以零误差进行推定。
[0197]
这种情况下,收敛后的噪音控制滤波器的特性hd(z)以(16)式表示,与最佳噪音控制滤波器的特性hopt(z)之差与(14)式的情形同样地以右边的第二项以后的项表示。
[0198]
【数学式14】
[0199][0200]
由(16)式可知:截止所带来的影响限定于噪音控制滤波器m4的系数的第d个以后。该结果意味着:无法准备出对于二阶滤波器m5而言足够的抽头数的情况下,通过使噪音控制滤波器m4的抽头数也为与二阶滤波器m5的抽头数d相同程度以下,能够得到噪音降低效果。
[0201]
[2.第二实施方式]
[0202]
[2-1.与第一实施方式之间的不同点]
[0203]
关于第二实施方式,基本构成与第一实施方式相同,因此,以下对不同点进行说明。应予说明,与第一实施方式相同的符号表示同一构成,参照现有的说明。
[0204]
前述的第一实施方式中,每个处理循环中,都对噪音控制滤波器m4的系数进行持续更新。与此相对,第二实施方式中,针对多个处理循环(以下、区间)中,对噪音控制滤波器m4的系数进行一次更新,更新次数也被限制,这一点与第一实施方式不同。
[0205]
[2-2.处理]
[0206]
使用图13的流程图,对第二实施方式的噪音控制装置10代替图11所示的第一实施方式的系数更新处理而执行的系数更新处理进行说明。应予说明,对与图11所示的处理相同的处理标记相同的步骤编号,并省略说明。另外,在噪音控制装置10启动时,计数值kc、jc以及累积值sr、ss均初始化为零。
[0207]
当系数更新处理开始时,在s200中,控制电路441判定:更新次数计数器的计数值kc是否小于更新上限次数kmax,在得到肯定判定的情况下,将处理进入s210,在得到否定判定的情况下,结束处理。
[0208]
s210的处理与第一实施方式的情形相同。
[0209]
接下来的s222中,控制电路441与s220中的处理同样地,计算出标准化值rn,进而,计算出标准化值rn的累积值sr。
[0210]
接下来的s230的处理与第一实施方式的情形相同。
[0211]
接下来的s242中,控制电路441与s240中的处理同样地,计算出梯度矢量s(n),进而,计算出梯度矢量s(n)的累积值ss。
[0212]
接下来的s244中,控制电路441使区间计算计数器的计数值jc增加1个。
[0213]
接下来的s246中,控制电路441判定:计数值jc是否为区间计算次数j
bk
以上,在得到肯定判定的情况下,将处理进入s250,在得到否定判定的情况下,结束处理。
[0214]
s250的处理与第一实施方式的情形相同。不过,(5)式中,使用累积值sr代替rn,使用累积值rs代替s(n)。
[0215]
接下来的s260中,控制电路441对区间计算计数器的计数值jc进行清零,并且,使更新次数计数器的计数值kc增加1个,结束处理。
[0216]
亦即,在每j
bk
次处理循环(以下、区间)中,使用这期间计算出并被累积的标准化值rn的累积值sr、以及梯度矢量s(n)的累积值ss,对噪音控制滤波器m4进行更新。并且,噪音控制滤波器m4的更新反复进行kmax次时,结束更新。
[0217]jbk
及kmax基于模拟等实验结果而设定为能够使误差信号en充分减小的次数即可。
[0218]
[2-3.术语的对应]
[0219]
本实施方式中,图13所示的系数更新处理中的除了s210以外的处理相当于本发明中的特性调整部的一例。
[0220]
[2-4.效果]
[0221]
根据以上详述的第二实施方式,发挥出前述的第一实施方式的效果(1a)(1b)(1c),此外,发挥出以下效果。
[0222]
