1.本发明涉及机器人技术领域,具体为一种多功能四轮独立机器人底盘及其使用方法。
背景技术:
2.机器人是靠自身动力和控制能力来实现各种功能的一种机器,是一种可编程和多功能的操作机,或是为了执行不同的任务而具有可用电脑改变和可编程动作的专门系统。在移动机器人领域,其底盘的性能也决定了其应用范围的广度,底盘性能的一个重要指标即为驱动轮着地性能,需要一种多功能的四轮独立机器人配合使用。
3.现有的机器人移动底盘普遍存在运动笨拙、不灵活问题,当检测区域狭小时,移动机器人不能快速的转弯和移动,导致移动机器人对检测区域检测存在死角的问题,严重影响巡检任务的正常进行,通过性和较强的越障能力较差,当采用前轮偏转的方式转弧形弯时,车纶与地面虽然为滚动摩擦,但是由于车身尺寸的原因会使得小车转弯半径过大,在空间狭小的区域机器人巡检移动十分不便,移动底盘转弯半径无法调节。
技术实现要素:
4.(一)解决的技术问题
5.针对现有技术的不足,本发明提供了一种多功能四轮独立机器人底盘及其使用方法,具备四轮独立减震、转向及驱动等优点,解决了机器人底盘检测存在死角,巡检移动十分不便以及移动底盘转弯半径无法调节的问题。
6.(二)技术方案
7.为实现上述目的,本发明提供如下技术方案:一种多功能四轮独立机器人底盘及其使用方法,包括底盘框架,所述底盘框架的左右两侧均固定安装有左驱动轮和右驱动轮,所述左驱动轮和右驱动轮的侧面且在底盘框架的表面均固定安装有从动轮,所述左驱动轮、右驱动轮、从动轮和底盘框架之间均活动安装有承载架,所述左驱动轮和右驱动轮与底盘框架的连接处设置有转向装置,所述左驱动轮和右驱动轮的中心处且在底盘框架内部设置有驱动组件,相邻所述转向装置之间设置有调节机构。
8.所述转向装置包括减震架、转向连接件、固定连杆、滑动板、连接架、定位板和转向动力源,所述左驱动轮、右驱动轮、从动轮与底盘框架的连接处均活动安装有减震架,且左驱动轮、右驱动轮、从动轮的内侧活动安装有转向连接件,所述转向连接件的末端活动安装有固定连杆,相邻所述固定连杆之间固定安装有滑动板,所述滑动板的内部贯穿有连接架,所述连接架的两端分别安装有定位板和转向动力源。
9.优选的,所述驱动组件包括驱动源、摩擦轮、主皮带和副皮带,所述左驱动轮和右驱动轮的内侧均固定安装有摩擦轮,相邻所述摩擦轮之间固定连接有主皮带,所述摩擦轮与驱动源的输出端通过副皮带固定连接,所述驱动源固定安装在底盘框架的内部。
10.优选的,所述调节机构包括防撞壳、螺纹转杆、限位柱、套壳和勾板架,所述底盘框
架的前表面活动安装有防撞壳,所述防撞壳的内部且在底盘框架的中心处贯穿有螺纹转杆,所述螺纹转杆和防撞壳之间插接有限位柱,所述螺纹转杆的末端滑动安装在套壳的内部,所述套壳的左右两侧均滑动安装有勾板架。
11.优选的,所述勾板架卡接在滑动板的下表面,所述勾板架的内部均等距开设有与螺纹转杆相对应的通孔,所述限位柱垂直贯穿于螺纹转杆和底盘框架之间,在车轮转动的过程中,滑动板会在勾板架表面移动,从而使勾板来限制车胎的转弯半径。
12.优选的,所述连接架与定位板的连接处分别设置有相对应的螺纹,所述定位板和滑动板为平行对应设置,所述滑动板以底盘框架的中心为准呈左右对称设置,利用转向动力源转向来驱动转向滑动板向底盘框架的内侧的往复平移运动,来控制底盘的转向功能。
13.根据上述的一种多功能四轮独立机器人底盘,现提出一种多功能四轮独立机器人底盘的使用方法,包括以下步骤:
14.s1、在需要机器人底盘移动时,启动底盘框架内部的驱动源,驱动源启动后,在副皮带的作用下带动摩擦轮旋转,摩擦轮首先会带动相对应的左驱动轮和右驱动轮转动,来实现底盘移动;
15.s2、当需要直行前进时,首先左驱动轮和右驱动轮使底盘周围的从动轮同步旋转,保证左驱动轮和右驱动轮与从动轮的行进方向在同一直线上;
16.s3、当需要原地转弯时,控制转向动力源来带动连接架旋转,连接架旋转时带动定位板与内部的滑动板朝对应的方向往复平移运动,滑动板与固定连杆来带动转向连接件移动,从而使每个车轮偏的行进方向与同一个圆相切即可:
17.s4、当需要转弧形弯时,在转向动力源的驱动下来使底盘框架内部的滑动板同时朝一侧方向移动,使转向连接件推动左驱动轮和右驱动轮,使每个车轮偏的方向一致来转弧形弯,
