技术特征:
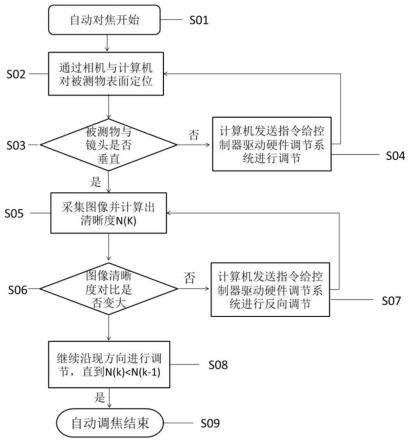
1.一种基于图像处理的显微镜自动对焦系统,其特征在于,该基于图像处理的显微镜自动对焦系统主要由以下机构及装置组成:工业数码相机,安装于显微镜的扫描目镜处;垂直移动槽开于显微镜镜柱上,转轴固定在步进电机上,其伸出端连接载物台,在步进电机的带动下,沿着垂直移动槽垂直移动;滚珠丝杠升降装置,位于显微镜镜柱内,通过伺服电机和精密减速器的驱动,使丝杠带动移动滑台的上下移动;磁粉制动器装置,通过与丝杠上旋转编码器的配合,来实现丝杠停止转动时移动滑台在指定位置也能停止自锁;转动装置,固定在滚珠丝杠升降装置的步进电机工作平台上,包括步进电机和转轴,通过步进电机的正反转调整与之相连的转轴的转动角度,从而调整与转轴另一端相连接的载物台的角度;控制器模块,主要控制滚珠丝杠升降装置中移动滑台的升降位移以及转动装置中步进电机的转动角度;计算机,与工业数码相机、控制器模块相连。2.一种基于权利要求1所述的图像处理的显微镜自动对焦系统的自动对焦方法,其特征在于,控制器模块与计算机相连,计算机将指令输送给控制器模块,控制器模块发出控制信号控制滚珠丝杠与转动装置的运动,从而达到在计算机与控制模块的配合下进行显微镜的自动调焦;包括如下步骤:步骤一:图像采集,被测物体通过工业数码相机获取图像信息,然后将其输入到计算机中,进行信号的调理和a/d转换,主要是将光信号转换为电信号,然后经过处理转换得到数字图像;步骤二:获取被测物体表面的三维坐标,利用被测物体的多个控制点在三维场景中的坐标及其在数字图像中的透视投影坐标,计算出相机坐标系与表示三维场景的世界坐标系之间的位姿关系及矩阵,经过计算后得到被测物表面点位的三维坐标;步骤三:基于被测物表面点位的三维坐标拟合其所在平面,得到若干三维点坐标(x
i
,y
i
,z
i
)后,拟合平面方程ax by cz=d,又由约束条件a2 b2 c2=1得到距离所有三维点最小的平面,此平面位置即为所拟合的被测物体表面的位置;步骤四:计算出被测物体表面是否与工业数码相机的镜头垂直,然后将计算结果输送给控制器模块,从而控制转动装置来调节载物台的角度以达到被测物表面与扫描目镜垂直;步骤五:位于被测物体正上方的工业数码相机需要采集待评价图像来构造参考图像,选取工业数码相机中心区域的图像;步骤六:将工业数码相机当前位置设为初始位置,此时采集的图像定义为待评价图像i,而参考图像i
r
=lpf(i),即对待评价图像i进行低通滤波得到参考图像i
r
,提取待评价图像i和参考图像i
r
的梯度信息;步骤七:使用scharr算子分别提取待评价图像i和参考图像i
r
的水平方向和竖直方向的边缘信息,定义待评价图像i和参考图像i
r
的梯度图像分别是g和g
r
;
步骤八:通过计算方差找出梯度图像g中梯度信息最丰富的n个图像块,记为{x
i
▏
i=1,2,
…
,n},方差越大说明梯度信息越丰富,根据找到的梯度图像g中的前n个块,找出对应的g
r
的前n个块记为{y
i
▏
i=1,2,
…
,n};步骤九:先计算每个x
i
和y
i
的结构相似度ssim(x
i
,y
i
),然后计算结构清晰度nrss;图像的无参考结构清晰度nrss定义如下:步骤十:设此时得出的图像清晰度评价值为n1,然后控制器模块控制滚珠丝杠升降装置,其将带动载物台沿着与被测物平面垂直的方向移动一定的步长l,工业数码相机采集此处的待评价图像后,在计算机中构造参考图像并通过计算方差得到梯度信息最丰富的地方,然后使用无参考结构清晰度评价函数nrss计算出该位置的清晰度评价值n2;若此时n2>n1,则清晰度变大了说明调焦系统正靠着调焦正确的方向移动,控制器模块继续按当前指令控制滚珠丝杠升降装置带动载物台沿当前方向移动;若此时n2<n1,则清晰度变小了说明调焦系统调焦方向相反,此时应该反方向调焦,即控制器模块发送新的指控制滚珠丝杠升降装置带动载物台沿与刚刚方向相反的方向移动同时步长l应该缩减为原来的一半,直到出现n(k)<n(k-1)时,调焦过程结束。
技术总结
本发明属于显微镜自动对焦技术领域,公开了一种基于图像处理的显微镜自动对焦方法及系统,利用所获图像被测物表面的点位信息拟合被测物表面的平面位置,进而判断被测样品表面与相机镜头的位置关系,配合硬件系统调整样品位置,为后续的对焦工作做准备。相机再次采集图像后,使用无参考结构清晰度评价函数NRSS对当前对焦量的图像进行清晰度评价,将评价值的大小作为反馈发送给控制器模块,以此控制载物台调节焦距,实现显微镜的自动对焦。本发明的方法及系统能实现显微系统高精度、实时性的自动对焦。动对焦。动对焦。
技术研发人员:王慧慧 李春鹏 张春旭 张旭 杨继新
受保护的技术使用者:大连工业大学
技术研发日:2022.04.19
技术公布日:2022/7/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。