(2a)本实施方式中,噪音控制滤波器m4的系数矢量w(n)的更新使用了通过区间计算而得到的标准化值rn的累积值sr、以及梯度矢量s(n)的累积值ss。因此,即便标准化值rn以及梯度矢量s(n)因干扰而瞬时显示异常值,也能够抑制其影响,从而能够使被更新的系数矢量w(n)的稳定性提高。
[0223]
(2b)本实施方式中,将噪音控制滤波器m4的系数矢量w(n)的更新次数限制为kmax。因此,能够抑制:在系数矢量w(n)的值收敛后,白白继续系数矢量w(n)的更新。应予说明,噪音控制滤波器m4的系数矢量w(n)的更新次数也可以无限制。
[0224]
[3.第三实施方式]
[0225]
[3-1.与第一实施方式之间的不同点]
[0226]
关于第三实施方式,基本构成与第二实施方式相同,因此,以下对不同点进行说明。应予说明,与第二实施方式相同的符号表示同一构成,参照现有的说明。
[0227]
前述的第一及第二实施方式中,作为噪音控制滤波器m4的系数矢量w(n)的更新用的更新步长μ,使用固定值。与此相对,第三实施方式中,对更新步长μ进行可变设定,并且,根据更新步长μ的偏差来判定发散趋势,这一点与第一及第二实施方式不同。
[0228]
[3-2.处理]
[0229]
[3-2-1.系数更新处理]
[0230]
使用图14的流程图,对第三实施方式的噪音控制装置10代替图13所示的第二实施方式的系数更新处理而执行的系数更新处理进行说明。
[0231]
本实施方式的系数更新处理中,在s246得到肯定判定的情况下,执行s252的系数/步长更新处理,以此代替执行s250。
[0232]
[3-2-2.系数/步长系数更新处理]
[0233]
使用图15所示的流程图,对控制电路441在s252执行的系数/步长更新处理进行说明。
[0234]
当系数/步长更新处理开始时,在s410中,控制电路441以区间单元计算出:作为除了对象噪音以外的噪音的信号功率的干扰功率q
kc
、和对象噪音的信号功率p
kc
。干扰功率q
kc
使用了将误差信号en的平方值在区间期间累积的值。信号功率p
kc
使用了将参考矢量x(n)中包含的多个参考信号xn的平方和在区间期间累积的值。
[0235]
接下来的s420中,控制电路441按照(17)式对更新步长μ
kc
进行更新。i
tp
为噪音控制滤波器m4的抽头数,j
bk
为区间长,g为推定误差的所需值。推定误差为:二阶滤波器m5的特性ch(z)相对于实际的二阶系统的特性c(z)的误差δ(z)等。所需值g为:确定推定误差的最低限度的精度的参数,取1>g>0的值。初始值g0为任意值,设定为接近于1的值,例如为0.9。
[0236]
【数学式15】
[0237][0238]
接下来的s430中,控制电路441对噪音控制滤波器m4的系数矢量w(kc)进行更新。该处理中,作为更新步长,使用s420中计算出的μ
kc
来代替固定值μ,除此以外,与s250中的处理相同。
[0239]
接下来的s440中,控制电路441计算出s430中更新的噪音控制滤波器m4的系数矢量w(kc)的大小的变化量(以下、系数变化量)d
kc
。系数矢量w(kc)的大小可以使用例如全部要素的平方和,也可以使用全部要素的绝对值之和。
[0240]
接下来的s450中,控制电路441判定:系数变化量d
kc
是否大于预先设定的判定阈值th。控制电路441在得到肯定判定的情况下将处理进入s460,在得到否定判定的情况下结束处理。
[0241]
s460中,控制电路441按照(18)(19)式对作为更新步长μ
kc
的更新用的参数的所需值gx以及判定阈值th进行更新,结束处理。
[0242]
【数学式16】
[0243]
gx
←agx
·
gx
ꢀꢀꢀ
(18)
[0244]
th
←bth
·
th