18.s5、当需要调节转弯半径时,转动螺纹转杆来贯穿相邻的勾板架之间,来限制勾板架上方的滑动板平移幅度,从而在转向连接件推动车胎时的距离受到限制,能够随意调节机器人底盘的转弯半径。
19.(三)有益效果
20.与现有技术相比,本发明提供了一种多功能四轮独立机器人底盘及其使用方法,具备以下有益效果:
21.1、该多功能四轮独立机器人底盘及其使用方法,通过驱动源启动后在副皮带的作用下带动摩擦轮旋转,摩擦轮首先会带动相对应的左驱动轮和右驱动轮转动,来实现底盘移动,同时在摩擦轮转动时主皮带的作用下,左驱动轮和右驱动轮使底盘周围的从动轮同步旋转,左驱动轮和右驱动轮与从动轮的行进方向在同一直线上,同时通过与车轮中的减震架实现四轮独立减震效果,来保证行进方向直行。
22.2、该多功能四轮独立机器人底盘及其使用方法,当需要原地转弯时,控制转向动力源来带动连接架旋转,连接架旋转时带动定位板与内部的滑动板朝对应的方向往复平移运动,滑动板与固定连杆来带动转向连接件移动,从而使每个车轮偏的行进方向与同一个圆相切,当需要转弧形弯时,在转向动力源的驱动下来使底盘框架内部的滑动板同时朝一侧方向移动,使转向连接件推动左驱动轮和右驱动轮,使每个车轮偏的方向一致来转弧形弯,从而实现四轮独立减震、转向及驱动的功能,能快速的转弯和移动。
23.3、该多功能四轮独立机器人底盘及其使用方法,通过当需要调节车胎的转弯半径时,打开防撞壳转动螺纹转杆,使螺纹转杆旋转时贯穿相邻的勾板架之间,来限制勾板架上方的滑动板平移幅度,从而在转向连接件推动车胎时的距离受到限制,能够随意调节机器人底盘的转弯半径,适用于不同的路况。
附图说明
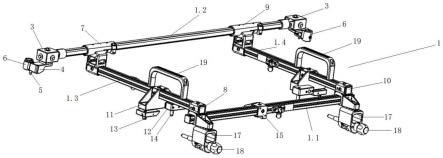
24.图1为本发明整体的立体结构示意图;
25.图2为本发明整体的底部仰视结构示意图;
26.图3为本发明调节机构的内部结构示意图;
27.图4为本发明整体的后视立体结构示意图。
28.其中:1、底盘框架;2、左驱动轮;3、右驱动轮;4、从动轮;5、承载架;6、转向装置;601、减震架;602、转向连接件;603、固定连杆;604、滑动板;605、连接架;606、定位板;607、转向动力源;7、驱动组件;701、驱动源;702、摩擦轮;703、主皮带;704、副皮带;8、调节机构;801、防撞壳;802、螺纹转杆;803、限位柱;804、套壳;805、勾板架。
具体实施方式
29.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
30.请参阅图1-4,一种多功能四轮独立机器人底盘及其使用方法,包括底盘框架1,底盘框架1的左右两侧均固定安装有左驱动轮2和右驱动轮3,左驱动轮2和右驱动轮3的侧面且在底盘框架1的表面均固定安装有从动轮4,左驱动轮2、右驱动轮3、从动轮4和底盘框架1之间均活动安装有承载架5,左驱动轮2和右驱动轮3与底盘框架1的连接处设置有转向装置6,转向装置6包括减震架601、转向连接件602、固定连杆603、滑动板604、连接架605、定位板606和转向动力源607,左驱动轮2、右驱动轮3、从动轮4与底盘框架1的连接处均活动安装有减震架601,且左驱动轮2、右驱动轮3、从动轮4的内侧活动安装有转向连接件602,转向连接件602的末端活动安装有固定连杆603,相邻固定连杆603之间固定安装有滑动板604,滑动板604的内部贯穿有连接架605,连接架605的两端分别安装有定位板606和转向动力源607,连接架605与定位板606的连接处分别设置有相对应的螺纹,定位板606和滑动板604为平行对应设置,滑动板604以底盘框架1的中心为准呈左右对称设置。
31.通过上述技术方案,利用连接架605旋转时带动定位板606与内部的滑动板604朝对应的方向往复平移运动,滑动板604与固定连杆603来带动转向连接件602移动,从而使每个车轮偏的行进方向与同一个圆相切,来带到转圆的效果。
