技术特征:
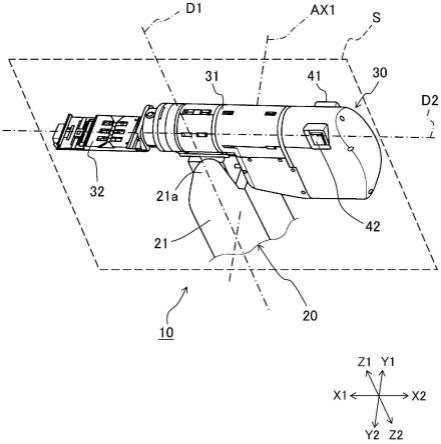
1.一种医疗用机器人,其特征在于,具备:臂部;控制部,其控制对所述臂部的驱动;保持体,其与所述臂部在连接部处连接,并保持被保持体;以及切换开关,其设置于所述保持体,用于在控制状态与手动状态间择一地切换,所述控制状态为由所述控制部控制对所述臂部的驱动的状态,所述手动状态为解除了所述控制部的控制的状态,所述切换开关配置于夹着基准面的两侧中的至少一方,该基准面包括所述臂部的延伸的方向和所述被保持体的延伸的方向,所述控制部基于来自所述切换开关的操作信号,对在所述控制状态与所述手动状态间的切换进行控制。2.根据权利要求1所述的医疗用机器人,其特征在于,所述切换开关以如下方式设置于所述保持体:在所述被保持体的延伸的方向,所述切换开关位于夹着所述连接部而在所述被保持体的相反侧的位置。3.根据权利要求1或者权利要求2所述的医疗用机器人,其特征在于,包括防止部,所述防止部用于防止因所述切换开关与位于其周围的干扰体接触而在所述控制状态与所述手动状态间切换的情形。4.根据权利要求3所述的医疗用机器人,其特征在于,作为所述防止部,所述切换开关是如下开关:在所述切换开关向所述保持体的内侧被压入时,所述控制部输出用于从所述控制状态向所述手动状态切换的控制信号,在所述切换开关的按压被解除时,所述控制部输出用于从所述手动状态向所述控制状态复位的控制信号。5.根据权利要求3所述的医疗用机器人,其特征在于,作为所述防止部,所述切换开关是如下开关:所述切换开关每次向所述保持体的内侧被按压时,所述控制部输出用于在所述控制状态与所述手动状态间相互切换的操作信号。6.根据权利要求4或者权利要求5所述的医疗用机器人,其特征在于,所述切换开关是在被按压了既定时间以上时进行工作的开关。7.根据权利要求4至权利要求6中的任一项所述的医疗用机器人,其特征在于,所述切换开关具有:夹着所述基准面在一方侧设置的第一切换开关;以及在另一方侧设置的第二切换开关,所述控制部基于来自所述第一切换开关和所述第二切换开关中的一方的操作信号,在所述控制状态与所述手动状态间切换。8.根据权利要求7所述的医疗用机器人,其特征在于,所述控制部在基于从所述第一切换开关输出的所述操作信号实施了从所述控制状态向所述手动状态切换的控制的情况下,在被输入了从所述第一切换开关输出的其它所述操作信号时,实施从所述手动状态向所述控制状态复位的控制,在基于从所述第二切换开关输出的所述操作信号实施了从所述控制状态向所述手动状态切换的控制的情况下,在被输入了从所述第二切换开关输出的其它所述操作信号时,实施从所述手动状态向所述控制状态复位的控制。
9.根据权利要求1至权利要求8中的任一项所述的医疗用机器人,其特征在于,所述保持体具备旋转机构,该旋转机构能够使所述被保持体以沿着所述被保持体的延伸的方向的轴为中心而相对于所述保持体进行相对旋转。10.根据权利要求9所述的医疗用机器人,其特征在于,所述切换开关设置成,在所述被保持体相对于所述保持体进行相对旋转时,保持相对于所述保持体的相对位置。11.根据权利要求3至权利要求8中的任一项所述的医疗用机器人,其特征在于,除了具备作为所述臂部的第一臂部以外还具备至少一个第二臂部,所述臂部具备设置有所述切换开关的所述保持体,所述干扰体包括位于所述第一臂部的周围的所述第二臂部。12.根据权利要求11所述的医疗用机器人,其特征在于,所述第二臂部具备与所述第一臂部中的所述保持体以及所述切换开关分别同等的保持体以及切换开关。
技术总结
施行手术者本人能够在短时间内操作切换开关,并且能够防止因接近的构件的接触、施行手术者等的误操作而导致切换开关进行工作的情形。医疗用机器人具备:臂部;控制部,其控制对臂部的驱动;保持体,其与臂部在连接部处连接并保持被保持体;以及切换开关,其设置于保持体,用于在控制状态与手动状态间择一地切换,该控制状态为由控制部控制对臂部的驱动的状态,该手动状态为解除了控制部的控制的状态,切换开关配置于夹着基准面的两侧中的至少一方,基准面包括臂部的延伸的方向和被保持体的延伸的方向,控制部基于来自切换开关的操作信号,对在控制状态与手动状态间的切换进行控制。制。制。
技术研发人员:森田直也
受保护的技术使用者:瑞德医疗机器股份有限公司
技术研发日:2020.02.18
技术公布日:2022/7/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。