ꢀꢀꢀ
(19)
[0245]agx
为所需值调整系数,设定为1>a
gx
>0。b
th
为阈值调整系数,设定为1>b
th
>0。所需值调整系数a
gx
以及阈值调整系数b
th
均设定为接近于1的值,例如为0.9等,以使得所需值gx以及判定阈值th的变化变小。
[0246]
如以上所说明,系数/步长更新处理中,进行:噪音控制滤波器m4的系数矢量w(kc)以及系数矢量w(kc)的计算所使用的更新步长μ
kc
的更新。此外,系数/步长更新处理中,也进行:更新步长μ
kc
的调整所使用的所需值gx以及判定阈值th的调整。
[0247]
在系数矢量w(kc)的变化量d
kc
大于判定阈值th(即、趋向于发散)的情况下,反复进行:使更新步长μ
kc
的调整所使用的所需值gx以及判定阈值th呈阶段性地减小的操作,由此进行所需值gx以及判定阈值th的调整。
[0248]
如果使所需值gx减小,则所计算出的更新步长μ
kc
也较小,其结果,所计算出的系数矢量w(kc)的变动量d
kc
也较小,由此发散得以抑制。不过,当所计算出的变动量d
kc
较小时,难以检测发散趋势,无论发散趋势是否持续,都有可能无法检测到。因此,根据所需值gx而
进行:发散趋势判定所使用的判定阈值th也减小的调整。
[0249]
[3-2-3.发散判定处理]
[0250]
使用图16的流程图,对控制电路441在s140执行的发散判定处理进行说明。执行该发散判定处理来代替第一及第二实施方式中控制电路441执行的图12所示的发散判定处理。
[0251]
如图16所示,当发散判定处理开始时,在s510中,控制电路441判定:噪音控制滤波器m4的有效抽头数i
tp
是否大于下限有效数tpmin,在得到肯定判定的情况下,将处理进入s520,在得到否定判定的情况下,结束处理。有效抽头数i
tp
为:成为系数更新部m6的更新对象的噪音控制滤波器m4的抽头数。下限有效数tpmin设定为:例如二阶滤波器m5的抽头数n以下。不过,下限有效数tpmin可以设定为:大于二阶滤波器m5的抽头数n的值。
[0252]
在s520中,控制电路441与s330的处理同样地,判定:噪音控制滤波器m4是否趋向于发散。不过,在发散趋势的判定中除了使用第一~第三判定参数以外,还可以使用s440中计算出的系数变化量d
kc
以及s420中计算出的更新步长μ
kc
的偏差量(例如、与前次值之差的绝对值|μ
kc
-μ
kc-1
|)等。使用系数变化量d
kc
以及更新步长μ
kc
的偏差量的情况下,如果这些值大于容许值,则判定为趋向于发散。
[0253]
在s530中,控制电路441使噪音控制滤波器m4的有效抽头数i
tp
减少了调整量δi
tp
(例如、50),结束处理。
[0254]
应予说明,噪音控制滤波器m4构成为:上位的第1个至第i
tp
个的i
tp
个抽头为有效抽头,第i
tp
1个至第l个为止的l-i
tp
个抽头为无效抽头。
[0255]
s430的噪音控制滤波器系数矢量更新处理中,对有效抽头的系数进行更新,无效抽头的系数设定为固定值。另外,在s120的噪音控制滤波器处理中,无效抽头可以用于控制信号un的计算,也可以不用于控制信号un的计算。
[0256]
亦即,更新步长μ
kc
的偏差量大于容许值的情况下,判定为噪音控制滤波器m4的系数矢量w(kc)趋向于发散,使噪音控制滤波器m4的有效抽头自下位侧开始各减少调整量δi
tp
。
[0257]
如果在某一处理循环中计算出较大值的更新步长μ
kc
,则噪音控制滤波器m4的系数矢量w(kc)趋向于发散,作为误差传感器m3的输出的误差信号e
kc
增大。在检测到较大误差信号e
kc
的下一处理循环中,由(17)式可知,计算出较小值的更新步长μ