32.具体的,如图2所示,左驱动轮2和右驱动轮3的中心处且在底盘框架1内部设置有驱动组件7,驱动组件7包括驱动源701、摩擦轮702、主皮带703和副皮带704,左驱动轮2和右驱动轮3的内侧均固定安装有摩擦轮702,相邻摩擦轮702之间固定连接有主皮带703,摩擦轮702与驱动源701的输出端通过副皮带704固定连接,驱动源701固定安装在底盘框架1的内部。
33.通过上述技术方案,在摩擦轮702转动时主皮带703的作用下,左驱动轮2和右驱动轮3使底盘周围的从动轮4同步旋转,左驱动轮2和右驱动轮3与从动轮4的行进方向在同一直线上,同时通过与车轮中的减震架601一同组合。
34.具体的,如图3所示,相邻转向装置6之间设置有调节机构8,调节机构8包括防撞壳801、螺纹转杆802、限位柱803、套壳804和勾板架805,底盘框架1的前表面活动安装有防撞壳801,防撞壳801的内部且在底盘框架1的中心处贯穿有螺纹转杆802,螺纹转杆802和防撞壳801之间插接有限位柱803,螺纹转杆802的末端滑动安装在套壳804的内部,套壳804的左右两侧均滑动安装有勾板架805,勾板架805卡接在滑动板604的下表面,勾板架805的内部均等距开设有与螺纹转杆802相对应的通孔,限位柱803垂直贯穿于螺纹转杆802和底盘框架1之间。
35.通过上述技术方案,通过螺纹转杆802旋转时贯穿相邻的勾板架805之间,来限制勾板架805上方的滑动板604平移幅度,从而在转向连接件602推动车胎时的距离受到限制,
36.根据上述的一种多功能四轮独立机器人底盘,现提出一种多功能四轮独立机器人底盘的使用方法,包括以下步骤:
37.s1、在需要机器人底盘移动时,启动底盘框架1内部的驱动源701,驱动源701启动后,在副皮带704的作用下带动摩擦轮702旋转,摩擦轮702首先会带动相对应的左驱动轮2和右驱动轮3转动,来实现底盘移动;
38.s2、当需要直行前进时,首先左驱动轮2和右驱动轮3使底盘周围的从动轮4同步旋转,保证左驱动轮2和右驱动轮3与从动轮4的行进方向在同一直线上;
39.s3、当需要原地转弯时,控制转向动力源607来带动连接架605旋转,连接架605旋转时带动定位板606与内部的滑动板604朝对应的方向往复平移运动,滑动板604与固定连杆603来带动转向连接件602移动,从而使每个车轮偏的行进方向与同一个圆相切即可:
40.s4、当需要转弧形弯时,在转向动力源607的驱动下来使底盘框架1内部的滑动板604同时朝一侧方向移动,使转向连接件602推动左驱动轮2和右驱动轮3,使每个车轮偏的方向一致来转弧形弯,
41.s5、当需要调节转弯半径时,转动螺纹转杆802来贯穿相邻的勾板架805之间,来限制勾板架805上方的滑动板604平移幅度,从而在转向连接件602推动车胎时的距离受到限制,能够随意调节机器人底盘的转弯半径。
42.在使用时,需要机器人移动时,通过底盘框架1内部的驱动源701启动,驱动源701启动后在副皮带704的作用下带动摩擦轮702旋转,摩擦轮702首先会带动相对应的左驱动轮2和右驱动轮3转动,来实现底盘移动,同时在摩擦轮702转动时主皮带703的作用下,左驱动轮2和右驱动轮3使底盘周围的从动轮4同步旋转,左驱动轮2和右驱动轮3与从动轮4的行进方向在同一直线上,同时通过与车轮中的减震架601实现四轮独立减震效果,来保证行进方向直行,当需要原地转弯时,控制转向动力源607来带动连接架605旋转,连接架605旋转时带动定位板606与内部的滑动板604朝对应的方向往复平移运动,滑动板604与固定连杆603来带动转向连接件602移动,从而使每个车轮偏的行进方向与同一个圆相切,当需要转弧形弯时,在转向动力源607的驱动下来使底盘框架1内部的滑动板604同时朝一侧方向移动,使转向连接件602推动左驱动轮2和右驱动轮3,使每个车轮偏的方向一致来转弧形弯,从而实现四轮独立减震、转向及驱动的功能,当需要调节车胎的转弯半径时,打开防撞壳
801转动螺纹转杆802,使螺纹转杆802旋转时贯穿相邻的勾板架805之间,来限制勾板架805上方的滑动板604平移幅度,从而在转向连接件602推动车胎时的距离受到限制,能够随意调节机器人底盘的转弯半径,适用于不同的路况。
43.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。