kc
,发散趋势得以抑制。以下,反复进行同样的操作。亦即,产生:趋向于发散和抑制的反复,该反复使更新步长μ
kc
变动,因此,根据该变动,能够判定系统是否趋向于发散。
[0258]
[3-3.术语对应]
[0259]
本实施方式中,图14所示的系数更新处理中的除了s210以外的处理以及s530相当于本发明中的特性调整部的一例,s520相当于本发明中的发散判定部的一例。
[0260]
[3-4.效果]
[0261]
根据以上详述的第三实施方式,发挥出前述的第一实施方式的效果(1a)(1b)(1c)以及第二实施方式的效果(2a)、(2b),此外,发挥出以下效果。
[0262]
(3a)本实施方式中,使用了:根据噪音控制滤波器m4的系数矢量w(kc)的收敛情况而使更新步长μ
kc
变化的、所谓的步长控制法。因此,即便在干扰功率q
kc
的变动下,也能够使噪音控制滤波器m4的系数矢量w(kc)的推定误差减少到所需值gx以下。
[0263]
(3b)本实施方式中,在更新步长μ
kc
的偏差超过容许值的情况下,持续进行下述的处理,直至更新步长μ
kc
稳定为止,即:将噪音控制滤波器m4中包含的抽头从下位侧开始以各调整量δi
tp
进行无效化的处理。因此,即便在干扰功率q
kc
变动的状况,也能够稳定地更新噪音控制滤波器m4的系数矢量w(kc)。
[0264]
(3c)本实施方式中,反复进行:使更新步长μ
kc
调整用的所需值gx以及判定阈值th呈阶段性地减小的操作,直至由更新所带来的系数矢量w(kc)变化收敛而稳定为止。因此,能够使所需值gx甚至更新步长μ
kc
收敛到:噪音控制滤波器m4稳定地进行动作的适当大小。
[0265]
[4.第四实施方式]
[0266]
[4-1.与第一实施方式之间的不同点]
[0267]
第四实施方式中,应用噪音控制装置10的作业机、以及噪音控制装置10中使用的anc的控制模型与第一实施方式不同。
[0268]
[4-2.吸尘器的构成]
[0269]
对应用噪音控制装置10的电动作业机的另一例、即便携吸尘器8进行说明。便携吸尘器8是:作业者以手持的状态使用的充电式的电动吸尘器。
[0270]
本实施方式中,考虑说明的便利性,针对便携吸尘器8,如图17~图19所示,规定前、后、上、下、左、右。
[0271]
如图17~图19所示,便携吸尘器8具备主体外壳80。主体外壳80具备:吸引口81、排出口82、把持部83、第一及第二蓄电池装配部85a、85b。
[0272]
吸引口81为:在主体外壳80的前部所设置的圆筒状的部位,对外部大气进行吸引。排出口82为:在主体外壳80的后部下方设置的狭缝状的部位,将除去粉尘后的空气予以排出。把持部83是:设置于主体外壳80的上表面,由作业者把持的部位。在把持部83设置有使用者握着把持部83的状态下能够操作的电子开关84。第一及第二蓄电池装配部85a、85b设置于主体外壳80的后表面的上侧。在第一蓄电池装配部85a安装有第一蓄电池组86a,在第二蓄电池装配部85b安装有第二蓄电池组86b。
[0273]
在便携吸尘器8的主体外壳80内设置有驱动单元90和控制电路基板91。
[0274]
驱动单元90设置于外壳内的吸引口81与排出口82之间,并配置成将主体外壳80的内部空间分隔为吸引口侧空间80a和排出口侧空间80b。在吸引口侧空间80a配置有集尘袋。在形成排出口侧空间80b的主体外壳80的内壁设置有吸音材料87。作为吸音材料87,例如采用海绵。另外,在吸音材料87的上部设置有控制扬声器88和误差麦克风89。
[0275]
控制扬声器88以及误差麦克风89以使得指向性朝向排出口侧空间80b且夹着吸音材料87而与排出口侧空间80b对置的方式进行安装。即,以使得在主体外壳80内流动的气流不会直接冲撞误差麦克风89的方式进行配置。
[0276]
另外,误差麦克风89配置于:主体外壳80的收纳空间内产生的噪音的驻波波腹所在的部位。设置有该误差麦克风89的位置成为消音点。在主体外壳80内流动的气流的流路截面积在排出口82处不连续地变化(截面积迅速扩大),使得声音在排出口82处反射,由此产生噪音的驻波。
[0277]
应予说明,控制扬声器88及误差麦克风89基本上具有:与第一实施方式中说明的控制扬声器54及误差麦克风55同样的能力,以同样的想法进行配置。
[0278]
如图18所示,驱动单元90具备:马达外壳901、马达902、以及风扇903。
[0279]
马达外壳901为:与主体外壳80的内壁接触的圆筒状的部件,通过将马达902保持于圆筒的中心而在马达902与马达外壳901的内壁之间形成出截面呈环状的流路80c。
[0280]
马达902是:按照来自控制电路基板91的指示进行工作的直流马达。
[0281]
风扇903固定于马达902的旋转轴。
[0282]
驱动单元90以马达902面向吸引口侧空间80a且风扇903面向排出口侧空间80b的方式安装于主体外壳80的内部。驱动单元90构成为:通过马达902对风扇903进行旋转驱动,使主体外壳80内产生从吸引口81朝向排出口82的气流。
[0283]
当驱动单元90使其产生气流时,经由吸引口81,从主体外壳80的外部空间将外部大气向主体外壳80的内部空间吸引。所吸引的外部大气从吸引口侧空间80a通过时,外部大气中包含的尘埃被集尘袋捕集。通过集尘袋的空气经由流路80c到达排出口侧空间80b,从排出口82排出。
[0284]
[4-3.控制电路基板]
[0285]
控制电路基板91从蓄电池组86接受电源供给而进行工作。控制电路基板91具备:按照电子开关85的操作而对马达902进行驱动的马达控制部911、以及对马达902工作而产生的噪音(以下、对象噪音)进行抑制的噪音控制部912。
[0286]
马达控制部911具备:与图8所示的集尘用电路组442以及控制电路441相当的构成。
[0287]
噪音控制部912具备:与图8所示的第二a/d转换器445、d/a转换器446、控制电路441相当的构成。噪音控制部912能够与控制扬声器88以及误差麦克风89一同实现反馈型anc。即,噪音控制部912、控制扬声器88、误差麦克风89形成噪音控制装置。
[0288]
[4-4.anc模型]
[0289]
使用图20,对噪音控制装置实现的反馈型anc的模型进行说明。其中,与使用图9说明的前馈型anc模型相比,仅有一部分构成不同,因此,对同样的构成标记同一符号并省略说明。
[0290]
如图20所示,反馈型anc具有如下结构,即,与前馈型anc相比较,省略了参考传感器m1,追加了到达滤波器m7以及相加运算器m8。应予说明,控制音源m2相当于控制扬声器88以及图8中的d/a转换器446,误差传感器m3相当于误差麦克风89以及图8中的第二a/d转换器445。
[0291]
噪音控制部912包括微计算机(以下、微型计算机)的情况下,噪音控制滤波器m4、二阶滤波器m5、系数更新部m6、到达滤波器m7、相加运算器m8可以通过微型计算机的处理来实现,其一部分或全部可以通过硬件来实现。
[0292]
新追加的到达滤波器m7具备与二阶滤波器m5同样的构成,根据最近计算出的n个控制信号un(即、n维的控制矢量u(n)),推定表示从控制音源m2到达误差传感器m3的疑似噪音的到达疑似信号an。
[0293]
相加运算器m8通过到达疑似信号an减去误差信号en,来推定出表示对象噪音的参考信号xn。
[0294]
即,反馈型anc中,作为参考信号xn,使用根据控制信号un以及误差信号en得到的推定结果,来代替参考传感器m1的检测结果,这一点与前馈型anc不同。
[0295]
[4-5.处理]
[0296]
噪音控制部912执行的处理基本上与第一~第三实施方式中的任一者中说明的处理相同。不过,图10所示的噪音抑制处理的s110的处理存在如下不同点,即,使用到达滤波器m7来生成到达疑似信号an,进而,通过到达疑似信号an减去误差信号en来生成参考信号xn,以此来代替由参考传感器m1生成参考信号xn。
[0297]
[4-6.术语的对应]
[0298]
本实施方式中,到达滤波器m7相当于本发明中的到达滤波器的一例,相加运算器m8相当于本发明中的相加运算部的一例。
[0299]
[4-7.效果]
[0300]
根据以上详述的第四实施方式,发挥出前述的第一实施方式的效果(1a)(1b)(1c)以及第二实施方式的效果(2a)(2b)、第三实施方式的效果(3a)(3b)(3c),此外,发挥出以下效果。
[0301]
(4a)本实施方式中,使用反馈型anc,因此,可以省略参考传感器m1,从而能够简化装置构成。
[0302]
[5.其他实施方式]
[0303]
(5-1)上述实施方式中,将噪音控制滤波器m4的抽头数l设定为大于二阶滤波器m5的抽头数n,检测到趋向于发散的情况下,将噪音控制滤波器m4的抽头中的成为系数更新对象的抽头的数量限制为上位的m个。本发明的技术不限定于:将噪音控制滤波器m4的抽头数从l个变更为m个,可以预先将噪音控制滤波器m4的抽头数固定为m个。这种情况下,还能够省略:检测发散趋势而限制有效抽头的数量的处理。这种情况下,控制电路441执行的噪音控制处理中,省略图10所示的s140的发散判定处理。
[0304]
(5-2)上述实施方式中,在s110的处理中,作为参考信号xn,使用参考麦克风53的检测信号,不过,参考信号xn为:与对象噪音之间具有相关性的信号即可,不限定于参考麦克风53的检测信号。例如,可以将对马达432进行驱动的信号作为参考信号xn。
[0305]
(5-3)上述实施方式中,控制扬声器54和误差麦克风55、以及控制扬声器88和误差麦克风89均以朝向同一方向的方式并排配置,不过,可以以彼此对向的方式进行配置。
[0306]
(5-4)上述第三实施方式中,使区间长j
bk
恒定,不过,假定信号功率p
kc
变动的情况下,可以使区间长j
bk
可变,进行将区间长j
bk
延长的控制,直至信号功率p
kc
为恒定值为止。
[0307]
(5-5)上述实施方式中,作为应用本发明的技术的电动作业机的例子,例示了集尘机1及便携吸尘器8,不过,成为应用对象的电动作业机不限定于集尘机1以及便携吸尘器8。例如,可以在diy、制造、园艺、工程等作业现场进行使用,适用于利用使用风扇而产生的气流的各种现场用电气设备。具体而言,可以在园艺用的作业机、整顿作业现场的环境的装置等各种电动作业机中应用本发明的技术。更具体而言,例如可以在电动剪草机、电动草坪剪、电动收割机、电动吸尘器、电动鼓风机、电动喷雾器、电动撒布机、电动集尘机等各种电动作业机中应用本发明。
[0308]
(5-6)上述实施方式中的1个构成要素所具有的多个功能可以通过多个构成要素来实现,或者1个构成要素所具有的1个功能可以通过多个构成要素来实现。另外,多个构成要素所具有的多个功能可以通过1个构成要素来实现,或者通过多个构成要素实现的1个功能可以通过1个构成要素来实现。另外,可以省略上述实施方式的构成的一部分。另外,可以将上述实施方式的构成的至少一部分相对于其他的上述实施方式的构成进行附加或置换。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。